
LOGO
Cảm biến biến dạng
Hà Nội-2011
1.Biến dạng và phương pháp đo
1.1.Định nghĩa một số đại lượng cơ học
-Định nghĩa biến dạng : =l/ l l- kích thước ban đầu
l- độ biến thiên kích thước.
-Giới hạn đàn hồi:Là ứng lực tối đa không gây nên biến dạng dẻo
vượt qua 2 % t ính bằng kG/ m m 2.Ví dụ giới hạn đàn hồi của t hép
~ 2 0 - 8 0 kG/ m m 2.
-Môđun Young( Y) :
ll = 1 / Y.F/ S= 1 / Y.( kG/ m m 2)
F- lực t ác dụng,kG
S- tiết diện chịu lực,mm2
-ứng lực,= F/ S
ll( t hé p) = 1 8 .0 0 0 - 2 9 .0 0 0 kG/ m m 2
-Hệ số poison : = - ll (biến dạng t heo phương với lực)
Trong vùng biến dạng đàn hồi :0 ,3
1.2.Phương pháp đo biến dạng
Hiện nay sử dụng phổ biến 2 loại đầu đo biến dạng:
-Đầu đo diện trở:loại đầu đo dùng phổ biến nhất.Chế tạo từ
vật liệu có điện trở biến t hiên theo mức độ biến dạng,kích
thước nhỏ:vài m m - vài cm .Khi đo được dán trực tiếp lên cáu
trúc biến dạng
-Đầu đo dạng dây rung dùng trong ngành xây dựng.Đầu đo
là m bằng 1 sợi dây kim loại căng giữa 2 điển cần đo biến
dạng.
2.Đầu đo điện trở kim loại.
2.1.Cấu tạo và nguyên lý hoạt động.
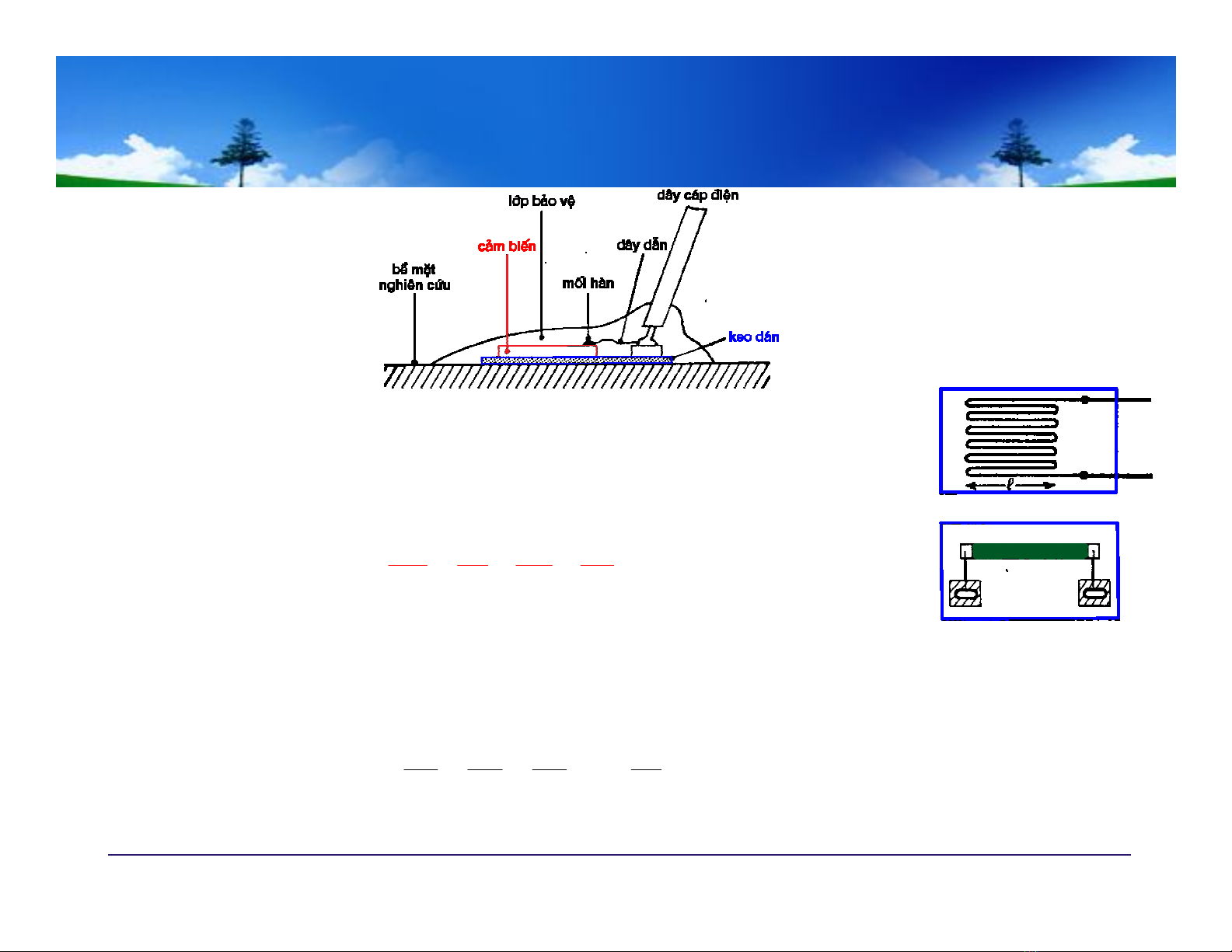
-Dạng dây dẫn:
Dây điện trở kim loại gắn trên đế:
Đường kính dâ y:d2 0 m
Bề dày giá đỡ :0 ,1 m m ( giấy)
0 ,3 m m ( nhựa)
-- DạngDạng m àngm àng lướilưới::
MàngMàng kimkim loạiloại chếchế tạotạo trêntrên đếđế
TạoTạo hìnhhình dạngdạng quangquang trởtrở bằngbằng phươngphương pháppháp quangquang khắckhắc
KíchKích thướcthước :m m:m m -- cmcm
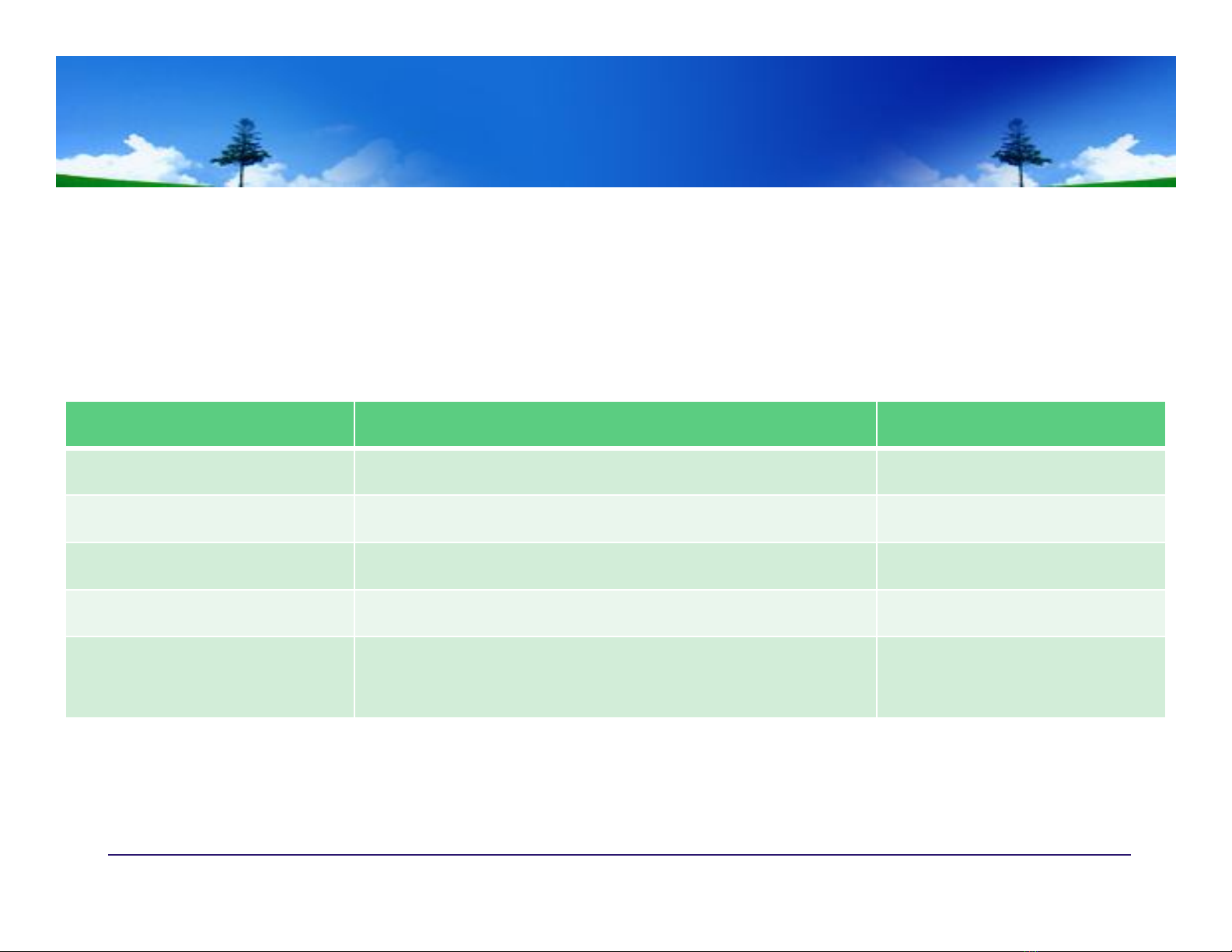
-- VậtVật liệu:thườngliệu:thường thuộcthuộc họhọ hợphợp k imk im N iN i
Hợp kim Thành phần Hệ số đầu đo K
Constantan 45% Ni,55% Cu 2,1
Isoelastic 52% Fe,36% Ni,8% Cr,4% (Mn+ Mo) 3,5
Karm a 74% Ni,20% Cr,3% Cu,3% Fe 2,1
Nicrome V 80% Ni,20% Cr 2,5
Bạch kim-volfram 92% Pt,8% W 4,1
KhiKhi đođo cảmcảm biếnbiến đượcđược dándá n lênlê n bềbề mặcmặc cầncần đođo biếnbiến dạngdạng
BiếnBiến dạngdạng củacủa vậtvật nghiênnghiên cứucứu cảmcảm biếnbiến bịbị biếnbiến dạngdạng
t ha ytha y đổiđổi R R củacủa cảmcảm biếnbiến
CấuCấu t rúct rúc cảmcảm biếnbiến::
LướiLưới bằngbằng dâydây dẫn:điệndẫn:điện trởtrở suấtsuất ,,tiếttiết diệndiện SS
chiềuchiều dàidài nlnl ( n( n-- sốsố đoạnđoạn))
ĐiệnĐiện trởtrở củacủa cảmcảm biến:Rbiến:R== l/ S .l/ S .biếnbiến dạngdạng RR
BiếnBiến dạngdạng dọcdọc củacủa dâydây thaythay đổiđổi kíchkích thướcthước
chiềuchiều ngangngang 1,b,hoặc d1,b,hoặc d
QuanQuan hệhệ giữagiữa biếnbiến dạngdạng ngangngang vàvà biếnbiến dạngdạng dọcdọc::
S
S
R
R
d
d
b
b
a
a




![Cảm biến nhiệt độ: Chương 3 [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20131225/meomay_12/135x160/4581387962870.jpg)




![Giáo trình Kỹ thuật chung về ô tô (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/39771779074470.jpg)
![Giáo trình Kỹ thuật chung về ô tô và công nghệ sửa chữa (Nghề: Công nghệ ô tô) - Trường Cao đẳng Bách Khoa Tây Nguyên [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/23311779074471.jpg)



![Giáo trình Hệ thống nhiên liệu động cơ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Ngành Công nghệ ô tô]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/37511778728704.jpg)
![Giáo trình Hệ thống phanh ABS Công nghệ ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/1901778728704.jpg)





![Giáo trình Hệ thống điện thân xe ô tô (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoatrami2026/135x160/611778728708.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)