92
Phụ lục B:
THIẾT KẾ MẠCH
B.1. Driver điều khiển động cơ DC
L298N (hình 1) là một driver chip tích
hợp sẵn hai mạch cầu H bên trong với chuẩn
điều khiển TTL, không có diode nội bảo vệ
Mosfet. Chịu tải tối đa trên mỗi cầu là 2A, điện
áp 40VDC. Logic ‘0’ ở ngõ vào lên tới 1.5V (
khả năng khử nhiễu cao)
Sử dụng dạng đóng gói Multiwatt15. Các
thông số cần thiết khác của L298N có thể
được tìm thấy tại trang web của hãng
STMicroelectronics [STElectro]
Hình B.1: L298N
B.1.1. Những yêu cầu đặt ra
Trong thực tế ứng dụng này, động cơ DC chỉ có dòng tải 200mA khi hoạt động
bình thường, và lên đến tối đa 2A khi qúa tải. Tuy nhiên, cũng cần thiết kế một bộ
điều khiển mở có thể sử dụng cho các động cơ lên đến 4A.
Việc hạn dòng cho động cơ là rất cần thiết, nhất là khi robot hoạt động, có rất
nhiều tình huống không mong đợi sẽ xảy ra, vì vậy, cần phải có chế độ hạn dòng
bằng phần mềm.
Trong các trường hợp nguy hiểm như ngắn mạch do va chạm, hoặc tuột dây
nối, cần có mạch bảo vệ chống ngắn mạch bằng phần cứng để đáp ứng kịp thời.
Cần điều khiển PWM ở tần số cao để tránh tiếng ồn do động cơ gây ra, nhất là
những tiếng kêu nghe rất rõ ở khoảng tần số 1KHz đến 3KHz. Bộ điều khiển PWM
thông thường được dùng ở 5KHz. Tuy nhiên, trong ứng dụng này, chúng tôi dùng ở
mức 7.8KHz.
93
B.1.2. Giải pháp
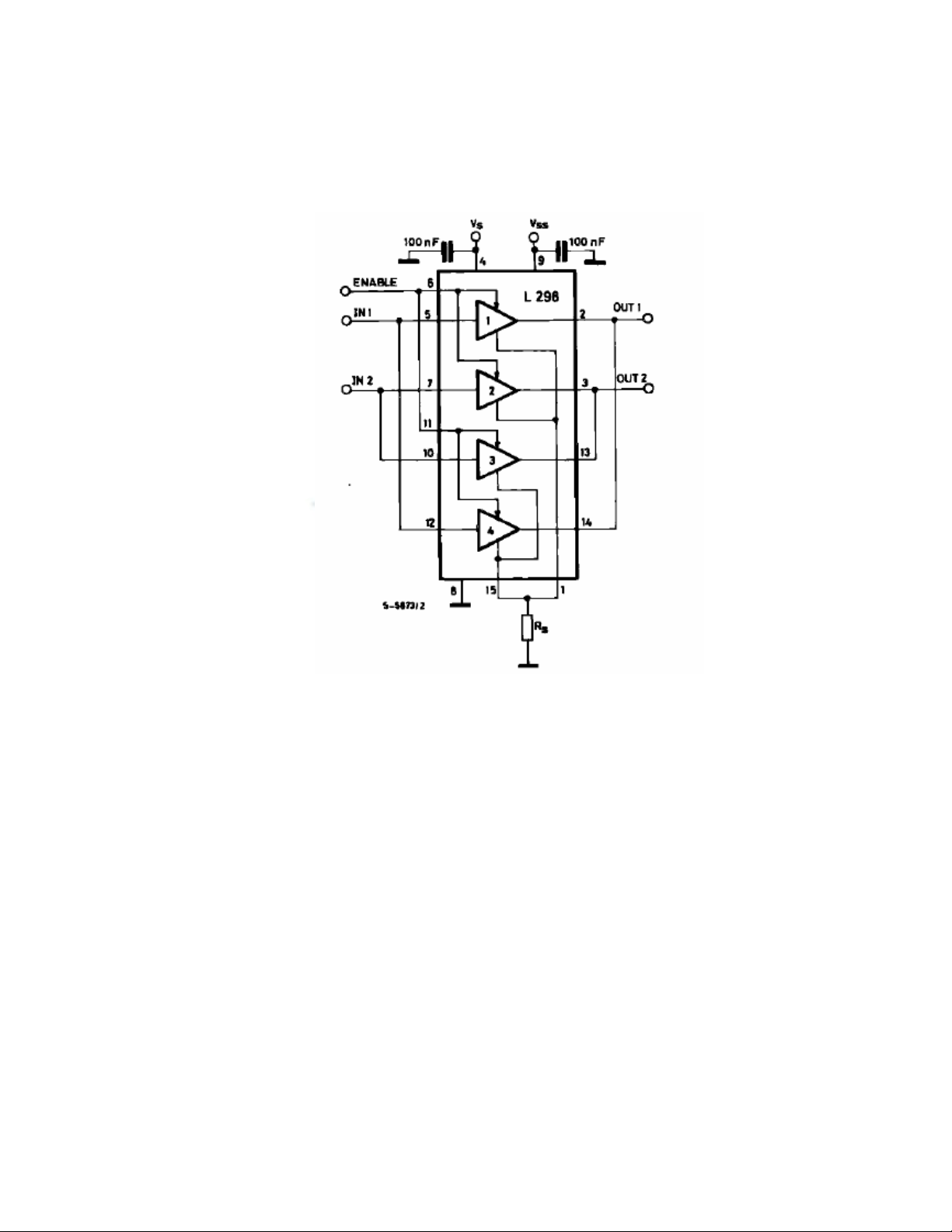
Nối song song hai cầu H như hình B.2 để điều khiển động cơ lên đến 4A.
Hình B.2: Nối song song hai mạch cầu H của L298N
Để ngăn chặn dòng điện qua động cơ nhỏ hơn 4A, tại hai ngõ “sense” chúng ta
sử dụng điện trở công suất 1.2 Ohm để lấy điện áp hồi tiếp về vi điều khiển. Trong
chương trình điều khiển, điện áp hồi tiếp này được đo và luôn đảm bảo ở mức nhỏ
hơn 1.2 x 4 = 4.8 V. Với mức điện áp này vẫn đảm bảo sử dụng điện áp tham chiếu
(Vref) là điện áp nguồn nuôi vi điều khiển (Vdd – 5V) nên không cần dùng điện áp
tham chiếu ngoài. Nếu chọn điện trở nhỏ hơn, điện áp chặn sẽ giảm xuống dưới
4.8V. Ví dụ chọn điện trở 0.6 Ohm, thì điện áp chặn sẽ là 2.4 V. Như vậy lưới chia
quá thấp, và độ nhạy lúc này giảm đi hai lần.
Hiện tượng ngắn mạch có thể xảy ra trong quá trình điều khiển động cơ. Hiện
tượng này không làm ảnh hưởng nhiều đến động cơ, nhưng gây qúa tải tức thời và
khi chương trình chưa kịp kiểm soát điện áp hồi tiếp ở chân “sense” sẽ gây cháy
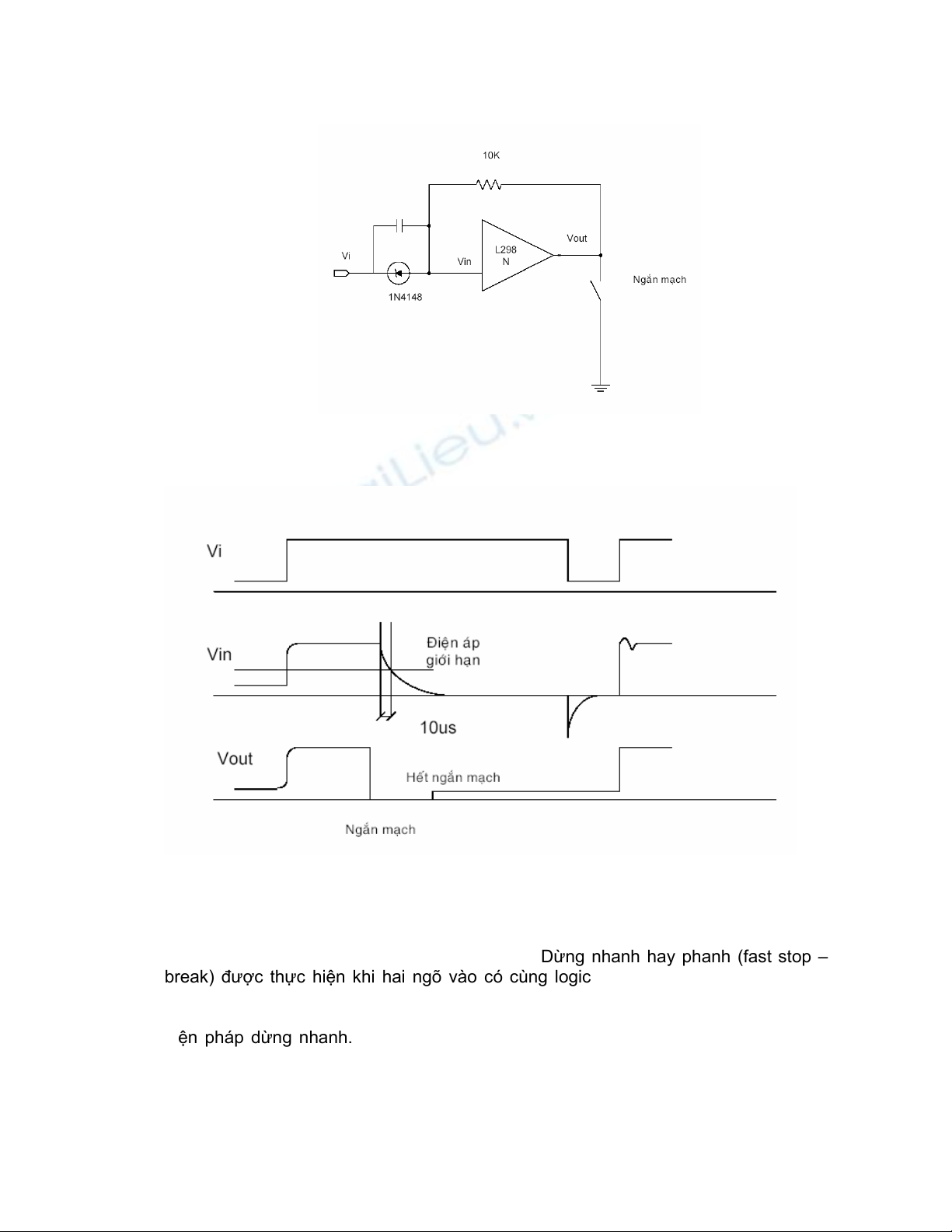
chip. Để hạn chế hiện tượng này, chúng tôi dùng một mạch bảo vệ “thông minh”
(hình B.3). Khi hiện tượng ngắn mạch xảy ra, ngõ vào lập tức bị kéo xuống mức 0 V,
có nghĩa là ngõ ra cũng ở mức thấp và phanh động cơ tức thời trong vòng 10 micro
giây. Hình B.4 mô tả các mức điện áp tức thời khi có ngắn mạch.
94
Hình B.3: Mạch bảo vệ
Hình B.4: Đáp ứng điện áp theo thời gian khi có ngắn mạch
Hai chế độ dừng của L298N rất thuận lợi. Dừng tự do (free stop) được thực
hiện khi chân “enable” được kéo xuống mass. Dừng nhanh hay phanh (fast stop –
break) được thực hiện khi hai ngõ vào có cùng logic. Trường hợp dừng tự do chỉ
được dùng khi điện áp hồi tiếp đo dòng tải ở chân “sense” vượt quá cho phép và
được dừng bởi chương trình điều khiển. Tất cả các trường hợp dừng khác đều dùng
biện pháp dừng nhanh. Như vậy, trong trường hợp ngắn mạch, động cơ sẽ được
duy trì ở trạng thái phanh.
L298N không có diode nội để bảo vệ các mosfet nằm bên trong, do đó, cần có
các diode ngoài để bảo vệ (xem Mạch nguyên lý). Để đảm bảo điều khiển ở tần số
95
PWM cao, cần dùng diode nhanh có điện trở thấp. Diode chuyên dụng để điều khiển
động cơ là các diode fast recovery Schottky. Nhưng ở tần số thấp như trong ứng
dụng này, vẫn có thể dùng loại 1N4007.
Một lưu ý rằng L298N khi hoạt động rất nóng, nhiệt độ có thể làm phỏng tay khi
chạm vào L298N. Do vậy, cần có một miếng tản nhiệt để giải nhiệt cho L298N. Khi
không có tản nhiệt, L298N sẽ nóng rất nhanh và tự động ngắt điều khiển. Trong các
thí nghiệm, L298N sẽ ngắt mạch trong vòng 45 đến 60 giây khi không có tản nhiệt.
Khi có tản nhiệt, chúng tôi đã thử cho chạy liên tục với chu kỳ nhiệm vụ PWM là
100% trong vòng 15 phút, và nhiệt độ của L298N không hề tăng cao.
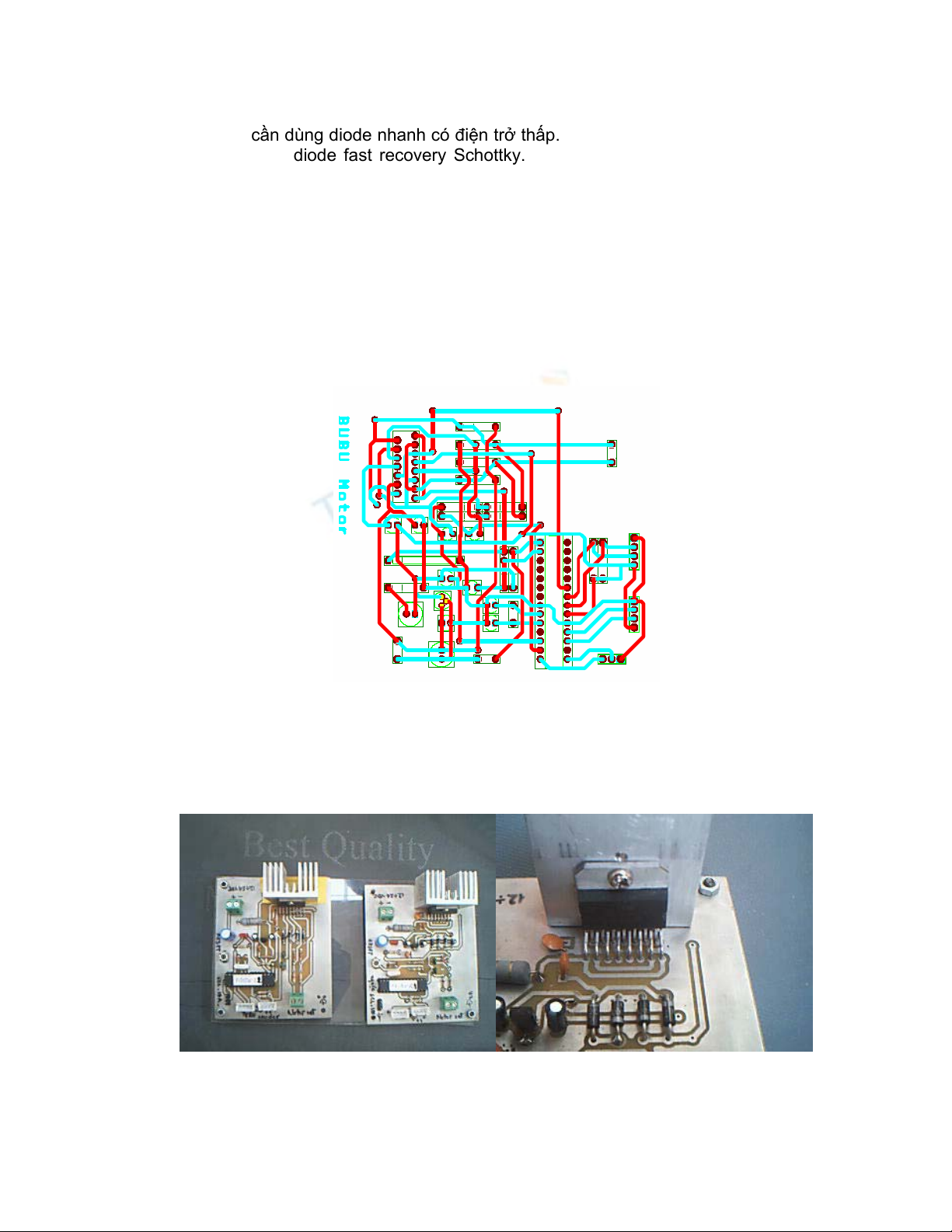
B.1.3. Mạch in
Hình B.5: Mạch in điều khiển động cơ
B.1.4. Mạch thiết kế
Hình B.6: Ảnh chụp mạch điều khiển động cơ
96
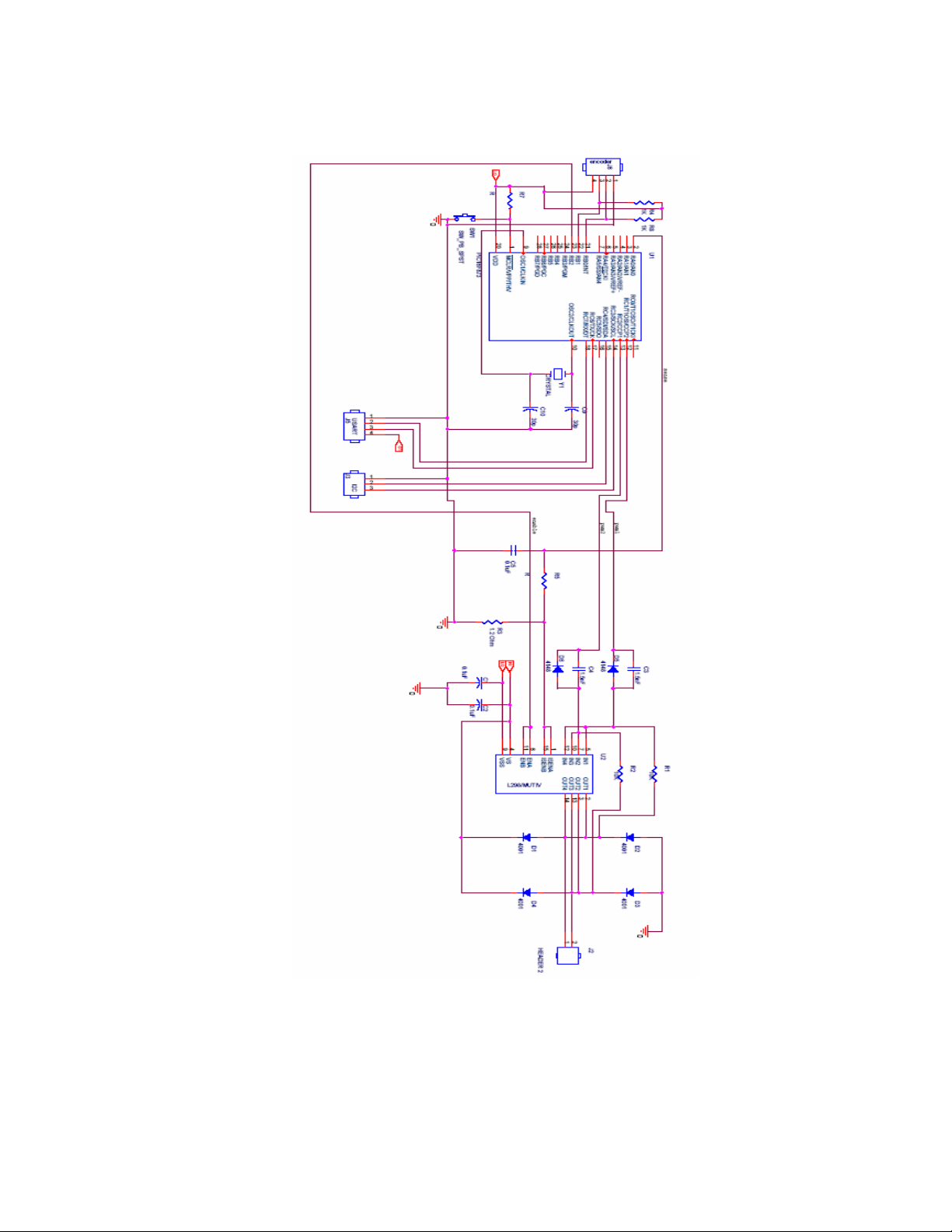
B.1.5. Mạch nguyên lý
Hình B.7: Mạch nguyên lý điều khiển động cơ











![Ngân hàng đề thi trắc nghiệm Kiến trúc máy tính [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160279.jpg)












