
LOGO
Pow erPoint Chương 3
Cảm biến nhiệt độ
Chương 3
Cảm biến nhiệt độ
3.1.Khái niệm cơ bản
Nhiệt độ là một trong số những đại lượng ảnh hưởng rất lớn đến tính chất
vật chất.
Nhiệt độ chỉ có thể đo gián tiếp dựa vào sự phụ thuộc của tính chất vật liệu
vào nhiệt độ.
3.1.1.Thang đo nhiệt độ
Thang nhiệt độ nhiệt động học tuyệt đối: Thang Kelvin (K)
Điểm cân bằng của ba trạng thái nước-nước đá-hơi = 273,15 K
Thang Celsius: (0C)
10C = 1K
T (0C)=T(K) - 273,15
Thang Fahrenheit (0F)
T (0C)=(T(0F) – 32).(5/9)
T(0F) = 9/5. T (0C) +32
Xuất xứ:dựa trên 3 điểm cân bằng: NH4Cl+nước đa = 00F; nước +
nước đá = 32 0F; nhiệt độ cơ thể người =96 0F
3.1.2.Nhiệt độ đo được và nhiệt độ cần đo
Giả sử : Tx:Nhiệt độ thực của môi trường đo.
Tc:Nhiệt độ của phần tử cảm nhận của cảm biến.
Khi đó Txgọi là nhiệt độ cần đo,Tcgọi là nhiệt đọ đo được.
Điều kiện để đo đúng : Tx=Tctuy nhiên do nhiều nguyên nhân luôn tồn
tại 1 chênh lệch Tx–Tcnhất định.Độ chính xác của phép đo phụ thuộc
vào hiệu số Tx–Tchiệu số ngày càng bé thì độ chính xác càng cao.Muốn
vậy khi đo cần phải:
-Tăng cường sự trao đổi nhiệt giữa 2 bề mặt cảm biến và môi trường
đo.
-Giảm sự trao đổi nhiệt giữa bộ cảm biến và môi trương bên ngoài.
Khảo sát trường hợp đo bằng cảm biến tiếp xúc.Lượng nhiệt truyền
từ môi trường vào bộ cảm biến :
Với : -hệ số dẫn nhiệt
A-diện tích bề mặt trao đổi nhiệt.
T- Thời gian trao đổi nhiệt.
( )
dQ A T T dt
x c
Lượng nhiệt hấp thụ:
Với : m-Khối lượng cảm biến.
C-Nhiệt lượng của cảm biến.
Nếu bỏ qua tổn thất nhiệt của cảm biến ra môi trường ngoài và giá đỡ,ta có :
Đặt ,gọi là hằng số thời gian nhiệt,ta có :
Nghiệm của phương trình có dạng :
Để tăng cường trao đổi nhiệt giữa môi trường có nhiệt độ cần đo và CB ta dùng
cảm biến có tỉ nhiệt thấp,hệ số dẫn nhiệt cao,để hạn chế tổn từ CB ra bên ngoài
thì các tiếp điểm dẫn từ phần tử cảm nhận ra mạch đo bên ngoài phải có hệ số
dẫn nhiệt thấp
dQ mCdT
c
( )
A T T dt mCdt
x c
mC
A
dT
dt
c
T T
x c
1
T T ke
c x
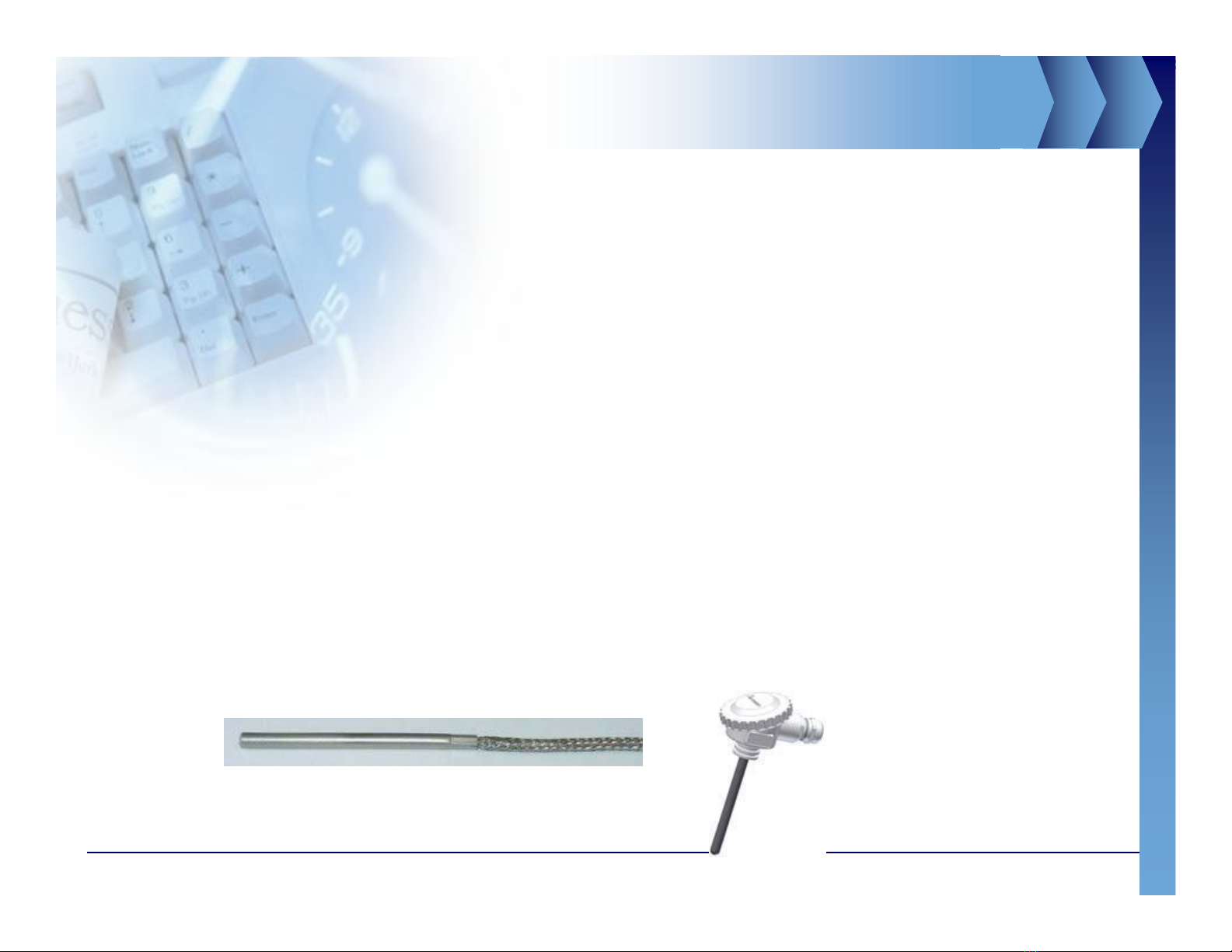
3.1.3.Phân loại cảm biến đo nhiệt độ
Các cảm biến đo nhiệt độ được chia làm 2 nhóm :
-Cảm biến tiếp xúc :cảm biến tiếp xúc môi trường đo,gồm :
+Cảm biến giãn nở(nhiệt kế giãn nở).
+Cảm biến điện trở(nhiệt điện trở).
+Cặp nhiệt ngẫu.
-Cảm biến không tiếp xúc : hỏa kế.
Dưới đây là một số loại cảm biến cơ bản:
3.2.Nhiệt kế giãn nở.
Nguyên lý hoạt động của nhiệt kế giãn nở dựa vào sự co giãn nở
của vật liệu khi tăng nhiệt độ.Nhiệt kế này kết cấu đơn giản,dễ chế
tạo.
3.2.1.Nhiệt kế giãn nở dùng chất rắn
Thường có 2 loại :gốm và kim loại,kim loại và kim loại.




![Cảm biến biến dạng: [Thêm từ khóa phụ/mô tả để tối ưu SEO]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131225/meomay_12/135x160/4501387962886.jpg)




![Giáo trình Kỹ thuật chung về ô tô (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/39771779074470.jpg)
![Giáo trình Kỹ thuật chung về ô tô và công nghệ sửa chữa (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/23311779074471.jpg)



![Giáo trình Hệ thống nhiên liệu động cơ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Ngành Công nghệ ô tô]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/37511778728704.jpg)
![Giáo trình Hệ thống phanh ABS Công nghệ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/1901778728704.jpg)





![Giáo trình Hệ thống điện thân xe ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/611778728708.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)