
PHƯƠNG PHÁP ĐIỀU CHỈNH TẦN SỐ TRONG HỆ THỐNG ĐIỆN
I. Đặt vấn đề
Hệ thống điện bao gồm nhà máy điện, đường dây, trạm biến áp là một thể thống nhất. Chất
lượng điện năng được đánh giá bởi hai thông số kỹ thuật là điện áp và tần số. Trong đó điện áp có
tính chất cục bộ, tần số mang tính hệ thống hay nói cách khác là tần số có giá trị như nhau tại mỗi
nút trong hệ thống điện. Độ lệch tần số ảnh hưởng đến hoạt động của tất cả các thiết bị trong hệ
thống điện.
Nước ta cũng như hầu hết các nước trên thế giới đều sử dụng dòng điện với tần số 50Hz, trừ
Mỹ và một phần nước Nhật là sử dụng dòng điện tần số 60Hz.
1. Lý do điều khiển tần số:
a. Đối với hộ tiêu thụ:
Khi có sự thay đổi về tần số thì có thể gây ra một số hậu quả xấu vì:
- Các thiết bị được thiết kế và tối ưu ở tần số định mức. Biến đổi tần số dẫn đến giảm năng suất
làm việc của các thiết bị.
- Làm giảm hiệu suất của thiết bị ví dụ như động cơ, thiết bị truyền động.
- Ảnh hưởng đến chất lượng của quá trình sản xuất.
b. Đối với hệ thống điện:
- Biến đổi tần số ảnh hưởng đến hoạt động của các thiết bị tự dùng trong các nhà máy điện, có
nghĩa là ảnh hưởng đến chính độ tin cậy cung cấp điện. Tần số suy giảm có thể dẫn đến ngừng
một số bơm tuần hoàn trong nhà máy điện, tần số giảm nhiều có thể dẫn đến ngừng tổ máy.
- Thiết bị được tối ưu hóa ở tần số 50 Hz, đặc biệt là các thiết bị có cuộn dây từ hóa như máy
biến áp
- Làm thay đổi trào lưu công suất trong hệ thống. Tần số giảm thường dẫn đến tăng tiêu thụ
công suất phản kháng, đồng nghĩa với thay đổi trào lưu công suất tác dụng và tăng tổn thất trên
các đường dây truyền tải.
- Tính ổn định của khối tuabin máy phát.
2. Nguyên nhân của sự thay đổi tần số
- Ngày trong tuần
- Giờ trong ngày
- Ảnh hưởng của thời tiết (nhiệt độ, độ ẩm, mây mưa v.v...)
- Chính sách về giá theo giờ trong ngày.
- Những biến cố đặc biệt ví dụ chương trình TV, v.v...
- Những yếu tố ngẫu nhiên…
II. Điều chỉnh tần số sơ cấp (Primary Frequency Control)
1. Nguyên tắc điều khiển:
1.1 Một số khái niệm cơ bản:
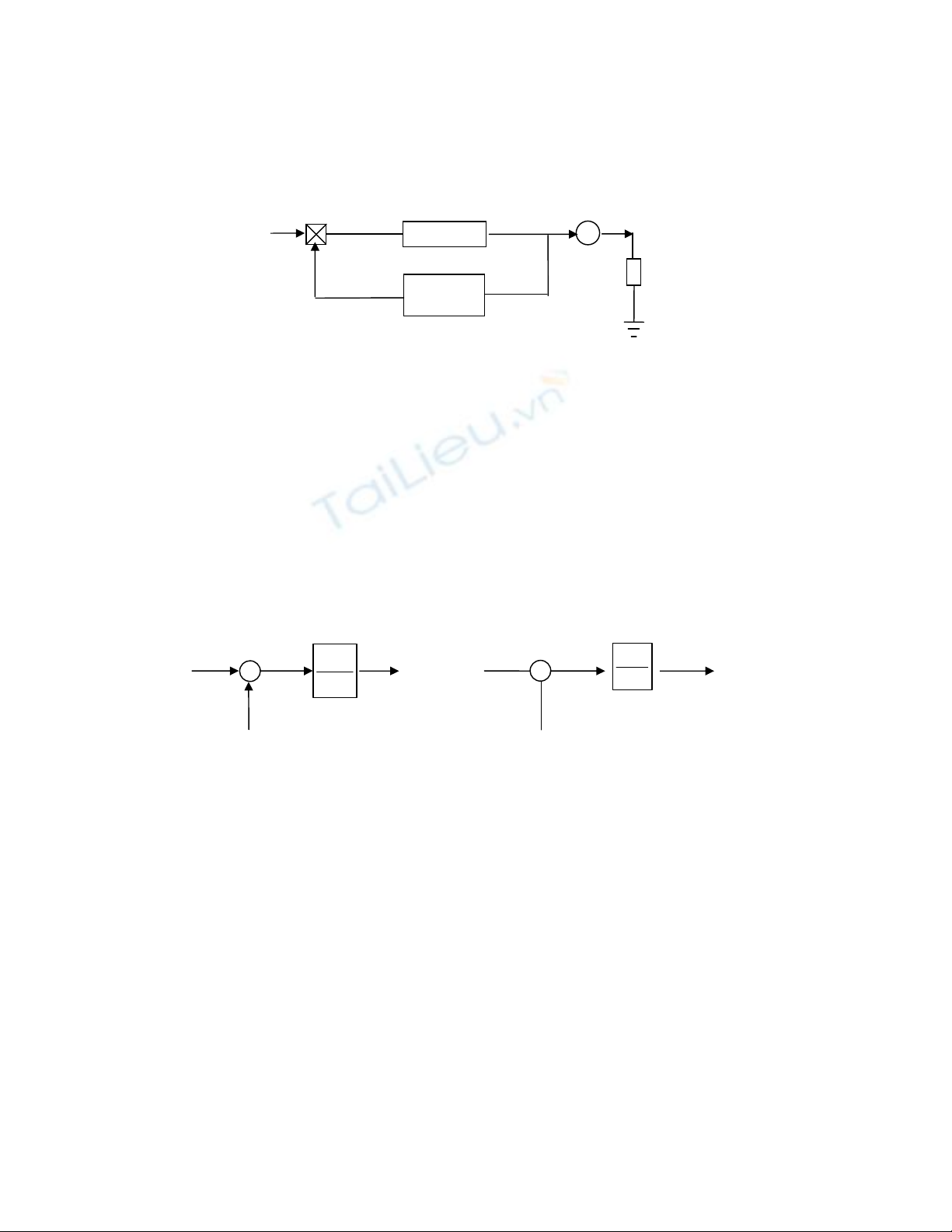
Để tìm hiểu các khái niệm cơ bản ta xét trường hợp đơn giản nhất là một máy phát cấp cho
một phụ tải độc lập theo hình vẽ dưới đây:
Hinh 1. Máy phát cung cấp cho tải cô lập
Trong đó:
Pm: Công suất cơ
Pe: Công suất điện
PL: Công suất tải
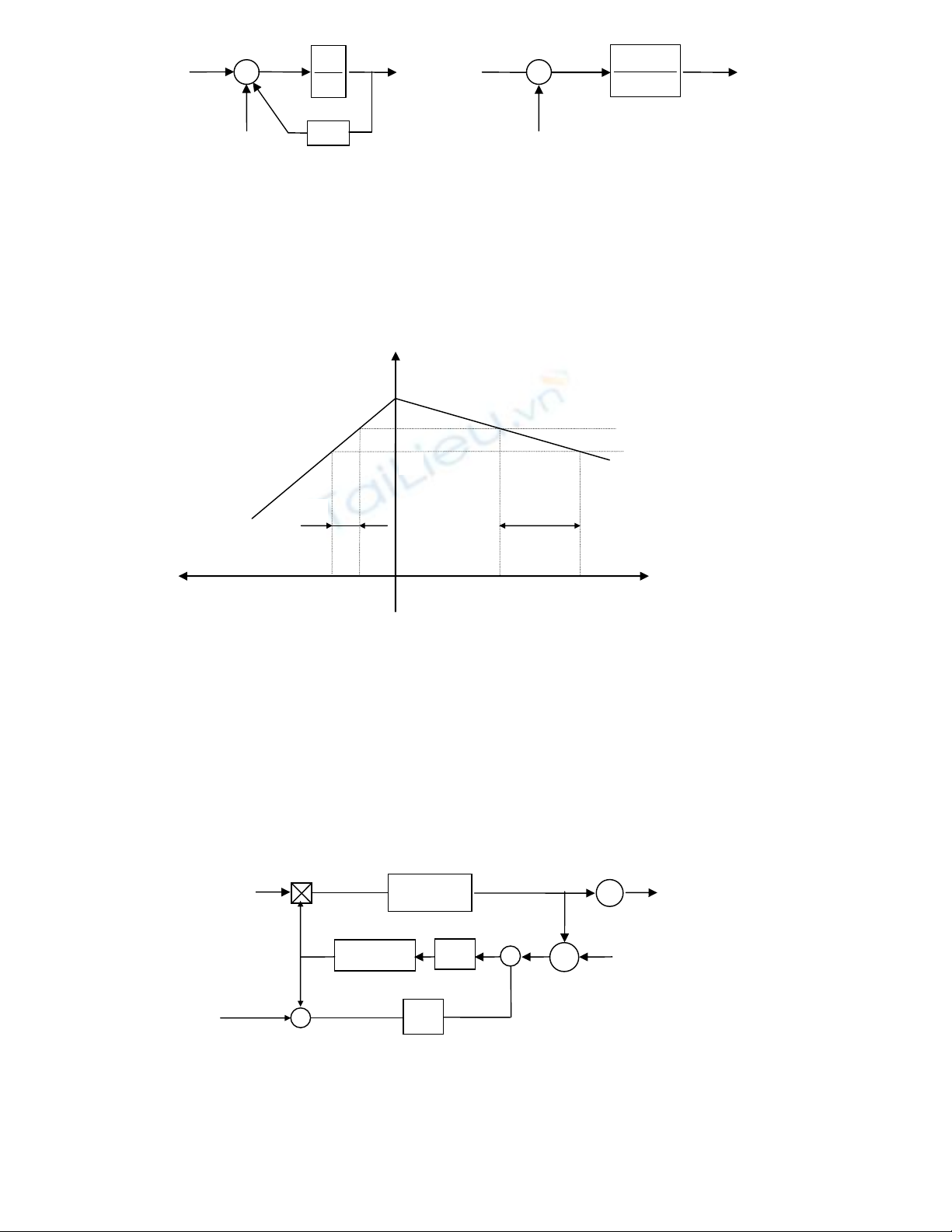
a. Đáp ứng của máy phát khi có sự thay đổi của phụ tải
Khi có sự thay đổi phụ tải, công suất điện máy phát thay đổi gây ra sự chênh lệch giữa
moment điện và moment cơ trên trục máy phát và kết quả là sự sai lệch về tốc độ, độ lệch này
được xác định từ phương trình cân bằng công suất máy phát.
Hinh 2. Sơ đồ khối hàm truyền mô tả mối quan hệ giữa moment, độ lệch công suất và tốc độ
b. Đáp ứng của phụ tải đối với độ lệch tần số:
Phụ tải của hệ thống điện có thể coi là tập hợp các thiết bị điện. Trong đó có những phụ tải
hầu như không thay đổi công suất theo tần số như chiếu sáng, phát nhiệt và có những phụ tải với
công suất mang đặc tính phụ thuộc vào tần số như động cơ, quạt, máy bơm v.v... Khi có thay đổi
phụ tải ta có thể biểu diễn theo biểu thức sau:
rLe
DPP
Trong đó:
L
P
= Thành phần tải thay đổi không phụ thuộc tần số
r
D
= Thành phần thay đổi của tải theo tần số
D = Hằng số đặc tính tải theo tần số
D là hệ số biểu diễn phần trăm tải thay đổi theo phần trăm tần số thay đổi. Thông thường giá
trị của D là từ 12%. Nếu giá trị của D = 2 thì khi tần số thay đổi 1% tải thay đổi 2%.
T
m
Hs2
1
Hs2
1
r
r
T
e
P
e
P
m
+
+
Pe
Hơi hoặc
nước
Valve/cửa
Bộ điều tốc
Governor
Tuabin
G
Tải PL
Hinh 3. Sơ đồ khối hàm truyền mô tả mối quan hệ giữ mô men và độ lệch tần số
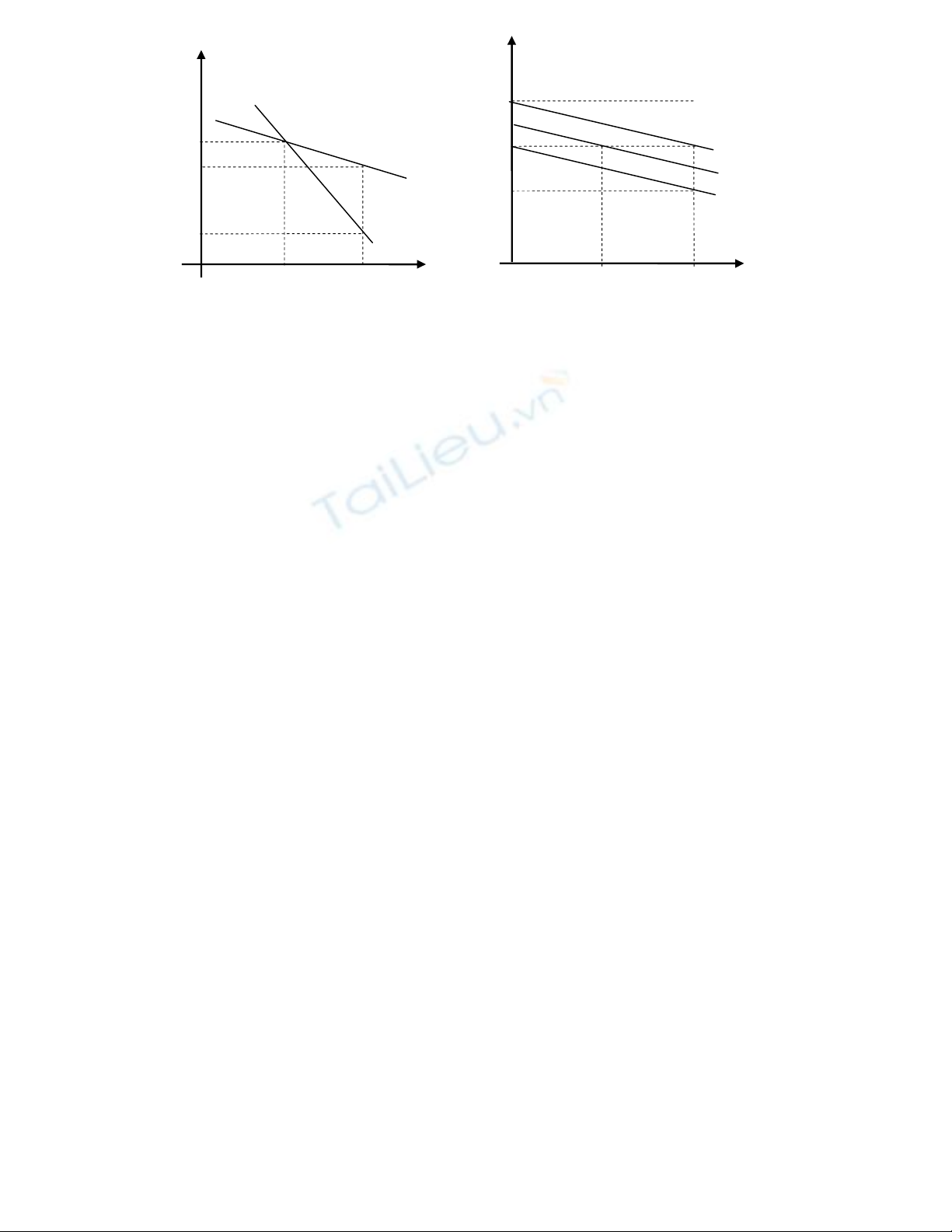
d. Vận hành máy phát song song
Máy phát vận hành song song trong hệ thống điện với cùng 1 giá trị R:
- Cùng tham gia điều chỉnh
- Điều chỉnh theo khả năng của từng tổ máy.
Hinh 4. Đặc tính độ dốc tần số
1.2 Điều chỉnh công suất máy phát:
- Mối quan hệ giữa tốc độ và phụ tải có thể điều chỉnh được nhờ đưa thêm điểm đặt phụ tải.
- Tác động điều chỉnh cho ta một họ các đường đặc tính điều chỉnh song song nhau.
- Việc điều chỉnh tần số được thực hiện bằng cách di chuyển lên hoặc xuống đặc tính điều
chỉnh.
Pe
Y
Hơi hoặc
nước
Valve/cửa
Tốc độ đặt
0
Tích phân
-K
Tuabin
R
G
∆
r
+
Điểm đặt tải
Công suất ra Công suất ra
f
0
f
1
f
P
2
P
1
f (Hz)
Tổ máy 2
Tổ máy 1
Ms
1
DMs
1
r
r
P
L
P
m
+
+
P
m
P
L
D
-
-
-
Hinh 5. Tác động của việc thay đổi đặc tính điều chỉnh
2. Những yêu cầu về điều khiển sơ cấp:
a. Điều khiển sơ cấp là bắt buộc:
Qua các phân tích trên thì xét về góc độ lưới điều khiển sơ cấp là bắt buộc. Và bất cứ giải
pháp điều khiển nào được xem là tốt nhất cũng không thể thực hiện được nếu như ngừng điều
khiển sơ cấp.
b. Điều khiển sơ cấp không thể hủy bỏ bởi giới hạn phụ tải:
Giới hạn tải luôn ngăn cản việc điều chỉnh k*∆f, do đó thao tác điều chỉnh theo k*∆f có thể
bị hủy bỏ bởi giới hạn tải.
c. Điều chỉnh sơ cấp càng nhanh cành tốt :
Xét từ góc độ vận hành lưới điện thì điều chỉnh sơ cấp càng nhanh, càng tốt. Trong trường
hợp xuất hiện mất cân bằng giữa phát điện và tiêu thụ điện, thì thao tác điều chỉnh nhanh sẽ giảm
được độ tụt tần số.
d. Cần phải tránh dải chết và vùng lọc:
Vùng chết và tính lọc phải loại bỏ trong điều chỉnh sơ cấp vì nó là nguồn gốc của tính trễ
trong điều khiển sơ cấp. Phản ứng của các thiết bị này cũng là nguồn gốc của sự mất ổn định của
hệ thống điện.
e. Điều khiển sơ cấp phải thực hiện ở từng tổ máy:
Yêu cầu chung là mỗi tổ máy phải tham gia vào điều khiển sơ cấp với độ trượt nằm trong
khoảng 28%, với dự trữ sơ cấp là 2.5 %. Đặc biệt trong nhà máy điện chu trình hỗn hợp (CC)
điều khiển sơ cấp phải thực hiện trong từng phần chu trình - tuabin và đuôi hơi (fired gasturbine
and unfired steam).
Chính những đặc điểm của điều chỉnh sơ cấp dẫn đến nhu cầu điều chỉnh tần số thứ cấp.
f(Hz
)
f(Hz)
100 %
50 %
100 %
50 %
Thay đổi độ dốc Thay đổi điểm đặt
50
53
50
47
III. Điều chỉnh tần số thứ cấp (Secondary Frequency Control)
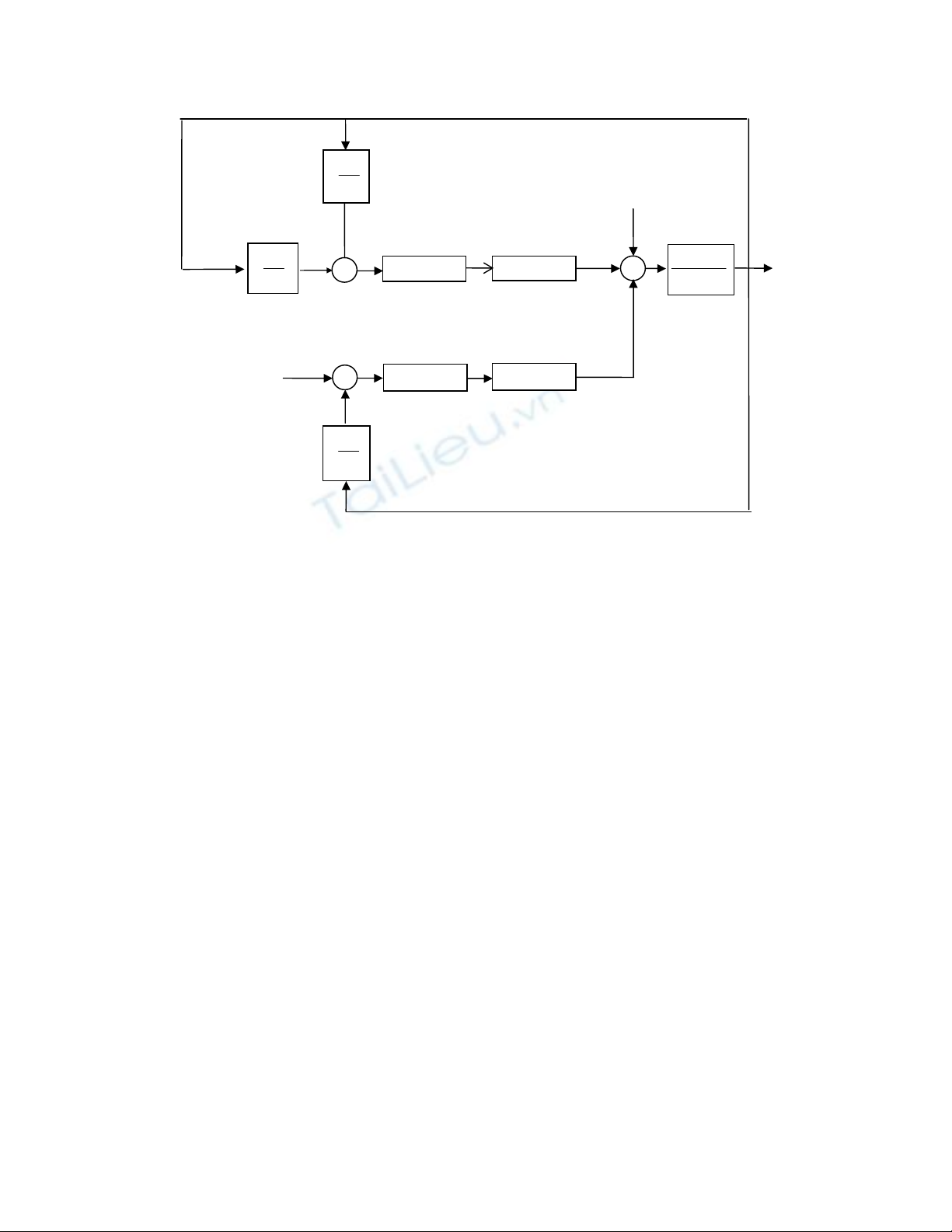
1. Điều khiển tần số thứ cấp trong hệ thống điện cô lập:
Hinh 6. Khâu tích phân thêm vào cho tổ máy tham gia AGC
- Trong HT điện cô lập hay HT điện liên kết không xét đến ràng buộc về trao đổi công suất
giữa các khu vực thì nhiệm vụ chính của AGC là khôi phục tần số về giá trị danh định.
- Đại lượng độ lệch tần số đặc trưng cho sự thay đổi công suất.
- Thực hiện bằng cách thêm một tín hiệu đặt qua khâu tích phân vào bộ điều tốc của turbine
tham gia vào AGC.
- Điều chỉnh tần số thứ cấp phải chậm hơn sơ cấp để đảm bảo điều chỉnh sơ cấp đã được thực
hiện đảm bảo ổn định tần số.
- AGC điều chỉnh công suất ra của máy phát theo đáp ứng tần số của HT điện từ đó khôi phục
lại giá trị đặt của các tổ máy không tham gia vào AGC.
2. Điều khiển tần số thứ cấp trong hệ thống điện liên kết :
a. Khái niệm lỗi điều khiển khu vực (Area Control Error - ACE):
- Sự thay đổi công suất trong HT liên kết gây ra độ lệch tần số và độ lệch trào lưu công suất
trao đổi giữa các khu vực.
- Nhắc lại rằng mục đích chính của điều khiển tần số thứ cấp là khôi phục độ lệch tần số đến
không và độ lệch trào lưu công suất trao đổi đến không.
- Một cách có hiệu quả, người ta muốn rằng nếu như có sự thay đổi tải ở khu vực 1 thì không
có thao tác điều chỉnh thứ cấp ở khu vực 2 mà chỉ có ở khu vực 1.
- Khi có sự thay đổi tải ở khu vực 1 làm xuất hiện độ lệch công suất trên đường dây liên kết.
K
s
1
K
s
1
K
s
1
1
Ms D
Turbine
Governor
Turbine
Governor
+
Điểm đặt tải
-
+
P'm
P
L
P"
m
+
Tổ máy chỉ điều
khiển sơ cấp
Điều khiển thứ
c
ấp cho tổ máy
chọn
-
-
+

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)