2012
Trang1
BỘ CÔNG THƯƠNG
TRƯỜNG: ĐẠI HỌC CÔNG NGHIỆP TP HỒ CHÍ MINH
KHOA: CÔNG NGHỆ ĐIỆN TỬ
MÔN: VI XỬ LÍ
BÀI TIỂU LUẬN
ĐỀ TÀI: TRÌNH BÀY VỀ BỘ ĐỊNH THỜI TRONG VI
ĐIỀU KHIỂN PIC16F877A
GVHD: Huỳnh Minh Ngọc
SVTH MSSV
Nguyễn Phú Huy 10261121
Nguyễn Ngọc Hà 10242381
Nguyễn Văn Tuấn 10058371
LỚP: DHDT6A
KHÓA: 2010-2014
Tp HCM ngày 09 tháng 11 năm 2012

2012
Trang2
LỜI MỞ ĐẦU
Ngày nay kỹ thuật vi điều khiển đã trở nên quen thuộc trong các ngành kỹ thuật và trong dân
dụng. Các bộ vi điều khiển có khả năng xử lý nhiều hoạt động phức tạp mà chỉ cần một chip vi
mạch nhỏ, nó đã thay thế các tủ điều khiển lớn và phức tạp bằng những mạch điện gọn nhẹ, dễ
dàng thao tác sử dụng.
Vi điều khiển không những góp phần vào kỹ thuật điều khiển mà còn góp phần to lớn vào
việc phát triển thông tin. Chính vì các lý do trên, việc tìm hiểu, khảo sát vi điều khiển là điều
mà các sinh viên ngành điện mà đặc biệt là chuyên ngành kỹ thuật điện-điện tử phải hết sức
quan tâm. Đó chính là một nhu cầu cần thiết và cấp bách đối với mỗi sinh viên, đề tài này được
thực hiện chính là đáp ứng nhu cầu đó.
Các bộ điều khiển sử dụng vi điều khiển tuy đơn giản nhưng để vận hành và sử dụng đươc
lại là một điều rất phức tạp. Phần công việc xử lý chính vẫn phụ thuộc vào con người, đó chính
là chương trình hay phần mềm. Nếu không có sự tham gia của con người thì hệ thống vi điều
khiển cũng chỉ là một vật vô tri. Do vậy khi nói đến vi điều khiển cũng giống như máy tính bao
gồm 2 phần là phần cứng và phần mềm.
Mặc dù vi điều khiển đã đi được những bước dài như vậy nhưng để tiếp cận được với kỹ
thuật này không thể là một việc có được trong một sớm một chiều. Để tìm hiểu bộ vi điều khiển
một cách khoa học và mang lại hiệu quả cao làm nền tản cho việc xâm nhập vào những hệ
thống tối tân hơn. Việc trang bị những kiến thức về vi điều khiển cho sinh viên là hết sức cần
thiết. Xuất phát từ thực tiển này nhóm chúng em đã đi đến quyết định TRÌNH BÀY VỀ BỘ
ĐỊNH THỜI TRONG VI ĐIỀU KHIỂN PIC16F877A nhằm đáp ứng nhu cầu ham muốn
học hỏi của bản thân và giúp cho các bạn sinh viên dễ tiếp cận và hiểu sâu hơn về VĐK PIC.
Nhóm chúng em xin chân thành cảm ơn!
TP.Hồ Chí Minh, ngày 9 tháng 11 năm 2012
I. Giới thiệu về vi điều khiển Pic 16F877A

2012
Trang3
1. Khái quát
- PIC là tên viết tắt của “Programmable Intelligent computer” do hãng General Instrument đặt
tên cho con vi điều khiển đầu tiên của họ.Hãng Micrchip tiếp tục phát triển sản phầm này và
cho đến hàng đã tạo ra gần 100 loại sản phẩm khác nhau.
- PIC16F887A là dòng PIC khá phổ biến, khá đầy đủ tính năng phục vụ cho hầu hết tất cả các
ứng dụng thực tế. Đây là dòng PIC khá dễ cho người mới làm quen với PIC có thể học tập
và tạo nền tản về họ vi điều khiển PIC của mình.
- PIC 16F877A thuộc họ vi điều khiển 16Fxxx có các đặt tính sau:
Ngôn ngữ lập trình đơn giản với 35 lệnh có độ dài 14 bit.
Tất cả các câu lệnh thực hiện trong 1 chu kì lệnh ngoại trừ 1 số câu lệnh rẽ nhánh thực
hiện trong 2 chu kì lệnh. Chu kì lệnh bằng 4 lần chu kì dao động của thạch anh.
Bộ nhớ chương trình Flash 8Kx14 words, với khả năng ghi xoá khoảng 100 ngàn lần.
Bộ nhớ Ram 368x8bytes.
Bộ nhớ EFPROM 256x8 bytes.
Khả năng ngắt (lên tới 14 nguồn cả ngắt trong và ngắt ngoài).
Ngăn nhớ Stack được chia làm 8 mức.
Truy cập bộ nhớ bằng địa chỉ trực tiếp hoặc gián tiếp.
Dải điện thế hoạt động rộng: 2.0V đến 5.5V.
Nguồn sử dụng 25mA.
Công suất tiêu thụ thấp:
<0.6mA với 5V, 4MHz
20uA với nguồn 3V, 32 kHz.
Có 3 timer: timer0, 8 bit chức năng định thời và bộ đếm với hệ số tỷ lệ trước.Timer1, 16
bit chức năng bộ định thời, bộ đếm với hệ số tỷ lệ trước, kích hoạt chế độ Sleep.Timer2,
8 bit chức năng định thời và bộ đếm với hệ số tỷ lệ trước và sau.
Có 2 kênh Capture/ so sánh điện áp (Compare)/điều chế độ rộng xung PWM 10 bit /
(CCP).
Có 8 kênh chuyển đổi ADC 10 bit.
2012
Trang4
Cổng truyền thong nối tiếp SSP với SPI phương thức chủ và I2C (chủ/phụ).Bộ truyền
nhận thông tin đồng bộ, dị bộ (USART/SCL) có khả năng phát hiện 9 bit địa chỉ.
Cổng phụ song song (PSP) với 8 bít mở rộng, với RD, WR và CS điều khiển.
\
.
.
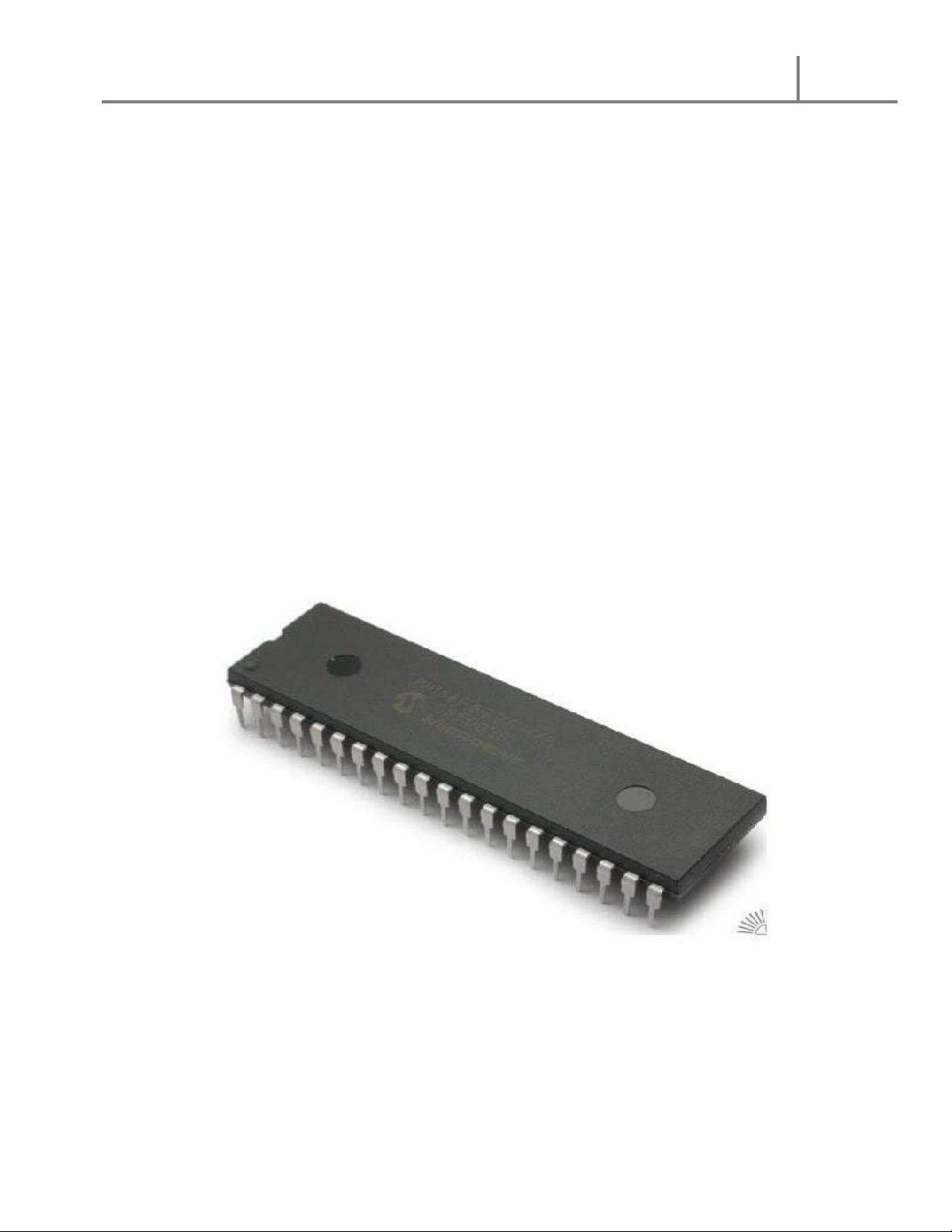
Hình: Hình ảnh 1 vi điều khiển PIC 16F877A
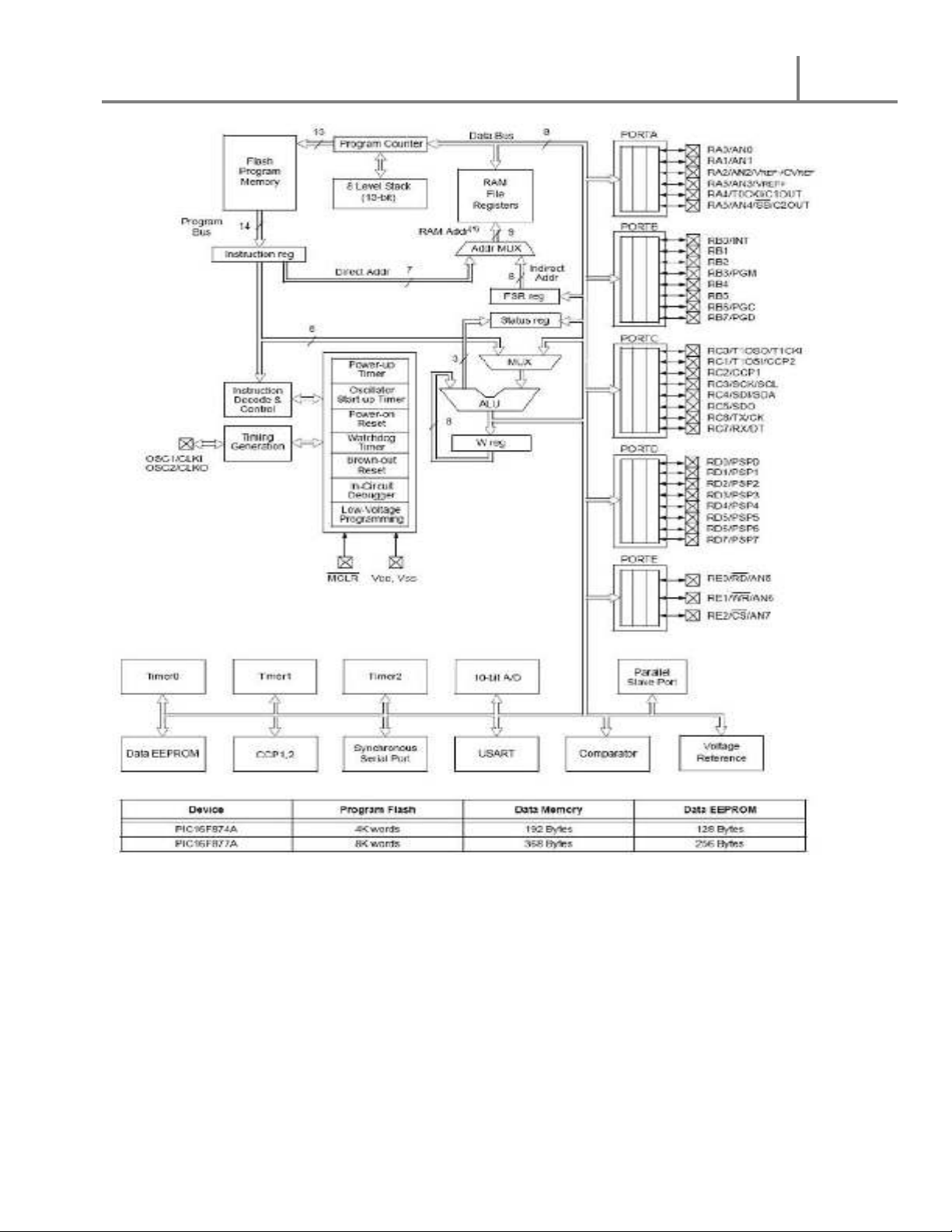
2. Sơ đồ khối
2012
Trang5
- Khối ALU – Arithmetic Logic Unit.
- Khối bộ nhớ chứa chương trình – Flash Program Memory.
- Khối bộ nhớ chứa dữ liệu EPROM – Data EPROM.
-Khối bộ nhớ file thanh ghi RAM – RAM file Register.
-Khối giải mã lệnh và điều khiển – Instruction Decode Control.
-Khối thanh ghi đặc biệt.


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)