NGHIÊN C U Đ XU T B ĐI U KHI N CHUY N Đ NG N Đ NH C A Ô TÔỨ Ề Ấ Ộ Ề Ể Ể Ộ Ổ Ị Ủ
Nguy n Thành Côngễ(1), Đào M nh Hùngạ(1), H H u H iồ ữ ả (2)
(1) Tr ng Đ i h c Giao thông V n t i, (2)Tr ng Đ i h c Bách Khoa Hà N iườ ạ ọ ậ ả ườ ạ ọ ộ
Tóm t t:ắ Bài báo đ xu t b đi u khi n logic m đi u khi n chuy n đ ng n đ nhề ấ ộ ề ể ờ ề ể ể ộ ổ ị
c a ô tô thông qua vi c phân ph i l c phanh t i m i bánh xe. D a vào t c đ góc xoay thânủ ệ ố ự ạ ỗ ự ố ộ
xe th c t đ c cung c p b i c m bi n b đi u khi n s so sánh v i v i giá tr mongự ế ượ ấ ở ả ế ộ ề ể ẽ ớ ớ ị
mu n. Thông qua tín hi u sai l ch này, b ch p hành s th c hi n phanh t i bánh xe đi uố ệ ệ ộ ấ ẽ ự ệ ạ ề
ch nh qu đ o chuy n đ ng c a ô tô g n v i mong mu n. H th ng đ c mô ph ng khi ôỉ ỹ ạ ể ộ ủ ầ ớ ố ệ ố ượ ỏ
tô th c hi n chuy n làn, tín hi u đi u khi n vành lái d ng hình Sin. Đánh giá tác đ ng c aự ệ ể ệ ề ể ạ ộ ủ
b đi u khi n quá trình mô ph ng đ c th c hi n khi có và không có tác đ ng c a b đi uộ ề ể ỏ ượ ự ệ ộ ủ ộ ề
khi n v i các v n t c khác nhau. ể ớ ậ ố
I. Đ t v n đ ặ ấ ề
Nghiên c u qu đ o chuy n đ ngứ ỹ ạ ể ộ
c a ô tô là v n đ r t ph c t p. Khi ô tôủ ấ ề ấ ứ ạ
chuy n đ ng trên đ ng v i t c đ caoể ộ ườ ớ ố ộ
có th x y ra quay vòng không theo quể ả ỹ
đ o ng i đi u khi n mong mu n làmạ ườ ề ể ố
m t n đ nh d n t i nh ng tai n n đángấ ổ ị ẫ ớ ữ ạ
ti c. Các nghiên c u g n đây cho th yế ứ ầ ấ
đi u khi n mô men xoay thân xe làề ể
ph ng pháp hi u qu đ c i thi n tínhươ ệ ả ể ả ệ
chuy n đ ng n đ nh c a ô tô. Ph ngể ộ ổ ị ủ ươ
pháp này t p trung vào đi u khi n v nậ ề ể ậ
t c góc xoay thân xe. Khi m t n đ nh hố ấ ổ ị ệ
th ng đi u khi n s đ a ra tín hi u đi uố ề ể ẽ ư ệ ề
ch nh mô men xoay thân xe b ng cáchỉ ằ
phân ph i l c phanh ho c đi u khi n l cố ự ặ ề ể ự
kéo đ gi ô tô chuy n đ ng n đ nh. ể ữ ể ộ ổ ị
Trong bài này, tác gi đ a ra bả ư ộ
đi u khi n logic m đ đi u khi nề ể ờ ể ề ể
chuy n đ ng c a ô tô thông qua vi cể ộ ủ ệ
phân ph i l c phanh t i m i bánh xe.ố ự ạ ỗ
Đi u khi n m s d ng các k năng c aề ể ờ ử ụ ỹ ủ
ng i đi u khi n có kinh nghi m ho cườ ề ể ệ ặ
các tri th c chuyên gia, có th s d ngứ ể ử ụ
các tiêu chí đ c mô t b ng ngôn ngượ ả ằ ữ
ho c không đ nh nghĩa đ c rõ ràng. Vìặ ị ượ
th , đi u khi n m th ng đ c dùngế ề ể ờ ườ ượ
khi ti n trình đi u khi n không đ c bi tế ề ể ượ ế
rõ ho c khó mô t chính xác vì quá ph cặ ả ứ
t p ch ng h n. ạ ẳ ạ
II.Tr ng thái chuy n đ ng và đ xu tạ ể ộ ề ấ
b đi u khi nộ ề ể
2.1 Các tr ng thái quay vòng c a ô tôạ ủ
Đi u ki n đ các bánh xe d nề ệ ể ẫ
h ng v i h th ng lái 2WS không bướ ớ ệ ố ị
tr t bên khi xe quay vòng tho mãn:ượ ả
t2 t1
L
Cotg Cotg B
β − β =
(1)
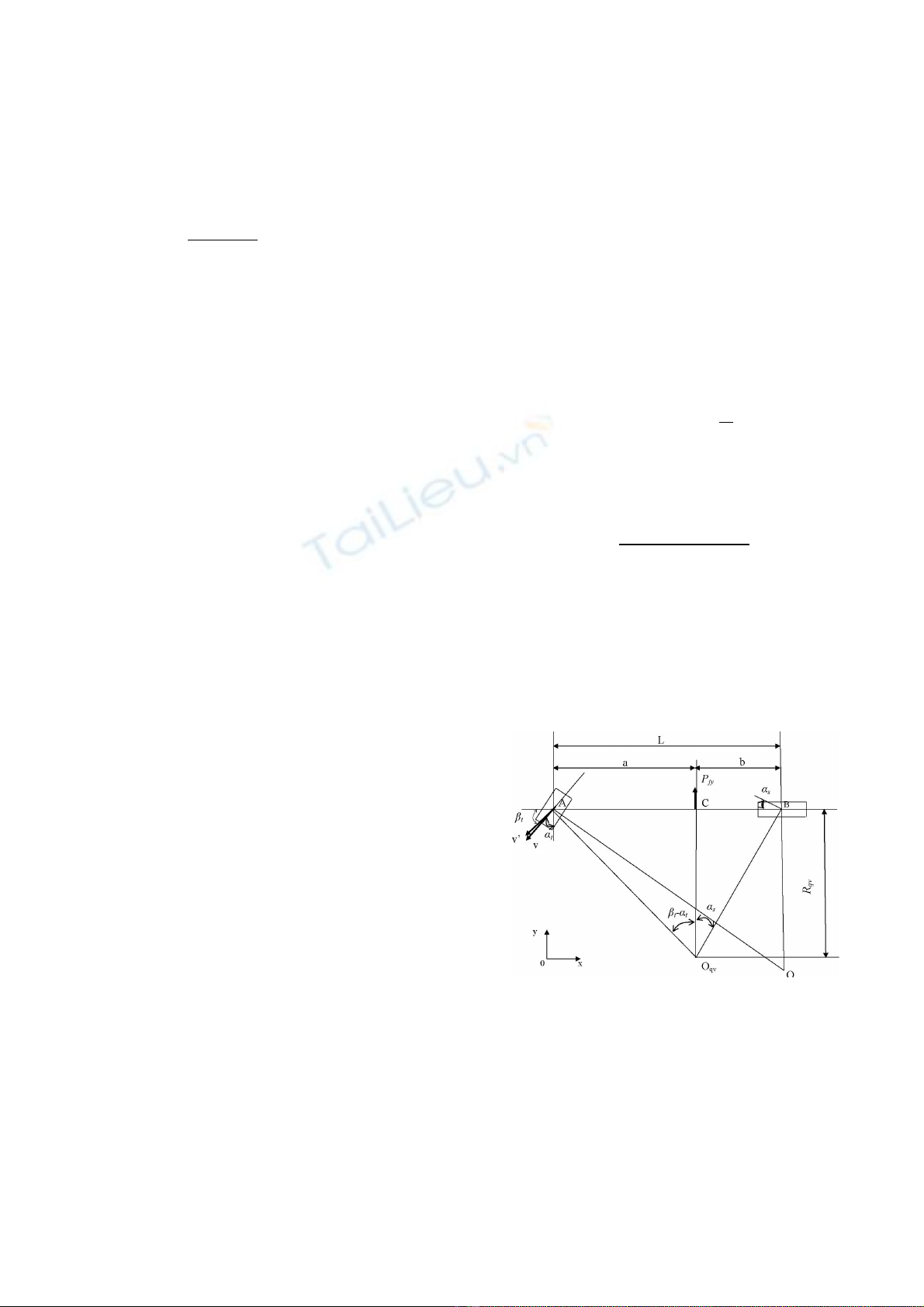
Khi ô tô quay vòng v i v n t cớ ậ ố
không đ i bán kính quay vòng ổRqv đ cượ
xác đ nhị t s đ (hình 1) nh sau:ừ ơ ồ ư
qv
t t s
L
Rtg( ) tg
=β −α + α
(2)
Trong đó: L-chi u dài c s c a ôề ơ ở ủ
tô [m]; βt- góc quay bánh xe d nẫ
h ng[rad]; αướ t-góc bi n d ng bên c aế ạ ủ
c u tr c [rad]; αầ ướ s- góc bi n d ng bênế ạ
c a c u sau[rad].ủ ầ
N u xe quay vòng v i βế ớ t nh thì taỏ
có th coi: tg(βểt-αt) ≈βt-αt; tgαs ≈αs
Hình 1. Xác đ nh bán kính quay vòng theoị
L, β, αt, αs
- Khi ( αt -αs ) = 0 là trạng thái quay
vòng đúng. Bán kính quay vòng không
phụ thuộc vào gia tốc bên (Rqv = const).
- Khi ( αt -αs ) < 0 là tr ng tháiạ
quay vòng thi u. Khi đó bán kính quayế
vòng tăng, đ th c hi n quay vòng theoể ự ệ
bán kính R thì ng i lái ph i tăng gócườ ả
quay vành lái m t l ng Δβộ ượ vl.
1

Hình 4 S đ mô ph ng kh i đi u khi n mơ ồ ỏ ố ề ể ờ
- Khi ( αt -αs ) > 0 là tr ng thái quayạ
vòng th a.ừ Khi đó bán kính quay vòng
gi m, l c ly tâm gia tăng. Đ kh c ph cả ự ể ắ ụ
ng i lái ph i gi m góc quay vành láiườ ả ả
m t l ng Δβộ ượ vl .
2.2.C u trúc b đi u khi nấ ộ ề ể
C u trúc b đi u khi n đ c thấ ộ ề ể ượ ể
hi n hình 2. ệ ở
T các tín hi u đ u vào: t c đ ôừ ệ ầ ố ộ
tô, góc quay vành lái, kh i Referenceố
Model s xác đ nh t c đ góc quay thânẽ ị ố ộ
xe mong mu n. Bi u th c xác đ nh t c đố ể ứ ị ố ộ
góc quay thân xe mong mu n nh sau [7]:ố ư
m m 2
r r f f
f r
v
rm.v (l C l C )
L2C C L
α α
α α
= ε = δ
−
+
&
(3)
Trong đó: v – v n t c c a ô tô [m/s];ậ ố ủ
δ
- góc quay c a bánh xe d n h ngủ ẫ ướ
[rad]; m - kh i l ng c a ô tô [kg]; lố ượ ủ f, lr -
kho ng cách t tr ng tâm ô tô t i tâm c uả ừ ọ ớ ầ
tr c, c u sau [m]; Cướ ầ αf, Cαr - Đ c ng bênộ ứ
c a l p tr c, sau [N/rad]ủ ố ướ
T t c đ góc xoay thân xe th cừ ố ộ ự
t đ c đo b i c m bi n. B đi u khi nế ượ ở ả ế ộ ề ể
so sánh v i giá tr mong mu n. Qua tínớ ị ố
hi u sai l ch này xác đ nh giá tr mômenệ ệ ị ị
xoay thân xe. T đó b ch p hành s th cừ ộ ấ ẽ ự
hi n phanh t i bánh xe đ đi u ch nh quệ ạ ể ề ỉ ỹ
đ o chuy n đ ng c a ô tô. ạ ể ộ ủ
Khi xe quay vòng th a ừ(hình 3-a)
xe đ c n đ nh b ng cách tăng l c bên ượ ổ ị ằ ự ở
bánh xe tr c phía ngoài t o ra mô menướ ạ
ng c chi u v i mô men gây ra quayượ ề ớ
vòng th a. L c phanh tác d ng lên bánhừ ự ụ
xe phía tr c cũng làm gi m t c đ c aướ ả ố ộ ủ
xe, vì th tính n đ nh c a xe đ c đ mế ổ ị ủ ượ ả
b o.ả
Khi xe quay vòng thi uế (hình 3-b)
xe đ c n đ nh b ng cách tác d ngượ ổ ị ằ ụ
phanh bánh sau bên trong. Vì th môở ế
men quay vòng s tăng, ô tô chuy n đ ngẽ ể ộ
n đ nh.ổ ị
a)Xe quay vòng th aừb)Xe quay vòng thi uế
FB- L c phanh; FựS- L c bênự
Hình 3 Tr ng thái chuy n đ ng c a ô tôạ ể ộ ủ
khi có đi u khi n và không đi u khi nề ể ề ể
2.3.Xây d ng b đi u khi n mự ộ ề ể ờ
S đ đi u khi n m nh trên hìnhơ ồ ề ể ờ ư
4.
Bi n vào t ng t ng ng c a bế ươ ươ ứ ủ ộ
đi u khi n nh sau:ề ể ư
- dr: Sai l ch v n t c góc xoay thânệ ậ ố
xe, đánh giá sai l ch gi a giá tr th cệ ữ ị ự
t (đo t c m bi n) và giá tr mong mu nế ừ ả ế ị ố
(xác đ nh t bi u th c 3). ị ừ ể ứ
-ddr: Đ bi n thiên sai l ch v n t cộ ế ệ ậ ố
góc xoay thân xe. Đ c xác đ nh t giá trượ ị ừ ị
sai l ch v n t c góc xoay thân xe t i th iệ ậ ố ạ ờ
đi m tính toán v i giá tr sai l ch v n t cể ớ ị ệ ậ ố
xoay thân xe th i đi m tr c đó, trongờ ể ướ
kho ng th i gian tr 0,005 (s).ả ờ ễ
Bi n vào đ c đ nh l ng b ng 3 giá trế ượ ị ượ ằ ị
ngôn ng (hình 5a): “Âm”, ký hi u Nữ ệ
(Negative),“Không“, ký hi u Z (Zero),ệ
“D ng“, ký hi u P (Positive).ươ ệ
Bi n ra đ c đ nh nghĩa là mô menế ượ ị
xoay thân xe (ký hi u Mz). Đ c đ nhệ ượ ị
2
V x
d e lta
r _ m
R e f e re n c e m o d e l
M T T
M T P
M S T
M S P
d e lt a
e x i _ d
M o h in h o t o
d r M z
B o d ie u k h ie n m o
M z
M T T
M T P
M S T
M S P
B o c h a p h a n h
2
d e lta
1
V x
Hình 2 C u trúc b đi u khi nấ ộ ề ể .
ddr
1
Mz
z
1
Un it D e la y
S a tura tio n 1S atu ra tio n
-K -
K 3
-K -
K 2
-K -
K 1
Fuzzy Logi c
Controller
Add
1
dr

nghĩa b ng 5 giá tr ngôn ng (hìnhằ ị ữ
5b):“Âm l n”, ký hi u NL (Negativeớ ệ
Large),“Âm nh ”, ký hi u NS (Negativeỏ ệ
Small), “Không”, ký hi u Zệ
(Zero),“D ng nh ”, ký hi u PS (Positiveươ ỏ ệ
Small),“D ng l n”, ký hi u PL (Positiveươ ớ ệ
Large).
a)Sai l ch, đ bi n thiên sai l ch v n t c góc xoayệ ộ ế ệ ậ ố
thân xe
b) Mô men xoay thân xe
Hình 5 Các hàm quan h giá tr ngôn ngệ ị ữ
bi n vào/ra b đi u khi n m ế ộ ề ể ờ
Xây d ng t p lu t đi u khi nự ậ ậ ề ể
T p lu t đi u khi n m đ c xâyậ ậ ề ể ờ ượ
d ng trên c s nguyên lý đi u khi n c aự ơ ở ề ể ủ
mô hình k t h p v i tri th c các chuyênế ợ ớ ứ
gia, theo tiêu chí nâng cao chuy n đ ngể ộ
n đ nh c a ô tô, g m 9 lu t th hi nổ ị ủ ồ ậ ể ệ
trong b ng 1.ả
B ng 1 T p lu t đi u khi n c a b đi uả ậ ậ ề ể ủ ộ ề
khi n mể ờ
III. K t qu mô ph ngế ả ỏ
Khi ô tô chuy n làn v i v n t cể ớ ậ ố
chuy n đ ng 20 m/s. Đi u khi n vành láiể ộ ề ể
d ng hình Sin v i biên đ đánh lái 150ạ ớ ộ 0
(hình 6).
Mô hình mô ph ng qu đ oỏ ỹ ạ
chuy n đ ng ô tô xây d ng trên ph nể ộ ự ầ
m m Matlab-Simulink [3]. Các thông sề ố
k thu t c a ô tô đ c cho trong b ng 2ỹ ậ ủ ượ ả .
B đi u khi n logic m đ c t ng h pộ ề ể ờ ượ ổ ợ
b ng công c fuzzy logic toolbox c aằ ụ ủ
Matlab.
0 0.5 1 1.5 2 2.5 3 3.5 4
-200
-150
-100
-50
0
50
100
150
200
Thoi gian (s)
Bien do (do)
150
Hình 6 Tín hi u góc quay vành láiệ
B ng 2 Thông s k thu t c a ô tô kh oả ố ỹ ậ ủ ả
sát
STT Thông sốKý
hi uệGiá trịĐ nơ
vị
1Kh i l ng toànố ượ
b xeộm 1006 kg
2
Mô men quán
tính c a kh iủ ố
l ng đ c treoượ ượ Isy 1500 kg.m2
3
Kho ng cách tả ừ
tr ng tâm kh iọ ố
l ng đ c treoượ ượ
đ n tâm c uế ầ
tr cướ
a 0.8839 m
4
Kho ng cách tả ừ
tr ng tâm kh iọ ố
l ng đ c treoượ ượ
đ n tâm c u sauế ầ
b 1.4261 m
5Đ c ng bên c aộ ứ ủ
l p tr c, sauố ướ Cαf,
Cαr
30000 N/rad
K t qu mô ph ng th hi n trênế ả ỏ ể ệ
hình 7, đánh giá tác đ ng c a b đi uộ ủ ộ ề
khi n, khi có và không có tác đ ng c aể ộ ủ
b đ u khi n. ộ ề ể
0 0.5 1 1.5 2 2.5 3 3.5 4
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Thoi gian (s)
Van toc goc xoay than xe (rad/s)
Co dieu khien
Mong muon
Khong dieu khien
a. V n t c góc xoay thân xeậ ố
3

0 0.5 1 1.5 2 2.5 3 3.5 4
-0.05
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
Thoi gian (s)
Goc xoay than xe (rad)
Co dieu khien
Mong muon
Khong dieu khien
b. Góc xoay thân xe
0 10 20 30 40 50 60 70 80
-1
0
1
2
3
4
5
6
X (m)
Y (m)
Co dieu khien
Khong dieu khien
c. Qu đ o chuy n đ ngỹ ạ ể ộ
Hình 7 K t qu mô ph ng chuy n đ ngế ả ỏ ể ộ
K t qu cho th y khi ô tô chuy nế ả ấ ể
làn: tr ng h p không có đi u khi n ô tôườ ợ ề ể
m t n đ nh chuy n đ ng do sai l ch v nấ ổ ị ể ộ ệ ậ
t c góc xoay thân xe (hình 7a), m c m tố ứ ấ
n đ nh th hi n qua sai l ch góc xoayổ ị ể ệ ệ
thân xe (hình 7b). Khi có đi u khi n v nề ể ậ
t c góc xoay thân xe đ c duy trì g n giáố ượ ầ
tr mong mu n nên tăng m c n đ nhị ố ứ ổ ị
chuy n đ ng c a ô tô. ể ộ ủ
K t thúc chuy n làn góc xoay thânế ể
xe mong mu n là 0ốo do s bi n d ng đànự ế ạ
h i c a l p trong quá trình tr lái nên cóồ ủ ố ả
s sai l ch góc xoay thân xe, do đó quự ệ ỹ
đ o chuy n đ ng c a ô tô (hình 7c) l chạ ể ộ ủ ệ
v i h ng chuy n đ ng th ng. B đi uớ ướ ể ộ ẳ ộ ề
khi n duy trì giá tr v n t c xoay thân xeể ị ậ ố
g n v i giá tr mong mu n nh m duy trìầ ớ ị ố ằ
h ng chuy n đ ng th ng c a ô tô. ướ ể ộ ẳ ủ
K t qu mô ph ng cho th y r ngế ả ỏ ấ ằ
qu đ o chuy n đ ng phù h p v i tínỹ ạ ể ộ ợ ớ
hi u đi u khi n góc quay vành lái, khi cóệ ề ể
đi u khi n qu đ o chuy n đ ng c a ôề ể ỹ ạ ể ộ ủ
tô g n v i qu đ o mong mu n h n khiầ ớ ỹ ạ ố ơ
không có đi u khi n. ề ể
IV.K t lu n:ế ậ
Tác gi đã đ a ra b đi u khi nả ư ộ ề ể
m đ đi u khi n chuy n đ ng n đ nhờ ể ề ể ể ộ ổ ị
c a ô tô d a vào vi c phân ph i l củ ự ệ ố ự
phanh t i m i bánh xe. T k t qu môạ ỗ ừ ế ả
ph ng th y r ng khi có đi u khi n ô tôỏ ấ ằ ề ể
chuy n đ ng n đ nh h n so v i tr ngể ộ ổ ị ơ ớ ườ
h p không có đi u khi n. K t qu c aợ ề ể ế ả ủ
nghiên c u có th làm c s đ ch t oứ ể ơ ở ể ế ạ
b đi u khi n chuy n đ ng đ nh c a ôộ ề ể ể ộ ổ ị ủ
tô.
Tài li u tham kh o:ệ ả
[1] Nguy n Kh c Trai – ễ ắ Tính đi u khi nề ể
và quĩ đ o chuy n đ ng c a ô tôạ ể ộ ủ - Nhà
xu t b n Giao thông v n t i, Hà N i,ấ ả ậ ả ộ
1997.
[2]. B.Bouchon-Meunier-H Thu n-ồ ầ
Đ ng Thanh Hà – ặLogic m và ng d ngờ ứ ụ
– Nhà xu t b n Đ i h c Qu c gia Hà n i,ấ ả ạ ọ ố ộ
2007
[3] Nguy n Thành Công- ễNghiên c u ngứ ứ
d ng logic m trong đi u khi n chuy nụ ờ ề ể ể
đ ng n đ nh c a ô tôộ ổ ị ủ , Lu n văn th c sĩậ ạ
khoa h c, Đ i h c Bách khoa Hà N i,ọ ạ ọ ộ
2009
[4] Jong Hyeon Park and Woo Sung Ahn -
H-infinite Yaw-Moment Control with
Brakes for Improving Driving
Performance and Stability – Proceedings
of the 1999 IEEE/ASME International
Conference on Advanced Advanced
Mechatronics, September 1999, Atlanta,
USA
[5] Rajesh Rajamani – Vehicle Dynamics
and control - Springer Science+Business,
Inc., 233 Spring Street, New York, NY
10013, USA
[6] Sang-Jin Ko, Jeong-Jung Kim and Ju-
Jang Lee - Yaw stabilization of a vehicle
by yaw stability controller based on Fuzzy
Logic – 8th International Symposium on
Advanced Intelligent System (ISIS2007),
September 2007, Sokcho-City, Korea
4















![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)