
P-ISSN 1859-3585 E-ISSN 2615-9619 https://jst-haui.vn SCIENCE - TECHNOLOGY
Vol. 60 - No. 11 (Nov 2024) HaUI Journal of Science and Technology 31
THIẾT KẾ BỘ ĐIỀU KHIỂN TRƯỢT BACKSTEPPING
CHO UAV KIỂU QUADROTOR CÓ TÍNH ĐẾN SỰ BẤT ĐỊNH
CỦA MÔ HÌNH
DESIGN OF BACKSTEPPING SLIDING MODE CONTROLLER
FOR QUADROTOR-TYPE UAV CONSIDERING MODEL UNCERTAINTY
Đặng Tiến Trung1,*, Phạm Thị Thanh Đam1
DOI: http://doi.org/10.57001/huih5804.2024.363
TÓM TẮT
Bài báo trình bày kết quả tổng hợp mô hình c
ủa UAV Quadrotor, có tính
đến các ràng buộc phi tuyến, bất định mô hình và nhi
ễu loạn khí động học. Từ
đó sử dụng bộ điều khiển trư
ợt backstepping thích nghi để đảm bảo tính ổn
định, bền vững. Kết quả nghiên cứu được đánh giá thông qua mô phỏng tr
ên
phần mềm Matlab-Simulink cho thấy bộ điều khiển đã đạt được các yêu c
ầu
chất lượng điều khiển.
Từ khóa: Điều khiển cuốn chiếu, phương tiện bay không ngư
ời lái, thích
nghi, bền vững.
ABSTRACT
The paper presents the results of synthesizing the model of the Quadrotor
UAV, taking into account nonlinear constraints, model uncertainties and
aerodynamic disturbances. From there, an adaptive backstepping sliding
controller is used to ensure stability
and sustainability. The results are
evaluated through simulation on Matlab-
Simulink software, showing that the
controller has achieved the control quality requirements.
Keywords:
Backstepping control, Unmanned Aerial Vehicle (UAV),
Adaptive, Robust.
1Khoa Kỹ thuật điện, Trường Đại học Điện lực
*Email: dangtientrung@gmail.com
Ngày nhận bài: 10/9/2024
Ngày nhận bài sửa sau phản biện: 25/10/2024
Ngày chấp nhận đăng: 28/11/2024
1. GIỚI THIỆU
Unmanned Aerial Vehicle (UAV) là phương tiện bay
được điều khiển từ xa, tự bay theo lộ trình định sẵn hoặc
theo điều khiển của các hệ thống máy tính. Thời gian qua,
UAV không ngừng được nâng cấp, phát triển và được ứng
dụng vào nhiều lĩnh vực của đời sống xã hội. Trong quân
sự, vai trò của UAV đang ngày càng khẳng định tầm quan
trong trên chiến trường. Để điều khiển quỹ đạo bay của
UAV quadrotor cần có các bộ điều khiển các góc trạng
thái như: ϕ góc pitch; θ góc roll; ψ góc yaw [1, 2]. Với điều
kiện bay phức tạp, có nhiễu động gió kết hợp mô hình bất
định của UAV thì cần xây dựng bộ điều khiển bền vững,
chống rung tốt, tác động nhanh. Qua khảo sát cho thấy,
bộ điều khiển trượt backstepping thích nghi cho kết quả
điều khiển tốt ngay cả khi có nhiễu loạn tác động [3, 4].
2. MÔ HÌNH TOÁN
Hình 1. UAV kiểu Quadrotor
Xét hệ quy chiếu quán tính có gốc tại A(O,X,Y,Z) và
hệ tọa độ có gốc tại trọng tâm Quadrotor B(o,x,y,z) như
hình 1.

CÔNG NGHỆ https://jst-haui.vn
Tạp chí Khoa học và Công nghệ Trường Đại học Công nghiệp Hà Nội Tập 60 - Số 11 (11/2024)
32
KHOA H
ỌC
P
-
ISSN 1859
-
3585
E
-
ISSN 2615
-
961
9
Từ các giả định: cấu trúc Quadrotor là cứng và đối
xứng; lực đẩy và lực cản tỷ lệ thuận với bình phương
của tốc độ của cánh quạt. Sử dụng công thức của
Newton-Euler, các phương trình động lực học được viết
dưới dạng sau:
y z x
x
z x y
y
z
z
L
L
L
1θψ I I T
I
1
θ ψ I I T
I
T
ψI
1
x cos sin
θcosψ sin sinψ F
m
1
y cos sin
θsinψ sin cosψ F
m
1
z cos cosθ F g
m
(1)
Trong đó, m là khối lượng,
3 3
J R
là ma trận quán tính
hằng số xác định dương đối xứng của Quadrotor.
x
y
z
I 0 0
J 0 I 0
0 0 I
Tx, Ty, Tz lần lượt là moment xoắn theo các trục x, y, z;
FL là tổng lực nâng do 4 động cơ tạo ra
L 1 2 3 4
F F F F F
;
g là gia tốc trọng trường; ϕ là góc pitch; θ là góc roll; ψ là
góc yaw.
Nếu tính đến các thành phần bất định fi trong mô hình
có:
y z x 1 2
x
z x y 3 4
y
z5 6
z
L x
L y
L z
1θψ I I T f θ f θ f
I
1
θ ψ I I T f f f
I
T
ψ f ψ f ψ f
I
1
x cos sin
θcosψ sin sinψ F f x
m
1
y cos sin
θsinψ sin cosψ F f y
m
1
z cos cosθ F g f
m
(2)
3. THIẾT KẾ BỘ ĐIỀU KHIỂN TRƯỢT BACKSTEPPING
THÍCH NGHI
Trong phần này, sẽ đi thiết kế luật điều khiển cho kênh
z, các kênh điều khiển khác được suy ra tương tự. Dựa trên
hệ phương trình (1), phương trình động của kênh z
như sau:
L
1
z cos cos
θ F g
m
(3)
Đặt: 1 2
X z;X z
;
1 L
U F
. Đưa (3) về hệ:
1 2
2 1
X X
1
X cos cos
θU g
m
(4)
Có sai lệch
1 1 d
e X z
1 1 d 2 d
e X z X z
(5)
Chọn hàm Lyapunov sau:
2
1 1 1
1
V e e
2
(6)
Đạo hàm 2 vế (6) có:
1 1 1 1 1 2 d 1
V e e .e e . X z 0; e 0
(7)
Đặt X2d là tín hiệu điều khiển ảo, đảm bảo tiêu chuẩn
ổn định Lyapunov:
2d 1 1 d 1
X C e z ; C 0
(8)
Đặt
2 2 2d
e X X
có:
2 2 2d
1 1 1 d
e X X
1
= cos cos U g C e z
m
(9)
Chọn hàm Lyapunov V2 có dạng:
2
2 1 2 1 2
1
V e ,e V e
2
(10)
Đạo hàm 2 vế (10) có:
2 1 2 2 1 2
2
1 1 1 2 2 1 1 1 d
V V e e 0; e ,e 0
1
=-C e e e e cos cos
θU g C e z
m
(11)
Từ tiêu chuẩn ổn định Lyapunov để đảm bảo hệ thống
ổn định tiệm cận, toàn cục, luật điều khiển có dạng:
2
z 1 1 2 1 1 d 2 2
1
U m e g C e C e z C e
cos cosθ
(12)
Chọn mặt trượt:
z 2 2 1d 1 1
s e X X C e
(13)
z z z 1 z 2 1d 1 1
1 1d 1 1d 1
s k sign(s ) q s X X C e
1
= cos cos
θU g X C X X
m
(14)
Để đảm bảo hệ ổn định và hội tụ cần thỏa mãn điều
kiện
s.s 0
theo đó rút ra luật điều khiển sau:
P-ISSN 1859-3585 E-ISSN 2615-9619 https://jst-haui.vn SCIENCE - TECHNOLOGY
Vol. 60 - No. 11 (Nov 2024) HaUI Journal of Science and Technology 33
f
z z z z
z
1d 1 1d 2
k sign(s ) q s g
1
U m X C X X
cos cosθ
(15)
Với cách làm tương tự sẽ tìm được luật điều khiển cho
các kênh x, y,
θ ψ
, ,
:
f f f f
f
f
f
x x x x x 3d x 3d 4
z
y y y y y 5d y 5d 6
z
z z z z
z
1d 1 1d 2
y z
x
x
7d 2 7d 8
θ θ θ
θ y
1
U m k sign s q s X C X X
U
1
U m k sign s q s X C X X
U
k sign(s ) q s g
1
U m X C X X
cos cosθ
I I
k sign s q s θ I
U I
X C X X
k sign s q
U I
f
z x
θ
y
9d 3 9d 10
ψ z ψ ψ ψ ψ 11d 4 11d 12
I I
s ψ I
X C X X
U I k sign s q s X C X X
(16)
Để đánh giá các đại lượng bất định trong mô hình của
quadrotor ta sử dụng giá trị ước lượng, với kênh điều
khiển ϕ được tính như sau:
1 1 1
2 2 2
ˆ
f f f
ˆ
f f f
ˆ
f f f
(17)
Trong đó:
1 2
ˆ ˆ ˆ
f,f ,f
là giá trị ước lượng;
1 2
f,f ,f
là sai số
ước lượng.
Từ (2) phương trình sai số:
7 8 d
8 y z x 1 2 8d
x
e X
1
e
θψ I I T f θ f θ f X
I
(18)
Từ (17), (18) rút ra luật điều khiển thích nghi cho kênh
ϕ:
y z 2
x 7 7 8 7 7 8 8 1 2
x
I I
ˆ ˆ ˆ
U I ( Z
ψθ C Z C Z C Z f θ f θ f)
I
(19)
Các kênh còn lại được tìm tương tự.
4. MÔ PHỎNG VÀ ĐÁNH GIÁ KẾT QUẢ
4.1. Tham số mô phỏng
UAV có khối lượng m = 1,3kg; g = 9,81m/s2; L = 0,18m;
Ix = Iy = 5,3.10-4kg.m2; Iz = 3,1.10-4kg.m2; Ci = 50; γi = 10;
ki = 0,5; λ = 1; fi = 1.
4.2. Kết quả mô phỏng
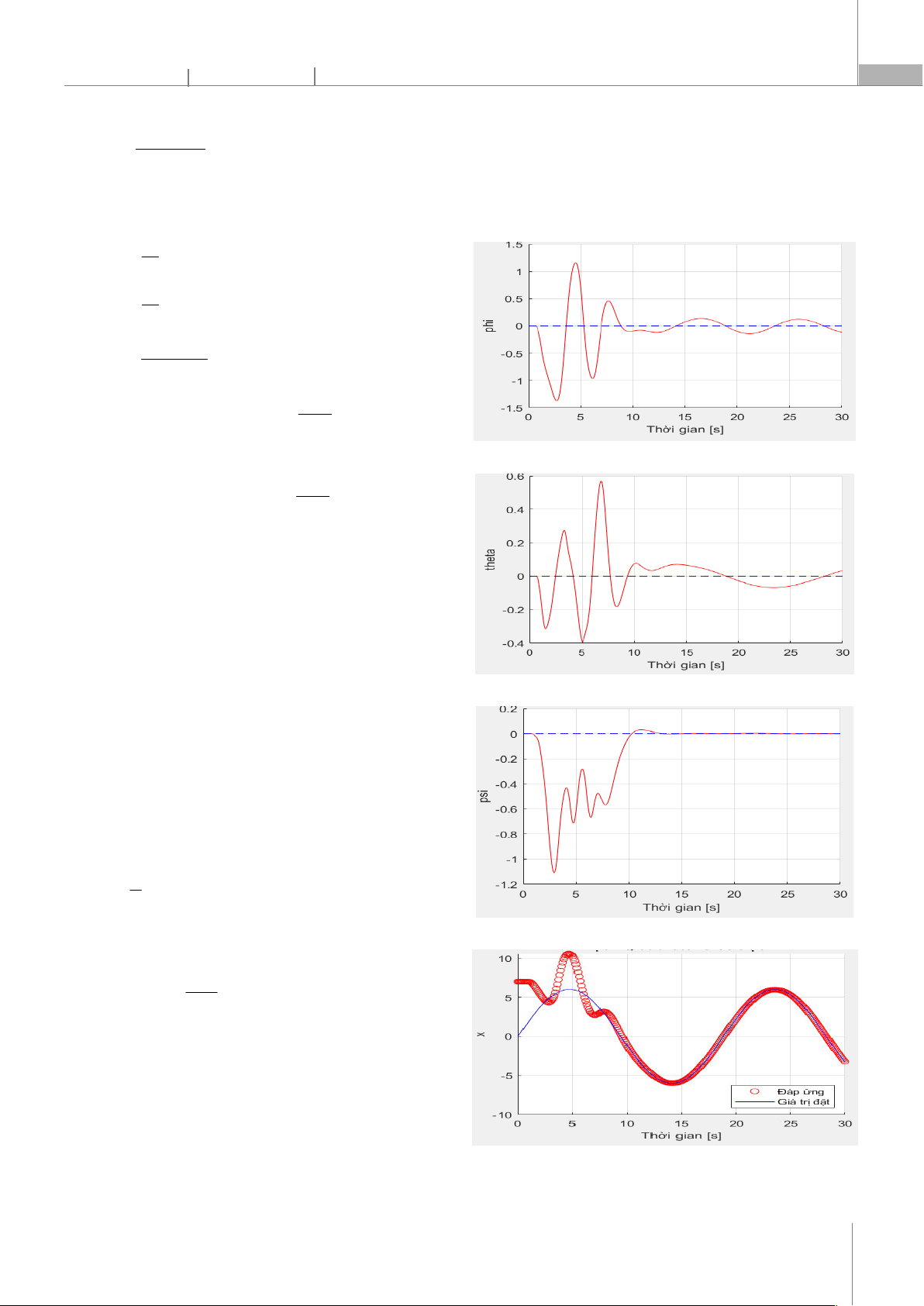
Tiến hành mô phỏng UAV quadrotor cơ động trong cả
3 mặt phẳng xyz, kiểm tra đáp ứng các góc
θ ψ
, ,
, đáp
ứng vị trí của quadrotor so với giá trị đặt. Kết quả mô
phỏng được thể hiện trên hình 2 ÷ 9.
Hình 2. Đáp ứng góc ϕ
Hình 3. Đáp ứng góc θ
Hình 4. Đáp ứng góc ψ
Hình 5. Vị trí quadrotor theo trục x
CÔNG NGHỆ https://jst-haui.vn
Tạp chí Khoa học và Công nghệ Trường Đại học Công nghiệp Hà Nội Tập 60 - Số 11 (11/2024)
34
KHOA H
ỌC
P
-
ISSN 1859
-
3585
E
-
ISSN 2615
-
961
9
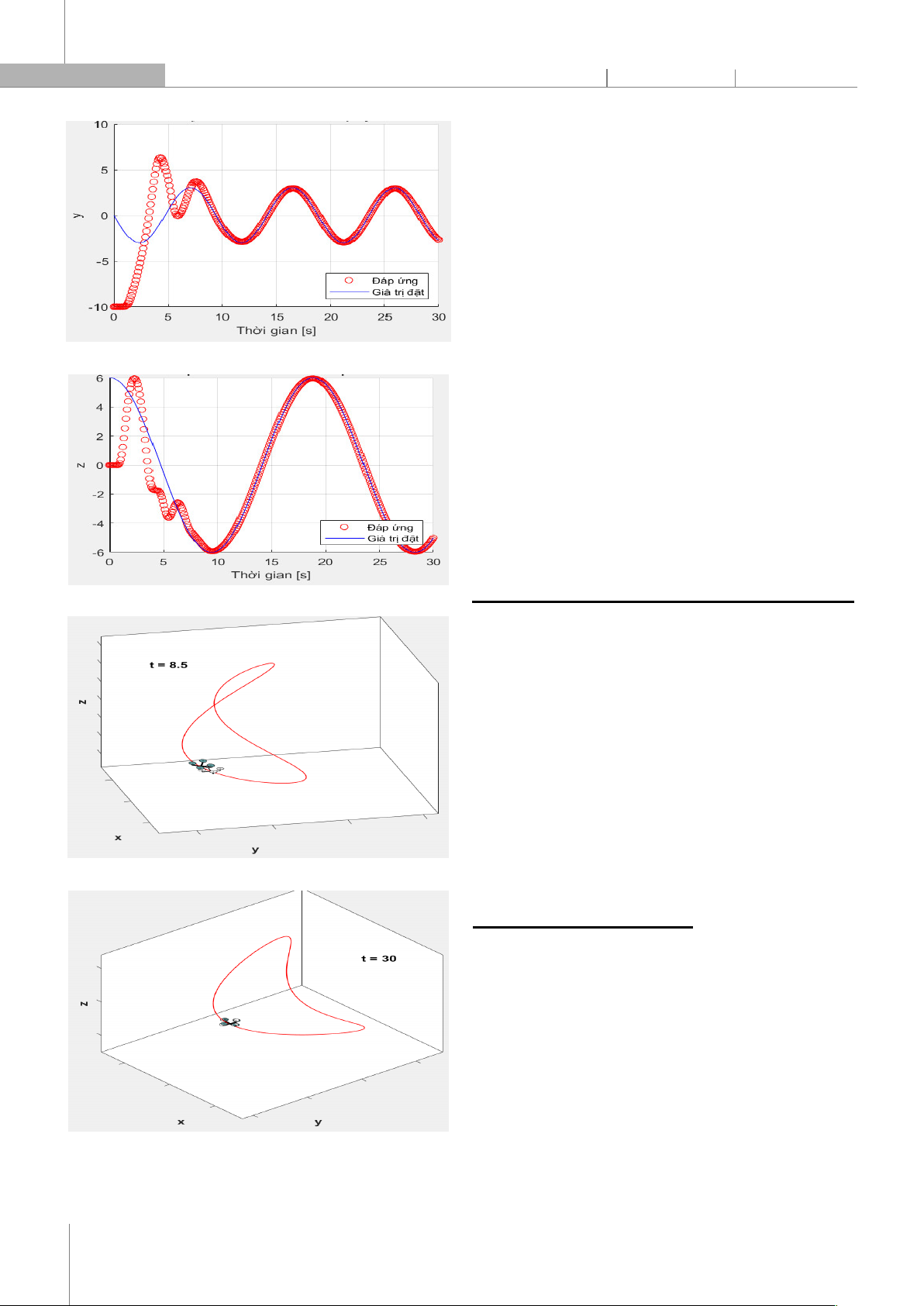
Hình 6. Vị trí quadrotor theo trục y
Hình 7. Vị trí quadrotor theo trục z
Hình 8. Vị trí quadrotor tại thời điểm 8,5s
Hình 9. Vị trí quadrotor tại thời điểm 30s
Nhận xét: Qua kết quả mô phỏng ta thấy, bộ điều
khiển trượt backstepping cho các kênh điều khiển có hiệu
quả tốt trong điều khiển UAV. Thời gian để UAV bám theo
đúng quỹ đạo đặt là 7s, sai số xác lập gần như bằng 0, ổn
đinh, chống nhiễu tốt.
5. KẾT LUẬN
Bài báo đã trình bày kết quả xây dựng bộ điều khiển
trượt backstepping thích nghi cho các kênh điều khiển
của UAV quadrotor. Phần trình bày được bắt đầu từ việc
xây dựng mô hình toán, tổng hợp bộ điều khiển, mô
phỏng bằng phần mềm Matlab-Simulink. Các kết quả
kiểm nghiệm cho thấy:
- Thứ nhất, việc sử dụng bộ điều khiển trượt
backstepping thích nghi làm tăng tính ổn định của hệ
thống, đảm bảo độ chính xác trong điều khiển.
- Thứ hai, phương pháp này đã giúp giảm tối đa sai số
và hiện tượng dao động, trong điều kiện hệ thống chịu
ảnh hưởng của các yếu tố phi tuyến, bất định của mô hình
và nhiễu loạn khí động học trong quá trình bay.
TÀI LIỆU THAM KHẢO
[1] S. Raafat, F. Raheem, A. Alawsi, Z. Mahmood, "Applica tion and Control
of Quadrotors," Earth Systems Protection and Sustainability, 241-264, 2022.
[2]. S. H. Derrouaoui, Y. Bouzid, A. Belmouhoub, M. Guiatni, H.
Siguerdidjane, "Recent Developments and Trends in Unconventional UAVs
Control: A Review," J Int Rob Syst, 109, 68, 2023.
[3]. H. Hassani, A. Mansouri, A. Ahaitouf, "Backstepping based super
twisting sliding mode attitude control for a quadrotor aircraft subjected to
wind disturbances: Experimental validation," Int. J. Dyn. Control, 11, 1285-
1296, 2023.
[4]. J. Pan, B. Shao, J. Xiong, Q. Zhang, "Attitude Control of Quadrotor
UAVs Based on Adaptive Sliding Mode," Inter. J. Cont, Auto. Syst, 21, 8, 2698-
2707, 2023.
AUTHORS INFORMATION
Dang Tien Trung, Pham Thi Thanh Dam
Electric Power University, Vietnam

















![Bài giảng Vi điều khiển Nguyễn Huy Hoàng: Tổng hợp kiến thức [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260316/hoatrami2026/135x160/72211773806757.jpg)






![Bài giảng Tự động hoá thiết bị điện [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260312/hoabattu2026/135x160/61691773631881.jpg)
