
L i nói đ uờ ầ
Ngày nay vi c ng d ng vi đi u khi n, vi x lý đang ngày càng phát tri nệ ứ ụ ề ể ử ể
r ng rãi và thâm nh p ngày càng nhi u vào các lĩnh v c k thu t và đ i s ng xãộ ậ ề ự ỹ ậ ờ ố
h i. V i xu h ng t t y u này cùng v i s phát tri n m nh m c a công nghộ ớ ướ ấ ế ớ ự ể ạ ẽ ủ ệ
ch t o, ng i ta đã t o nh ng vi đi u khi n có c u trúc m nh h n, đáp ngế ạ ườ ạ ữ ề ể ấ ạ ơ ứ
th i gian th c t t h n, chu n hóa h n so v i các vi đi u khi n 8 bit tr c đây.ờ ự ố ơ ẩ ơ ớ ề ể ướ
V i s phát tri n m nh m c a khoa h c, đ c bi t là ngành đi n, đi n t , sớ ự ể ạ ẽ ủ ọ ặ ệ ệ ệ ử ự
phát minh ra các linh ki n đi n t đã và đang ngày càng đáp ng đ c yêu c uệ ệ ử ứ ượ ầ
c a các h th ng. u đi m c a vi c s d ng các linh ki n đi n t làm cho cácủ ệ ố Ư ể ủ ệ ử ụ ệ ệ ử
h th ng linh ho t và đa d ng h n, giá thành th p h n và đ chính xác cao h n.ệ ố ạ ạ ơ ấ ơ ộ ơ
Sau th i gian h c t p và tìm hi u, chúng em đã đ c làm quen v i môn h c viờ ọ ậ ể ượ ớ ọ
x lý và đo l ng h th ng. Đ áp d ng lý thuy t v i th c t c a môn h c nàyử ườ ệ ố ể ụ ế ớ ự ế ủ ọ
chúng em nh n bài t p l n :'' ậ ậ ớ Thi t k m ch mô ph ng đo và hi n th t c đế ế ạ ỏ ể ị ố ộ
đ ng c ( có g nộ ơ ắ s n encoder)ẵ”.
Tuy nhiên do ki n th c còn h n ch , tài li u tham kh o có gi i h n nên cònế ứ ạ ế ệ ả ớ ạ
có nh ng sai sót. Chúng em r t mong th y, cô giáo thông c m và giúp đ chúngữ ấ ầ ả ỡ
em hoàn thi n bài t p l n này.ệ ậ ớ
Chúng em xin chân thành c m n!ả ơ
Ch ng 1: MÔ PH NG CÔNG NGHươ Ỏ Ệ
I. GI I THI U V H VI ĐI U KHI N 8051Ớ Ệ Ề Ọ Ề Ể
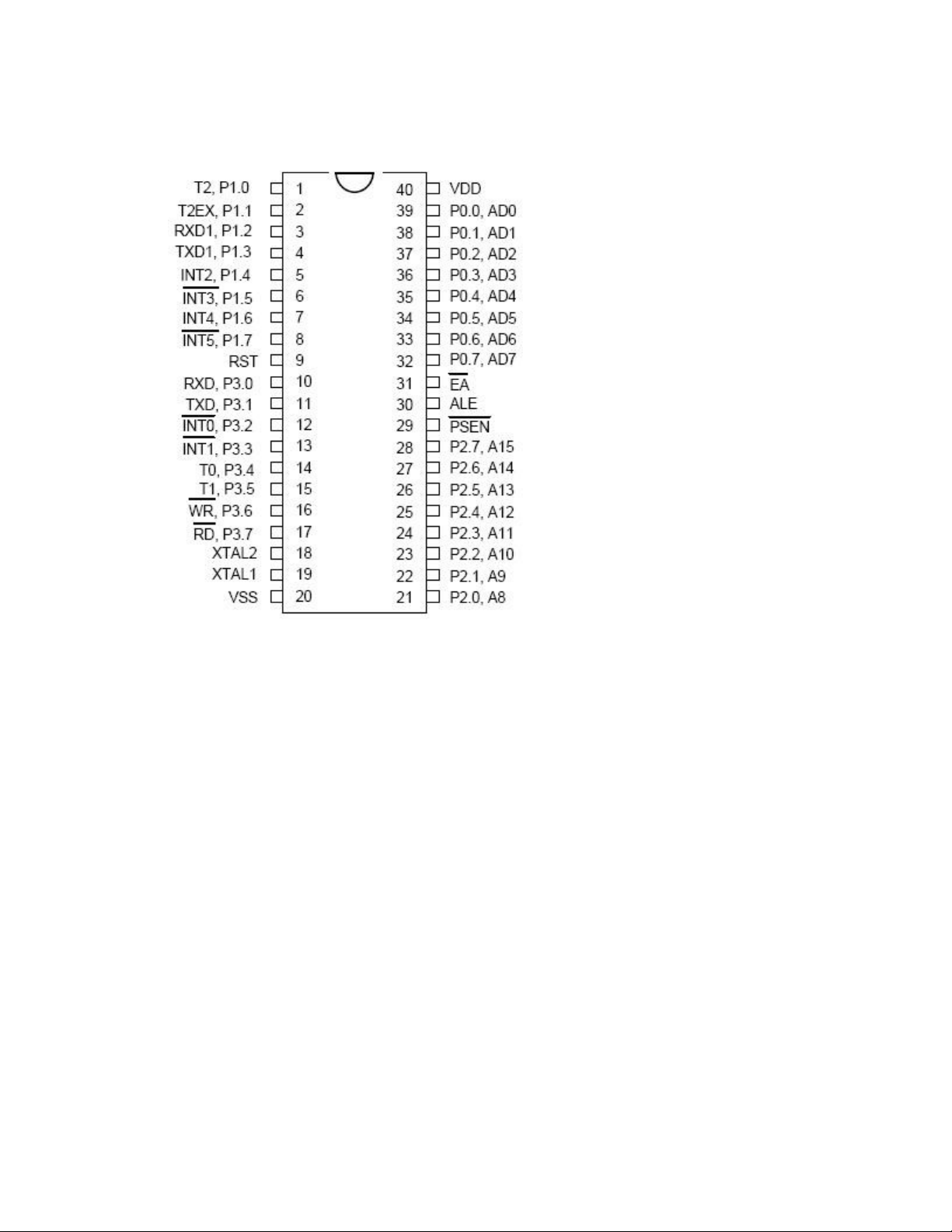
B vi đi u khi n 8 bit AT89ộ ề ể S51 ho t đ ng t n s 12 MHz, v i b nhạ ộ ở ầ ố ớ ộ ớ
ROM 4kbyte, b nh RAM 128 byte c trú bên trong và có th m r ng b nhộ ớ ư ể ở ộ ộ ớ
ra ngoài. b vi đi u khi n này còn có 4 c ng 8 bit (P0,P1,P2,P3) vào/ra 2Ở ộ ề ể ổ
chi u đ giao ti p v i thi t b ngo i vi. Ngoài ra, nó còn có:ề ể ế ớ ế ị ạ
−2 b đ nh th i 16 bit (Time 0 và Time 1)ộ ị ờ
−M ch giao ti p n i ti pạ ế ố ế
−B x lý bitộ ử
−H th ng đi u khi n và x lý ng tệ ố ề ể ử ắ
−Các kênh đi u khi n/ d li u/ đ a ch .ề ể ữ ệ ị ỉ
−CPU
−Các thanh ghi ch c năng đ c bi t (SFR)ứ ặ ệ
Ch c năng c a các chân tín hi u nh sau:ứ ủ ệ ư
−P0.0 đ n P0.7 là các chân c a c ng 0ế ủ ổ
−P1.0 đ n P1.7 là các chân c a c ng 1ế ủ ổ
−P2.0 đ n P2.7 là các chân c a c ng 2ế ủ ổ
−P3.0 đ n P3.7 là các chân c a c ng 3ế ủ ổ
−RxD : nh n tín hi u ki u n i ti pậ ệ ể ố ế
−TxD : truy n tín hi u ki u n i ti pề ệ ể ố ế

−INT0: ng t ngoài 0ắ
−INT1: ng t ngoài 1ắ
−T0: chân vào 0 c a b Timer/Counter 0ủ ộ
−T1: chân vào 1 c a b Timer/Counter 1ủ ộ
−Wr: ghi d li u vào b nh ngoàiữ ệ ộ ớ
−RST: chân vào Reset, tích c c m c logic cao trong kho ng 2 chu kỳ máyự ở ứ ả
−XTAL1: chân vào m ch khu ch đ i dao đ ngạ ế ạ ộ
−XTAL2: chân ra t m ch khu ch đ i dao đ ngừ ạ ế ạ ộ
−PSEN: chân cho phép đ c b nh ch ng trình ngoàiọ ộ ớ ươ
−ALE: chân tín hi u cho phép ch t đ a ch đ truy c p b nh ngoài, khi Onệ ố ị ỉ ể ậ ộ ớ
– chip xu t ra byte th p c a đ a ch . Nó có th đ c dùng cho các bấ ấ ủ ị ỉ ể ượ ộ
Timer ngoài ho c cho m c đích t o xung Clock.ặ ụ ạ
−EA/Vpp: cho phép On – chip truy c p b nh ch ng trình ngoài khiậ ộ ớ ươ
EA=0, n u EA=1 thì On-chip s làm vi c v i b nh ch ng trình n i trú.ế ẽ ệ ớ ộ ớ ươ ộ
−VCC : cung c p ngu n cho On-chipấ ồ
−GND: n i mátố
Các thanh ghi ch c năng đ c bi t khác:ứ ặ ệ
Các thanh ghi ch c năng đ c bi t là các thanh ghi đ m nhi m các ch c năngứ ặ ệ ả ệ ứ
khác nhau trong chíp. Chúng n m RAM bên trong chíp chi m vùng không gianằ ở ế
b nh 128bytes đ c đ nh đ a ch t 80h đ n Ffh.ộ ớ ượ ị ị ỉ ừ ế
−Thanh ghi tích lũy (ACC):
đây là thanh ghi quan tr ng trong chip, dùng đ l u tr các toán h ng và k t quọ ể ư ữ ạ ế ả
c a phép tính. Thanh ghi ACC dài 8 bit, có đ a ch là E0h trong SFR.ủ ị ỉ
−Thanh ghi B:
thanh ghi th ng s d ng khi th c hi n các phép toán nhân, chia. Đ i v i cácườ ử ụ ự ệ ố ớ
l nh khác, thanh ghi B có th xem nh là thanh ghi đ m t m th i. Trong SFRệ ể ư ệ ạ ờ
thanh ghi B dài 8 bits và có đ a ch là F0h.ị ỉ
−Con tr ngăn x p:ỏ ế
thanh ghi này dài 8 bits, có đ a ch trong SFR là 81h, giá tr c a nó đ c tăng tị ỉ ị ủ ượ ự
đ ng tr c khi th c hi n các l nh CALL, PUSH. Ngăn x p có th đ t b t cộ ướ ự ệ ệ ế ể ặ ấ ứ
n i nào trong RAM c a chíp, nh ng sau khi kh i đ ng l i ngăn x p thì con trơ ủ ư ở ộ ạ ế ỏ
ngăn x p m c đ nh s tr t i đ a ch kh i đ u là 07h, v y ngăn x p s đ cế ặ ị ẽ ỏ ớ ị ỉ ở ầ ậ ế ẽ ượ
t o ra b t đ u t 08h.ạ ắ ầ ừ
−Con tr d li u :ỏ ữ ệ
là thanh ghi dài 16 bits, g m hai thanh dài 8 bits h p l i là thanh ghi byte caoồ ợ ạ
DPH và thanh ghi byte th p DPL. Con tr d li u có th s d ng nh là thanhấ ỏ ữ ệ ể ử ụ ư
ghi 16 bits ho c hai thanh ghi 8 bits đ c l p. Trong SFR thanh ghi DPH có đ a chặ ộ ậ ị ỉ
là 83h, còn thanh ghi DPL có đ a ch là 82h.ị ỉ
−Thanh ghi PSW:
là thanh ghi dài 8 bits, có đ a ch trong SFR là D0h. Thanh ghi PSW dùng đ ch aị ỉ ể ứ

thông tin v tr ng thái ch ng trình. M i bit c a PSW đ m nhi m m t ch cề ạ ươ ỗ ủ ả ệ ộ ứ
năng c th . Thanh ghi này đ c phép truy c p d ng m c bit.ụ ể ượ ậ ở ạ ứ
−Thanh ghi PCON : thanh ghi đi u khi n ngu n.ề ể ồ
−Thanh ghi IE: thanh ghi cho phép ng tắ
EA : n u EA=0 không cho phép b t c ng t nào ho t đ ng. N u EA=1 m iế ấ ứ ắ ạ ộ ế ỗ
ngu n ng t riêng bi t đ c phép ho c không đ c phép ho t đ ng b ng cáchồ ắ ệ ượ ặ ượ ạ ộ ằ
đ t ho c xóa bit Enable c a nó.ặ ặ ủ
•ET2 : bit cho phép ho c không cho phép ng t b Timer 2ặ ắ ộ
•ET1 : bit cho phép ho c không cho phép ng t tràn b Timer 1ặ ắ ộ
•EX1 : bit cho phép ho c không cho phép ng t ngoài 1ặ ắ
•ET0 : bit cho phép ho c không cho phép ng t tràn b Timer 0ặ ắ ộ
•EX1 : bit cho phép ho c không cho phép ng t ngoài 0ặ ắ
−Thanh ghi IP : thanh ghi u tiên ng tư ắ
−Thanh ghi TCON: thanh ghi đi u khi n b Timer/Counterề ể ộ
•TF1: c tràn Timer1ờ
•TR1 : bit đi u khi n b Timer 1 ho t đ ngề ể ộ ạ ộ
•TF0 : c tràn Timer0ờ
•TR0 : bit đi u khi n b Timer 0 ho t đ ngề ể ộ ạ ộ
•IE1 : c ng t ngoài 1ờ ắ
•IE0 : c ng t ngoài 0ờ ắ
−Thanh ghi TMOD: Thanh ghi đi u khi n Timer/Counter GATE: ề ể
•Khi TRx đ c thi t l p và GATE = 1, b Timer/Counter làm vi c chượ ế ậ ộ ệ ỉ
khi chân INTx m c caoở ứ
•Khi GATE= 0, Timer/Counterx s ho t đ ng ch khi TRx=1ẽ ạ ộ ỉ
•C/T : bit này cho phép ch n ch c năng là Timer hay Counter.ọ ứ
•M0,M1 : bit ch n Mode, đ xác đ nh tr ng thái và ki u Timer/Counter.ọ ể ị ạ ể
−Thanh ghi SCON : là thanh ghi tr ng thái và đi u khi n c ng n i ti p.ạ ề ể ổ ố ế

II. GI I THI U V ENCODERỚ Ệ Ề
Nhìn trên hình ta th y encoder g m: 1 t m tròn có kh c l , 1 H thôngấ ồ ấ ắ ỗ ệ
LED phát và thu.
C u t o chính c a encoderấ ạ ủ :
G m 1 b phát ánh sáng ( led phát ), m t b thu ánh sáng nh y t ánh sángồ ộ ộ ộ ạ ừ
nh y t ánh sáng c a b phát (b thu th ng là photodiotde ho cạ ừ ủ ộ ộ ườ ặ
phototransistor) 1 hay 2 đĩa quang g n trên tr c quay đ t gi a b phát và thu,ắ ụ ặ ữ ộ
thông th ng tr c quay này s đ c g n v i tr c quay c a đ i t ng c n đoườ ụ ẻ ượ ắ ớ ụ ủ ố ượ ầ
t c đ .ố ộ
Nguyên t c ho t đ ng :ắ ạ ộ
Nguyên lý c b n c a encoder : đó là m t đĩa tròn xoay, quay quanh tr c. Trênơ ả ủ ộ ụ
đĩa có các l (rãnh). Ng i ta dùng m t đèn led đ chi u lên m t đĩa. Khi đĩaỗ ườ ộ ể ế ặ
quay, ch không có l (rãnh), đèn led không chi u xuyên qua đ c, ch có lỗ ỗ ế ượ ỗ ỗ
(rãnh), đèn led s chi u xuyên qua. Khi đó, phía m t bên kia c a đĩa, ng i taẽ ế ặ ủ ườ
đ t m t con m t thu. V i các tín hi u có, ho c không có ánh sáng chi u qua,ặ ộ ắ ớ ệ ặ ế
ng i ta ghi nh n đ c đèn led có chi u qua l hay không.S xung đ m đ cườ ậ ượ ế ỗ ố ế ượ
và tăng lên nó tính b ng s l n ánh sáng b c t.ằ ố ầ ị ắ
Nh v y là encoder s t o ra các tín hi u xung vuông và các tín hi u xungư ậ ẽ ạ ệ ệ
vuông này đ c c t t ánh sáng xuyên qua l . Nên t n s c a xung đ u ra sượ ắ ừ ỗ ầ ố ủ ầ ẽ
ph thu c vào t c đ quay c a t m tròn đó. ng d ng c a encoder : trong cácụ ộ ố ộ ủ ấ Ứ ụ ủ
bài toán đo t c đ đ ng c , trong các máy CNC dùng đ xác đ nh kho ng d chố ộ ộ ơ ể ị ả ị
chuy n c a 1 đ i t ng thôngể ủ ố ượ thông qua đ m s vòng c a tr c.ế ố ủ ụ
III. GI I THI U V LED 7 ĐO NỚ Ệ Ề Ạ

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)