
1
9.6 THIẾT KẾ BỘ ĐIỀU ÁP XOAY CHIỀU
9.6.1 Trình tự thiết kế
Khi thiết kế một bộ điều áp xoay chiều nên tiến hành theo trình tự sau:
1. Phân tích chế độ làm việc của tải, tìm hiểu các căn cứ thiết kế.
2. Lựa chọn sơ đồ.
3. Tính toán thông số mạch động lực
4. Thiết kế mạch điều khiển
a-Thiết kế mạch nguyên lý
b-Tính chọn linh kiện
Căn cứ thiết kế
Các yếu tố sau có ảnh hưởng nhiều nhất tới việc thiết kế một bộ điều
áp xoay chiều. Khi thiết kế cần xét:
- Đặc điểm của tải :
+Công suất tải
+Điện áp và dòng điện bằng hay khác điện áp nguồn lưới.
+Chế độ làm việc: dài hạn, ngắn hạn hay ngắn hạn lặp lại
+Dải điều khiển công suất
+Nguồn cấp
- Điều kiện môi trường làm việc
+Nhiệt độ
+Độ ẩm
+Các điều kiện khác
- Khả năng cung cấp linh kiện
- Khả năng về tài chính
- Trình độ và khả năng người thiết kế, vận hành.
Việc thiết kế một bộ điều áp xoay chiều một pha và ba pha có một số
đặc điểm, cách làm hơi khác nhau, vì vậy cần phân biệt rõ hai loại điều áp
này.
2
U
1
Zf
U
2
iZ
a
U
2
b
TBB§
U
2
U
1
C
U
1
i
9.6.2 Thiết kế bộ điều áp một pha.
1. Lựa chọn sơ đồ
a-Chọn sơ đồ mạch động lực
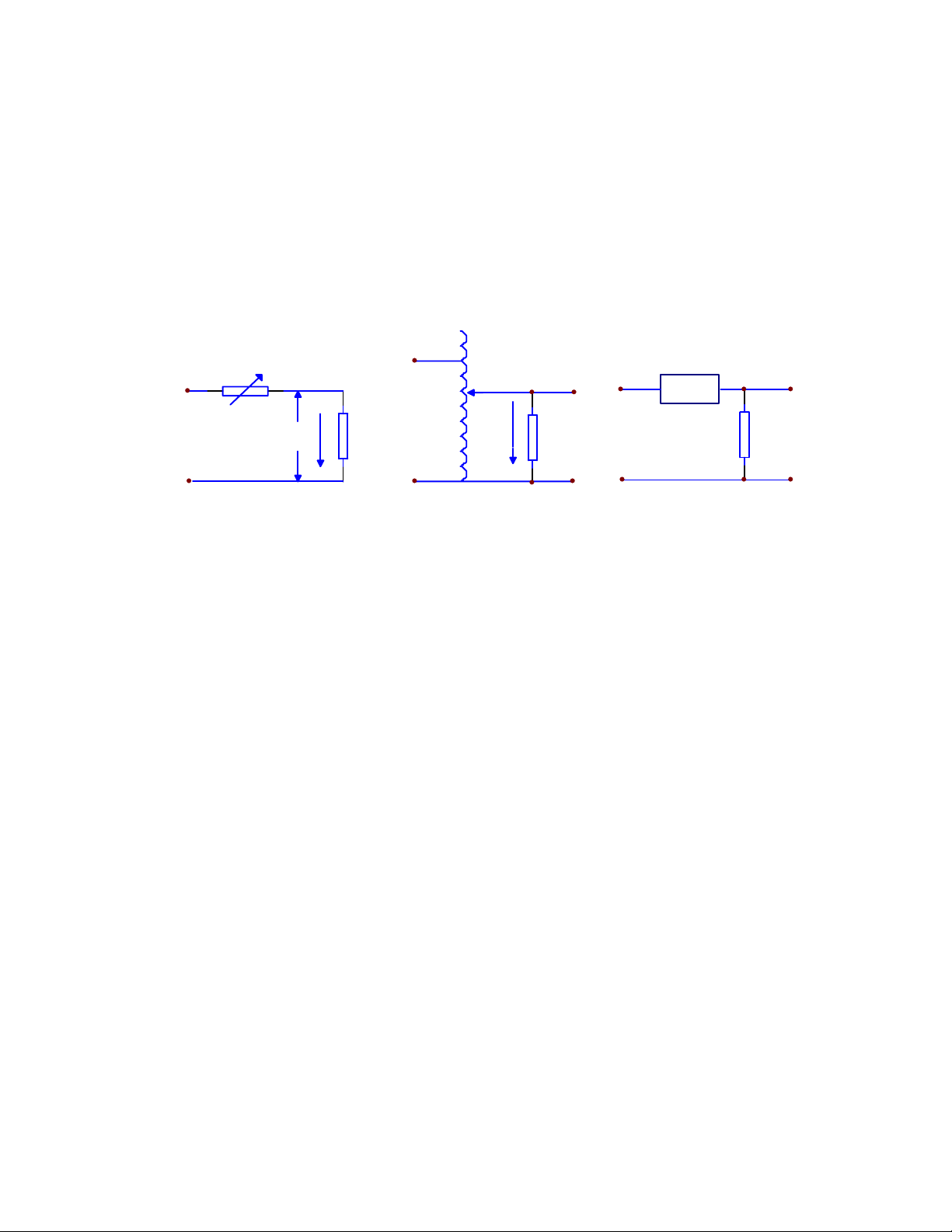
Mạch động lực bộ điều áp xoay chiều nói chung có một số sơ đồ kinh
điển. Trên hình 9. 26 a là điều áp xoay chiều điều khiển bằng cách mắc nối
tiếp với tải một điện kháng hay điện trở phụ (tổng trở phụ ) biến thiên. Sơ đồ
mạch điều chỉnh này đơn giản dễ thực hiện.
Tuy nhiên điều chỉnh kinh điển này hiện nay ít được dùng, do hiệu suất
thấp (nếu Zf là điện trở ) hay cosϕ thấp (nếu Zf là điện cảm ). Người ta có thể
dùng biến áp tự ngẫu để điều chỉnh điện áp xoay chiều U2 như trên hình 9.26
b. Điều chỉnh bằng biến áp tự ngẫu có ưu điểm là có thể điều chỉnh điện áp
U2 từ 0 đến trị số bất kỳ, lớn hay nhỏ hơn điện áp vào. Nếu cần điện áp ra có
điều chỉnh, mà vùng điều chỉnh có thể lớn hơn điện áp vào, thì phương án
phải dùng biến áp là tất yếu. Tuy nhiên sử dụng biến áp tự ngẫu để điều
chỉnh khó thực hiện khi dòng tải lớn, đặc biệt là không điều chỉnh liên tục
được, do chổi than khó chế tạo để có thể chỉ tiếp xúc trên một vòng dây của
biến áp.
Hai giải pháp điều áp xoay chiều trên hình 9.26 a,b có chung ưu điểm
là điện áp hình sin, đơn giản. Có chung nhược điểm là quán tính điều chỉnh
chậm và không điều chỉnh liên tục khi dòng tải lớn. Sử dụng sơ đồ bán dẫn
để điều chỉnh xoay chiều, có thể khắc phục được những nhược điểm vừa
nêu.
Các sơ đồ bán dẫn điều áp xoay chiều trên hình 9.1 được sử dụng. Lựa
chọn sơ đồ nào trong các sơ đồ trên tuỳ thuộc dòng điện, điện áp tải và khả
năng cung cấp các linh kiện bán dẫn. Có một số gợi ý khi lựa chọn các sơ đồ
hình 9.1 như sau:
Hình 9.26 Các phương án điều áp một pha
3
U
UT¶i
t
b
U
UT¶i
t
a
Sơ đồ kinh điển hình 9.1.a thường được sử dụng nhiều hơn, do có thể
điều khiển được với mọi dòng tải. Hiện nay Tiristo được chế tạo có dòng
điện đến 7000A, thì việc điều khiển xoay chiều đến hàng chục nghìn ampe
theo sơ đồ này là hoàn toàn đáp ứng được. Sơ đồ kinh điển đã được dùng
khá lâu rồi (từ những năm 60 của thế k
ỷ trước) nên nó trở nên quá quen
thuộc đối với nhiều tác giả.
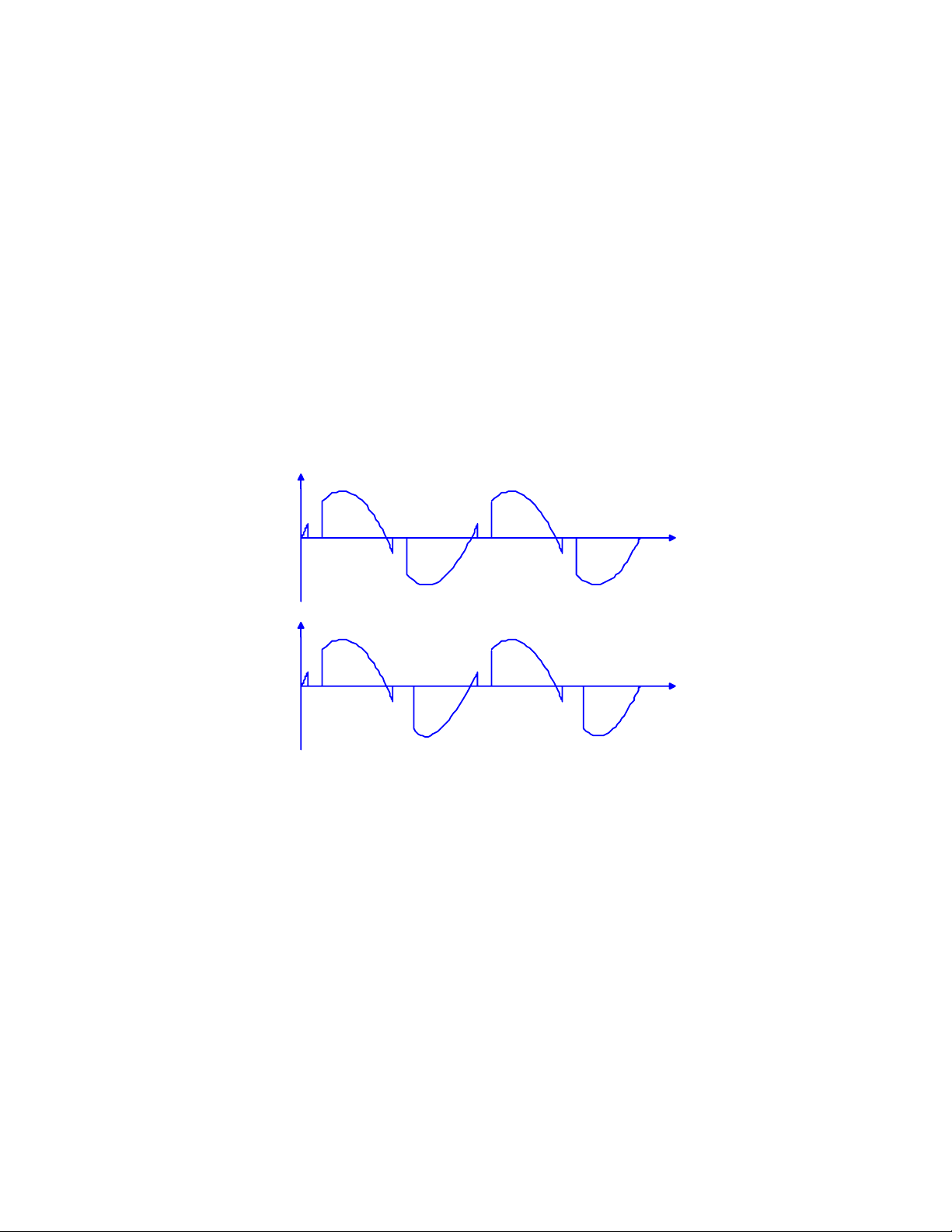
Tuy nhiên việc điều khiển hai Tiristo song song ngược đôi khi có chất
lượng điều khiển không tốt lắm, đặc biệt là khi cần điều khiển đối xứng điện
áp, nhất là khi cung cấp cho tải, mà tải đòi hỏi thành phần điện áp đối xứng,
chẳng hạn như biến áp hay động cơ xoay chiều. Khả năng mất đối xứng điện
áp khi điều khiển là do linh kiện mạch điều khiển Tiristo gây nên sai số.
Điện áp tải thu được gây mất đối xứng như so sánh trên hình 9.27.
Hình 9.27 Hình dạng đường cong điện áp điều khiển
a-Mong muốn b-Không mong muốn
Điện áp và dòng điện không đối xứng như hình 9.27.b cung cấp cho tải,
sẽ làm cho tải có thành phần dòng điện một chiều, các cuộn dây bị bão hoà,
phát nóng và bị cháy. Vì vậy việc định kỳ kiểm tra, hiệu chỉnh lại mạch là
việc nên thường xuyên làm đối với sơ đồ mạch này. Tuy vậy đối với dòng
điện tải lớn thì đây là sơ đồ tối ưu hơn cả cho việc lựa chọn.
Để khắc phục nhược điểm vừa nêu về việc ghép hai Tiristo song song
ngược, Triac ra đời và có thể mắc theo sơ đồ hình 9.1.b. Sơ đồ này có ưu
điểm là, các đường cong điện áp ra gần như mong muốn như hình 9.27.a, nó
còn có ưu điểm hơn về việc lắp ráp. Ở đây chỉ có một van bán dẫn. Sơ đồ
U
U
T¶i
t
b
U
U
T¶i
t
a
α
α1
α2
α
4
U1U2
Z
mạch này hiện nay được sử dụng khá phổ biến trong công nghiệp. Tuy nhiên
Triac hiện nay được chế tạo với dòng điện không lớn (I < 400A), nên với
những dòng điện tải lớn cần phải ghép song song các Triac, lúc đó sẽ phức
tạp hơn về lắp ráp và điều khiển song song. Những tải có dòng điện trên
400A thì sơ đồ hình 9.1 b ít dùng.
Một trong những yếu tố làm cho Triac chưa áp đảo được Tiristo trong
điều áp xoay chiều hiện nay (của năm 2003 này) là về chất lượng. Hiện nay
chất lượng Triac chưa thật cao lắm, do đó việc sử dụng còn làm cho người ta
lo ngại, trong tương lai gần chắc chắn việc sử dụng Triac sẽ rộng rãi hơn.
Sơ đồ hình 9.1.c có hai Tiristo và hai điốt có thể được dùng chỉ để nối
các cực điều khiển đơn giản, trong trường hợp này có thể được dùng khi
điện áp nguồn cấp lớn, cần phân bổ điện áp trên các van, đơn thuần như việc
mắc nối tiếp các van.
Sơ đồ hình 9.1.d trước đây thường được dùng, khi cần điều khiển đối
xứng điện áp trên tải, vì ở đây chỉ có một Tiristo một mạch điều khiển nên
việc điều khiển đối xứng điện áp dễ dàng hơn. Số lượng Tiristo ít hơn có thể
sẽ có ưu điểm hơn khi van điều khiển còn hiếm. Tuy nhiên việc điều khiển
theo sơ đồ này dẫn đến tổn hao trên các van bán dẫn lớn, làm hiệu suất của
hệ thống điều khiển thấp. Ngoài ra việc tổn hao năng lượng nhiệt lớn làm
cho hệ thống làm mát khó khăn hơn.
Đa số các trường hợp điều áp xoay chiều, điện áp tải điều khiển trong
vùng thấp hơn điện áp nguồn, các van bán dẫn được nối trực tiếp tới nguồn.
Trong trường hợp này điện áp tải thường được điều khiển trong dải từ 0 đến
điện áp nguồn cấp.
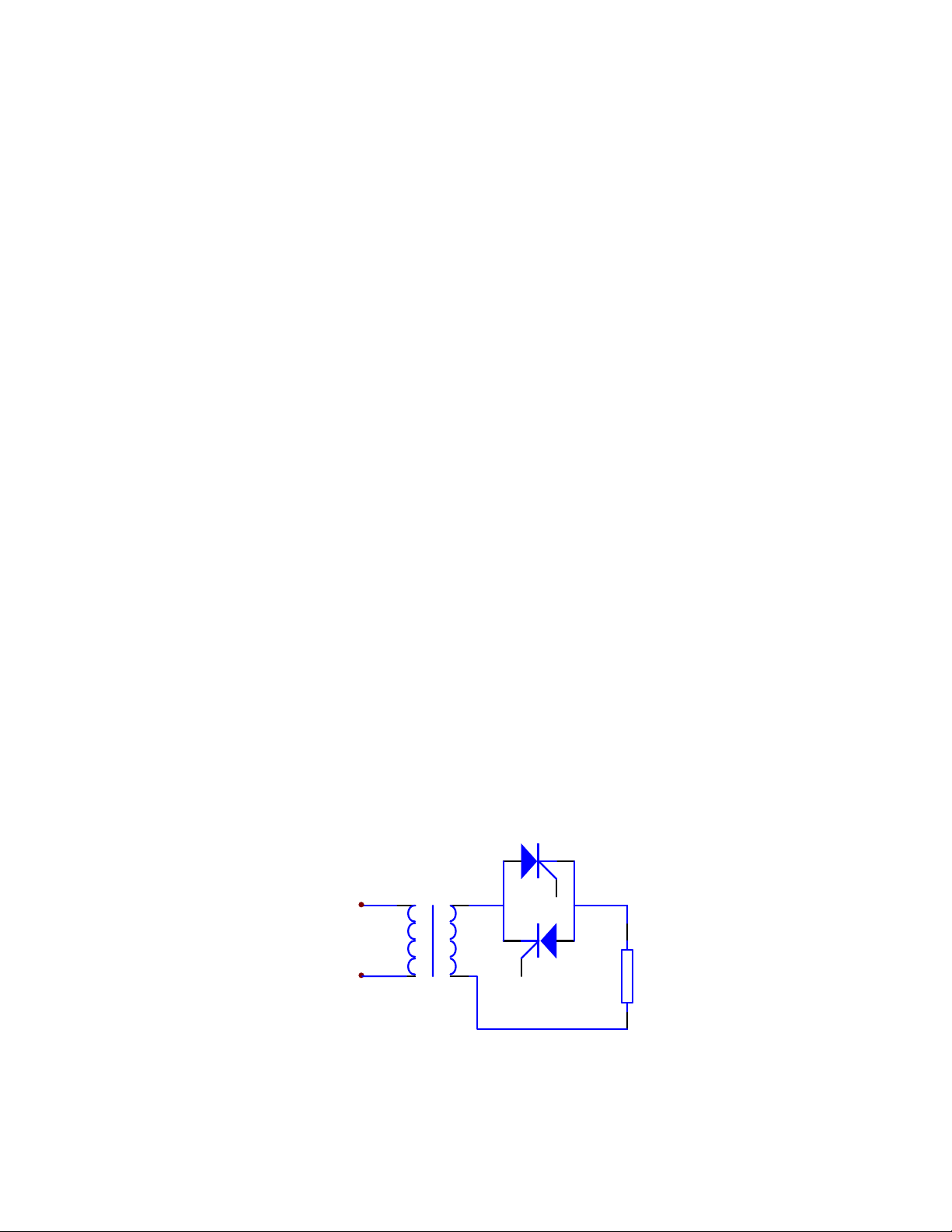
Một số loại tải có điện áp tối đa khác với thông số điện áp nguồn cấp.
Trong trường hợp đó biến áp để phối hợp thông số điện áp nguồn cấp với
thông số điện áp tối đa của tải theo sơ đồ 9.28 cần được đưa vào.
Hình 9.28 Điêù áp xoay chiều với điện áp
tải lớn hơn điện áp nguồn cấp
5
~
T
Dir
Uri
t
Biến áp được sử dụng trên hình 9.28 có thể là biến áp tự ngẫu hoặc biến
áp cách ly. Biến áp cách ly thường nên chọn hơn, bởi vì biến áp cách ly còn
có thêm chức năng bảo vệ xung điện áp từ lưới.
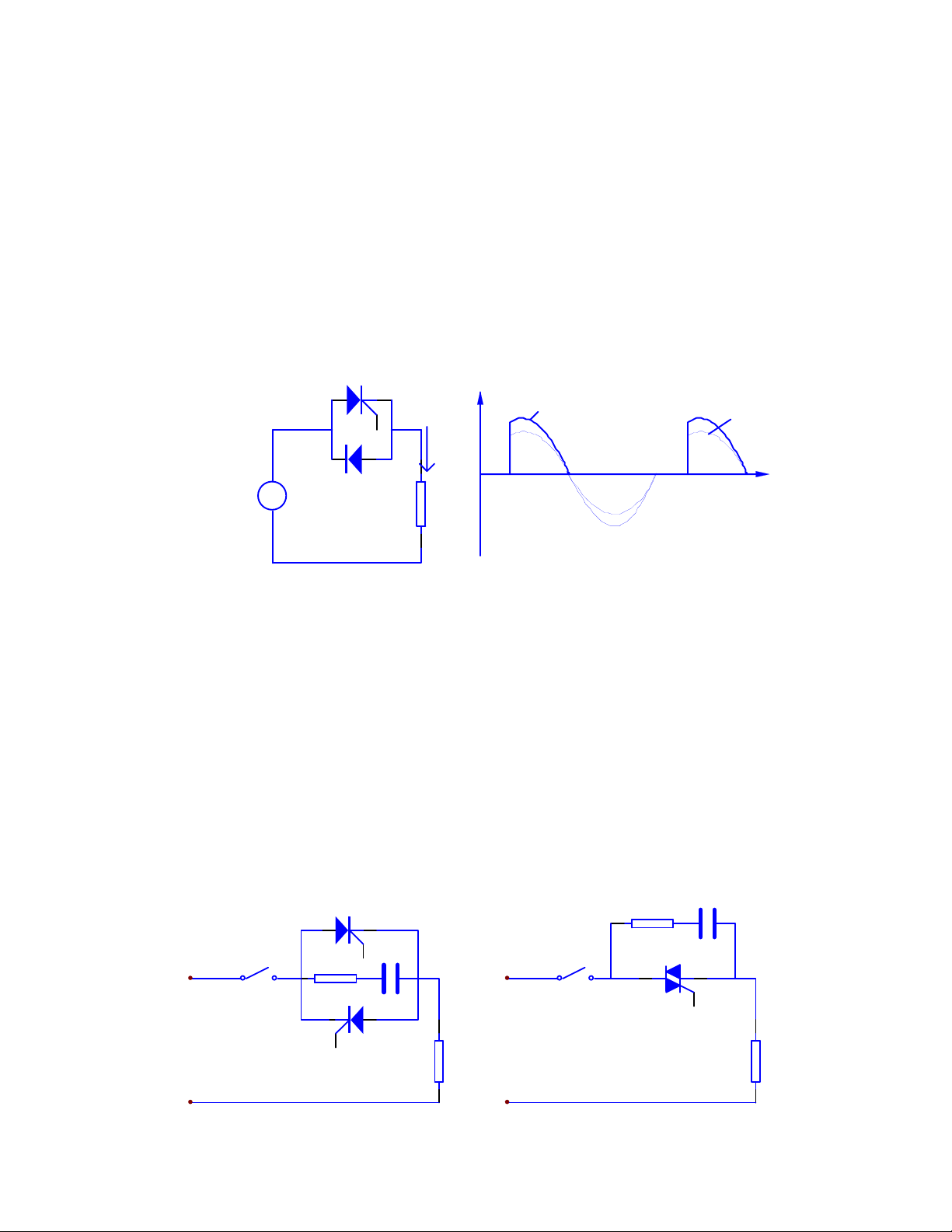
Khi tải không có nhu cầu cao về điều khiển đối xứng, nhất là khi điều
khiển các điện trở lò sấy hay đèn sợi đốt, người ta có thể sử dụng sơ đồ điều
khiển không đối xứng một điốt một Tiristo như hình 9.29
ở đây chúng ta chỉ điều khiển một nửa chu kỳ điện áp còn nửa chu kỳ
không điều khiển. Trường hợp này có thể điều khiển từ 1/4 công suất trở lên.
Tuy nhiên nếu công suất tải lớn sẽ gây mất đối xứng nguồn cấp làm xấu đi
chất lượng nguồn.
2. Tính chọn thông số mạch động lực và bảo vệ.
Mạch động lực và bảo vệ của sơ đồ điều áp xoay chiều hiện nay thường
gặp là hai sơ đồ trên hình 9.30.
Hình 9.29 Điều áp xoay chiều không đối xứng
a) sơ đồ ; b) đường cong điện áp và dòng điện.
a. b.
AT
U1
T
1
RC
T2ZT
AT
U1
RC
T
Z
T

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)