II. THIẾT BỊ KIỂM TRA VÀ CHẨN ĐOÁN GÓC ĐẶT BÁNH XE
(WHEEL ALIGNMENT)
Khi lái xe nếu tài xế liên tục điều khiển vô lăng để điều khiển thì điều này sẽ làm
giảm khả năng xử lý của tài xế. Để giải quyết vấn đề này ta có khái niệm góc đặt bánh xe:
Góc đặt bánh gồm 5 yếu tố sau đây :
+ Góc doãng của bánh xe trước (camber).
+ Góc nghiêng dọc của trục xoay (caster) .
+ Góc nghiêng trục lái trong mặt phẳng ngang (kingpin) .
+ Độ chụm bánh xe (toe in, toe out) .
+ Bán kính quay vòng bánh xe (returning wheel) .
GIỚI THIỆU CAM, CAS, KING, TOE,…:
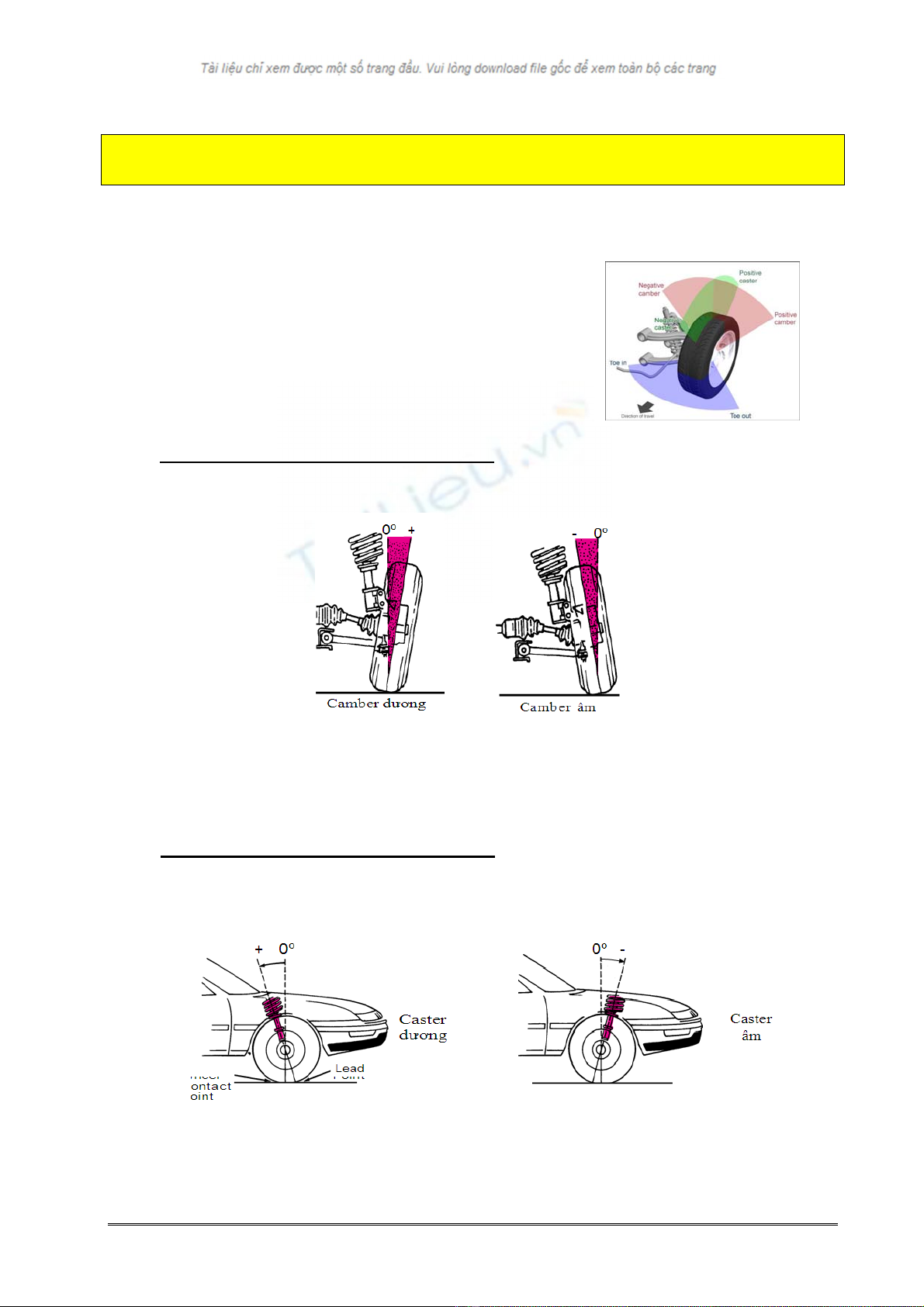
1. Góc doãng của bánh xe trước (camber):
Góc này được đo bằng độ nghiêng so với mặt phẳng thẳng đứng, nhìn từ phía trước.
Tác dụng của camber dương:
- Giảm tải theo phương thẳng đứng.
- Ngăn cản sự tụt bánh xe.
- Ngăn cản camber âm ngoài ý muốn do khi chất tải đầy trên xe.
Góc nghiêng dọc của trục xoay (caster):
2.
Caster là góc hợp bởi đường tâm “trục xoay đứng“ của bánh xe và trục thẳng đứng khi
nhìn từ bên hông.
Vai trò của caster:
- Tính ổn định chạy thẳng.
- Hồi vị bánh xe do khoảng caster.
- 102 -
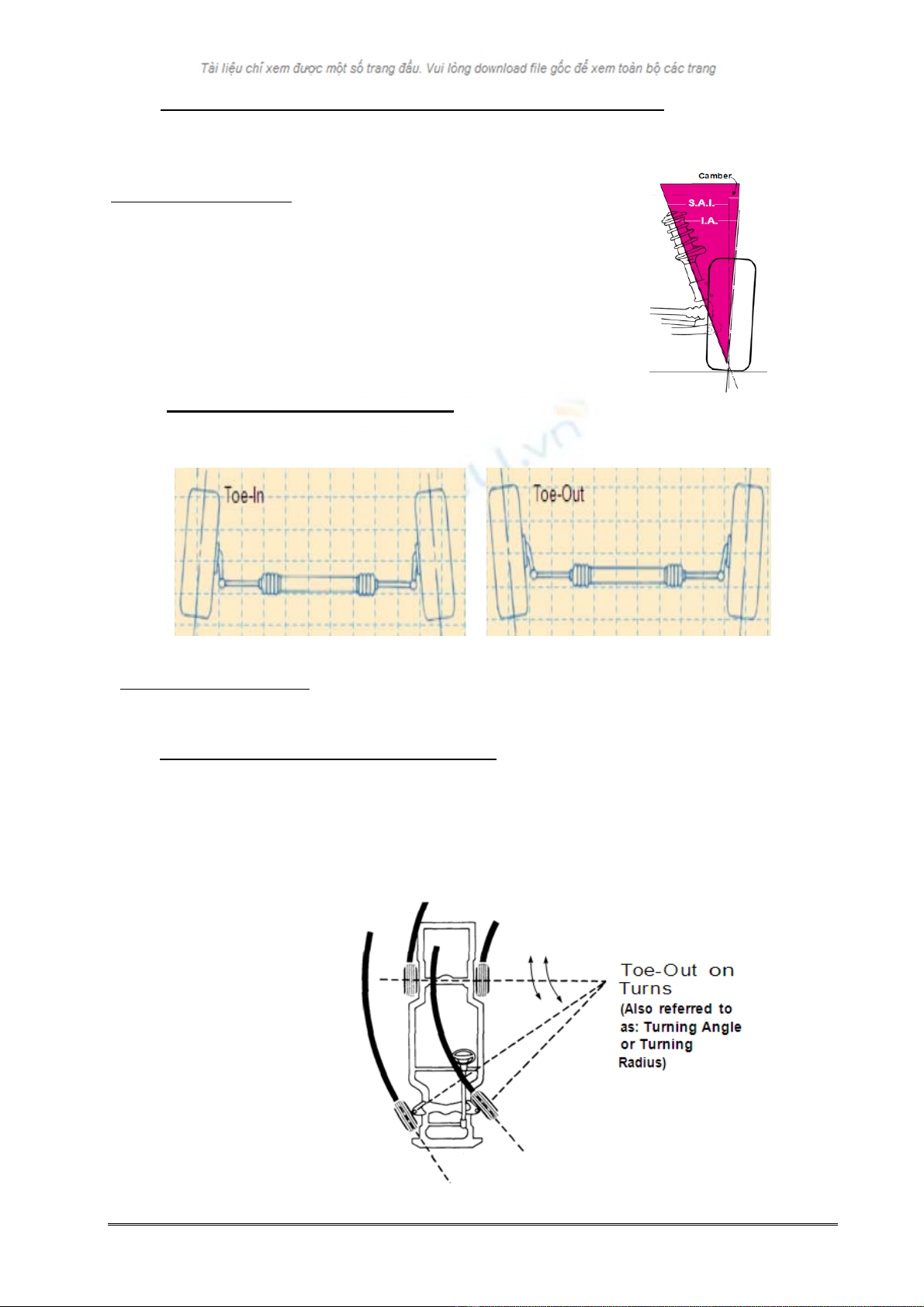
3. Góc nghiêng của trục lái trong mặt phẳng ngang (kingpin):
Góc kingpin là góc hợp bởi đường tâm“trục xoay đứng“ của bánh xe và trục thẳng
đứng khi nhìn từ phía trước xe.
Tác dụng của kingpin:
- Giảm lực đánh lái.
- Cải thiện tính ổn định chạy thẳng (như trong phần caster).
- Giảm sự đẩy ngược và kéo lệch sang một phía.
Độ chụm bánh xe (toe in, toe out):
4.
Khi phía trước bánh xe gần nhau hơn phía sau gọi là độ chụm (khi nhìn từ trên xuống),
ngược lại là độ hở .
Tác dụng của độ chụm:
Là để khử lực camber sinh ra khi camber dương. Độ chụm đầu của hai bánh trước còn
có tác dụng bù trừ vào độ võng của hệ thống treo khi xe phóng tới.
5. Bán kính quay vòng (returning radius):
Ta biết rằng bánh xe dẫn hướng bên trái và bên phải cùng quay một lượng như nhau,
tức là góc quay bằng nhau, chúng sẽ vẽ cùng bán kính quay vòng (r1 = r2), nhưng bánh xe
lại quay quanh một tâm khác nhau (O1, O2). Vì vậy không thể quay êm do sự trượt bên
của lốp. Như vậy các thanh dẫn động phải được biến đổi sao cho đạt được góc lái chính
xác của bánh bên phải và bên trái sao cho r1 > r2 để đạt được góc quay vòng mong muốn
.
- 103 -

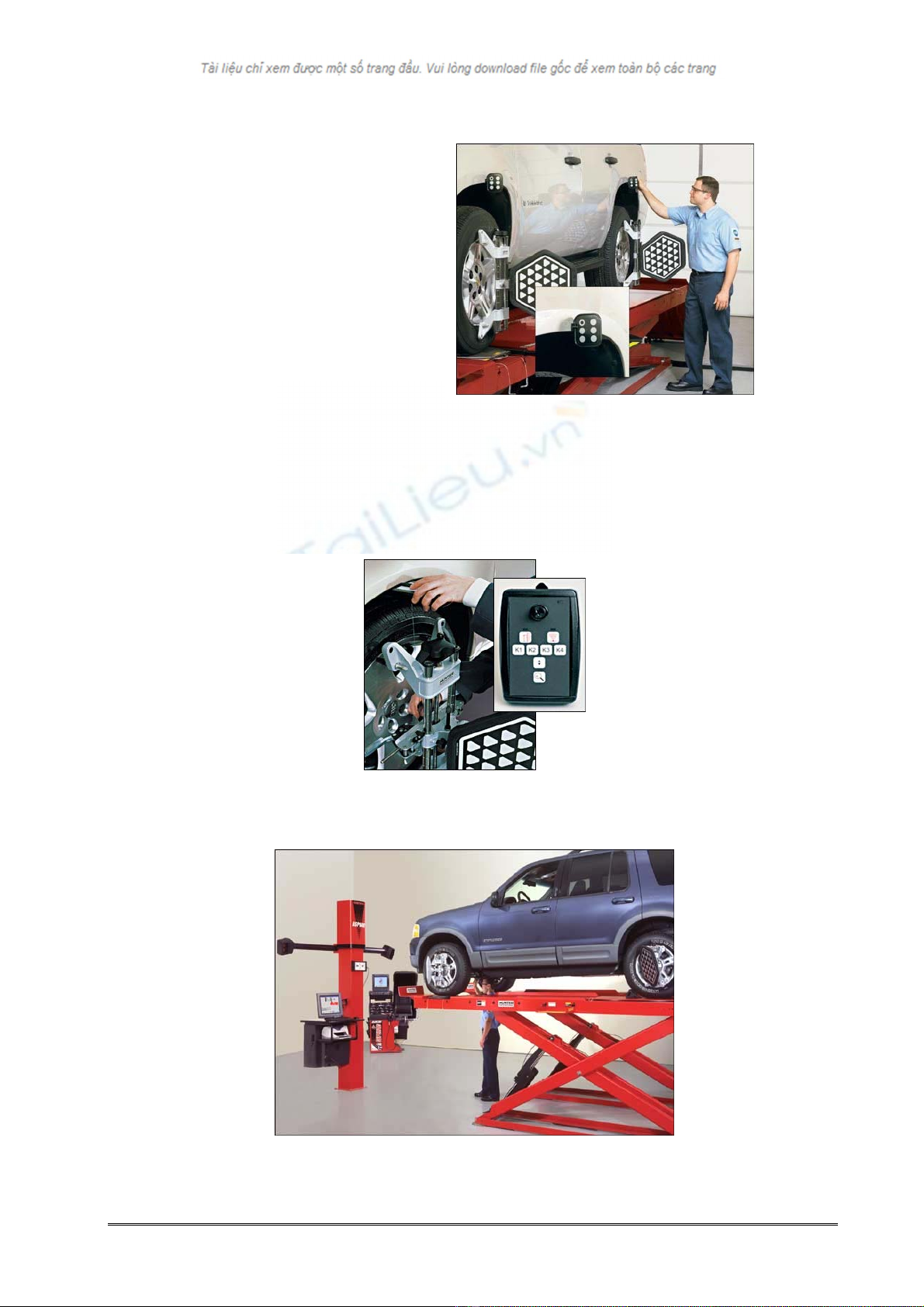
II.1. MÁY CHẨN ĐOÁN GÓC ĐẶT BÁNH XE
(HUNTER WHEEL ALIGNMENT SYSTEM)
Nguyên lý hoạt động của thiết bị:
HUNTER WHEEL ALIGNMENT SYSTEM sử dụng các camera tập trung theo
dõi các mục tiêu (4 tấm Target được lắp ở 4 bánh xe) để nhận biết chính xác vị trí cũng
như hướng quay của các bánh xe, các tín hiệu thu được sẽ được đưa tới một CPU để xử
lý và được xuất ra màn hình, mô phỏng trong không gian 3D các thông số camber, caster,
độ chụm (toe), khoảng sáng gầm xe, và một số thông số khác. Một phần mềm đi kèm
thiết bị có khả năng hướng dẫn người dùng các bước thực hiện để cân chỉnh cho chính
xác các thông số của hệ thống.
Khả năng chẩn đoán của thiết bị:
Ngoài khả năng chẩn đoán các thông số như: camber, caster, độ chụm, khoảng sáng gầm
xe…, thiết bị còn có khả năng chẩn đoán các thông số khác như: áp suất lốp, kích thước
thực của lốp, nhiệt độ lốp, setback, offset, độ mở khi quay vòng, …
CẤU TẠO VÀ CHỨC NĂNG CÁC BỘ PHẬN CHÍNH CỦA HỆ THỐNG:
Màn hình hiển thị LCD: thường là loại 19
1.
inch, hay có thể lớn hơn kết nối với CPU,
bàn phím, chuột…
2. Bộ xử lý trung tâm CPU: dùng để xử lý thông
tin nhận được từ các cảm biến,được cài đặt
hệ điều hành như một máy thông thường,
Nhưng có thêm phần mềm WinAlign’
Software đây là phần mềm hổ trợ xử lý
- 104 -

thông tin từ các cảm biến và hiển thị lên màn
hình.
Máy in: dùng để in một số hình ảnh hiển
3.
thị mô phỏng ra giấy A4.
4. Ngăn chứa các dụng cụ khác.
1. Độ bền
- Chống mòn
- Chống sự va đập vào vỏ bọc.
- Kết hợp bảo vệ hãm xung
- Không kính
2. Dễ sử dụng
- Không có điện ở các bánh xe.
- Trọng lượng nhẹ.
- Không buộc bằng dây cáp.
- Nửa phần trung tâm của bánh xe được cải biên, nó được kéo dài ra 1 hàng cho
thích hợp để xe khách và xe tải có thể sử dụng được.
- 105 -
- Chiều cao của bánh xe có thể bị thay đổi theo thời gian do tuổi đời của chính xe
đó. Những thay đổi đó trong chiều cao của bánh xe có thể ảnh hưởng tới độ
chính xác, sự thẳng hàng…
- Tự động truyền tín hiệu đo lường đến bảng điện tử.
- Chức năng điều khiển từ xa cho phép người thợ điều chỉnh các thao tác mà
không cần sử dụng bảng điện tử.
Mô hình DSP600 thích hợp cho hầu hết các cửa hiệu
- 106 -