TỔNGHỢPHỆTHỐNGĐIỀUKHIỂNCHOQUADROTOR
PhùngĐìnhKiên
Email:kiensuong9614@gmail.com
Ngàytòasoạnnhậnđượcbàibáo:07/05/2024
Ngàyphảnbiệnđánhgiá:14/11/2024
Ngàybàibáođượcduyệtđăng:28/11/2024
DOI:10.59266/houjs.2024.485
Tómtắt:Quadrotorđượcứngdụngnhiềutronggiámsátnúilửa,cháyrừng,kiểmtra
đườngdâyđiện,tìmkiếmngườithấtlạc,cứuhộthiêntai,....Quadrotorđượctrangbịbốn
độngcơvới4cánhquạtvớimụcđíchđiềukhiểnvàổnđịnhchuyểnđộngcủaquadrotor,điều
nàylàmchomôhìnhđộnglựchọccủaquadrotorphứctạpvàcósựphituyếnmạnh.
Bàibáo
tậptrungpháttriểnmôhìnhtoánquadrotor,thiếtkếbộđiềukhiểnPIDYjLQR,tiếnhànhmô
hìnhhóavàmôphỏngcácbộđiềukhiểntrênMatlab/Simulink.Cáckếtquảmôphỏngđược
đưarađểchứngminhtínhhiệuquảcủacácbộđiềukhiển.
Từkhóa:Tổnghợphệthốngđiềukhiển,Quadrotor,UAV,LQR,PID.
KhoaVôtuyếnđiệntử,TrườngSĩquanKhôngquân
I.Đặtvấnđề
Hiện nay,trên thế giới, thiết bị bay
khôngngườilái(haycòngọilà-UAV)ngày
càngpháttriểnvàđượcứngdụngrộngrãi
trongcảlĩnhvựcquânsựvàdânsự.Trong
đó,loạiQuadrotorđangđượcsửdụngphổ
thônghơnnhờvàocấutrúcđơngiản,tính
đốixứng,dễdàngthiếtkế,điềukhiểnvàcó
thểhoạtđộnglinhhoạttrongkhuvựcnhỏ.
Tuy nhiên, việc xây dựng một hệ thống
UAVhoànchỉnhkhôngđơngiảnvàtồntại
rấtnhiềurủironhưsaisốvềthiếtkếcácchi
tiếtphầncứng,thuậttoánhoạtđộngkhông
ổnđịnh,trongquátrìnhhoạtđộngcóthểgây
ranhữngtainạnngoàiýmuốnv.v.Việcthiết
kếmộtbộđiềukhiểnchothiếtbịlàmộtvấn
đềquantrọnghàngđầu.
Trongthựctếcórấtnhiềunghiêncứu
vềbộđiềukhiểnchoquadrotorcủanhiềutác
giảđưara.Trongbàibáonàytácgiảđisâu
tổnghợp2bộđiềukhiểnlà:bộđiềukhiển
PID và bộ điều khiểntốiưu toànphương
tuyếntínhLQR. Kếtquả được môphỏng
trên phần mềm Matlab/Simulink với các
thôngsốcủaquadrotorbấtkỳ,quađórútra
ưunhượcđiểmcủatừngbộđiềukhiển.
II.Cơsởlýthuyết
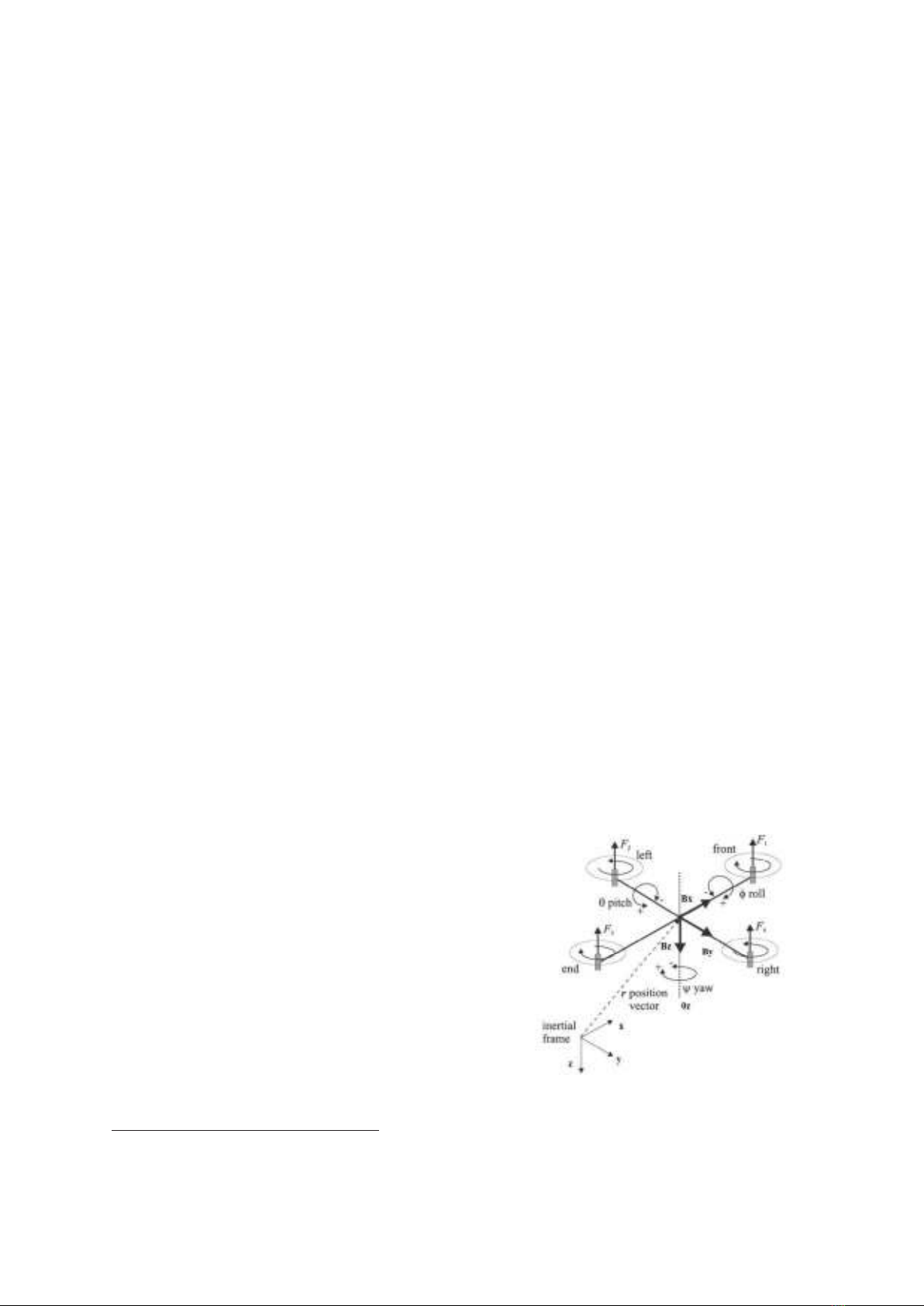
2.1. Biến đổi mô hình toán của
quadrotor
Hình1.HệtọađộđốivớiQuadrotor

Môhìnhtoáncủaquadrotordạngphituyến:[2][6]
(1)
Nhiệmvụcủabộđiềukhiểnlàđiều
chỉnh tọa độ vị trí
(x , y ,z )
và trạng
thái
( , , )Φ θ Ψ
ban đầu của quadrotor
vềtọađộvịtrí
d d d
(x , y , z )
vàtrạngthái
d d d
( , , )Φ θ Ψ
mongmuốn.Nhưvậy,việc
ổn định quỹ đạo của quadrotor sẽ được
thựchiệnthôngqua6kênhđiềukhiểnđó
là:kênhxdọctrụcox,kênhydọctrụcoy,
kênhđộcaozdọctrụcoz,kênh
Φ
,kênh
θ
vàkênhΨ.
Gọivectơ trạngtháicủaquadrotor
là
X
r
,
X
r
chứa 12 thành phần động học
của quadrotor theo thứ tự như sau:
X X( , , , , , ,z, z,x,x, y, y)= Φ Φ θ θ Ψ Ψ
r
&&
&& & &
Để thực hiện điều khiển, ta phân
chia trạng thái của quadrotor theo từng
kênhđiềukhiểntươngứng.Căncứvàohệ
phương trình (1) và vectơ trạng thái ta
thànhlậpcácphươngtrìnhđộnghọctương
ứngvớitừngkênhđiềukhiểnnhưsau.
Đốivớikênhđiềukhiểngócnghiêng
Φ,tacóhệphươngtrìnhđộnghọctương
ứngnhưsau:
(2)
Đặt
X= Φ
và
X= Φ
&
, do đó
X= Φ
&&
và
X= Φ
&&&
.Đặt
x 2
T U=
Từđó
suy ra mô hình dạng truyền ngược chặt
theokênhΦlà:
(3)
Đối vớikênh điều khiển góc chúc
ngócθ,tacũngcóhệphươngtrìnhđộng
họctươngứng:
(4)
Đặt
X= θ
và
X= θ
&
,dođó
X= θ
&
&
và
X= θ
&&
&
.Đặt
y 3
T U=
Từđósuyramô
hìnhdạngtruyềnngượcchặttheokênhθlà:
(5)
Đối vớikênh điều khiển góc chúc
hướngΨ,tacũngcóhệphươngtrìnhđộng
họctươngứng:
(6)
Đặt
X= Ψ
và
X= Ψ
&
, do đó
X= Ψ
& &
và
X= Ψ
& &&
.Đặt
z
T U=
Từđó
suy ra mô hình dạng truyền ngược chặt
theokênhΨ:
(7)

Đối với kênh z, ta có hệ phương
trìnhđộnghọc:
(8)
Đặt
X z=
và
X z=
&
,dođó
X z=
&&
và
X z=
&&&
.Đặt
L 1
F U=
.Từđósuyramô
hìnhdạngtruyềnngượcchặttheokênhzlà:
(9)
Đốivớikênhx,tacóhệphươngtrình
độnghọc:
(10)
Đặt
X x=
và
X x=
&, do đó
X z=
&&
và
X x=
&&&
.Từđósuyramôhình
dạngtruyềnngượcchặttheokênhxlà:
(11)
Trongđó
d d d
, ,Φ θ Ψ
làcácgócEuler
mongmuốn.
Đối với kênh y, ta có hệ phương
trìnhđộnghọc:
(12)
Đặt
X y=
và
X y=
&, do đó
X y=
&&
và
X y=
&&&
.Từđósuyramôhình
dạngtruyềnngượcchặttheokênhylà:
(13)
Đặt
yy zz
xx
J J
aJ
−
=
,
zz xx
yy
J J
aJ
−
=
,
xx yy
zz
J J
aJ
−
=,
xx
L
bJ
=
,
yy
L
bJ
=
,
zz
L
bJ
=
.
t 1 3
U cos(X )cos(X )=
.
x 1 3 5 1 5
U cos(X )sin(X )cos(X ) sin (X )sin(X )= +
y 1 3 5 1 5
U cos(X )sin(X )sin (X ) sin (X )cos(X )= −
Khiđó,phươngtrìnhtrạngtháiphituyếncódạng:
t 1
x 1
X
X X a b U
f (X,U)
X
f (X,U)
X X a b U
f (X, U)
X
f (X,U)
X X a b U
f (X,U)
X
f (X, U)
X f (X, U)
f (X,U) g u ( )U
m
f (X, U) X
f (X,U)
f (X,U) u ( )U
m
f (X, U) X
f (X,U)
+
+
+
= = =
− +
&
y 1
u ( )U
m
(14)
Ápdụngphươngpháptuyếntínhhóa,theo[7],saukhithựchiệntuyếntínhhóa,tanhận
đượcmôhìnhkhônggiantrạngtháituyếntínhnhưsau:
X
X
X
X
X
X
X
X
X
X
X
X
=
&
&
&
&
&
&
&
&
&
&
&
&
X0 b 0 0
X
X0 0 b 0
X
X0 0 0 b
X
X
X( ) 0 0 0
m
X
X
X
X
+
−
U
U
U
U
(15)
X
X
X
X
Y X U
Y X U
Y X U
Y X U
X
X
X
X
= +
(16)
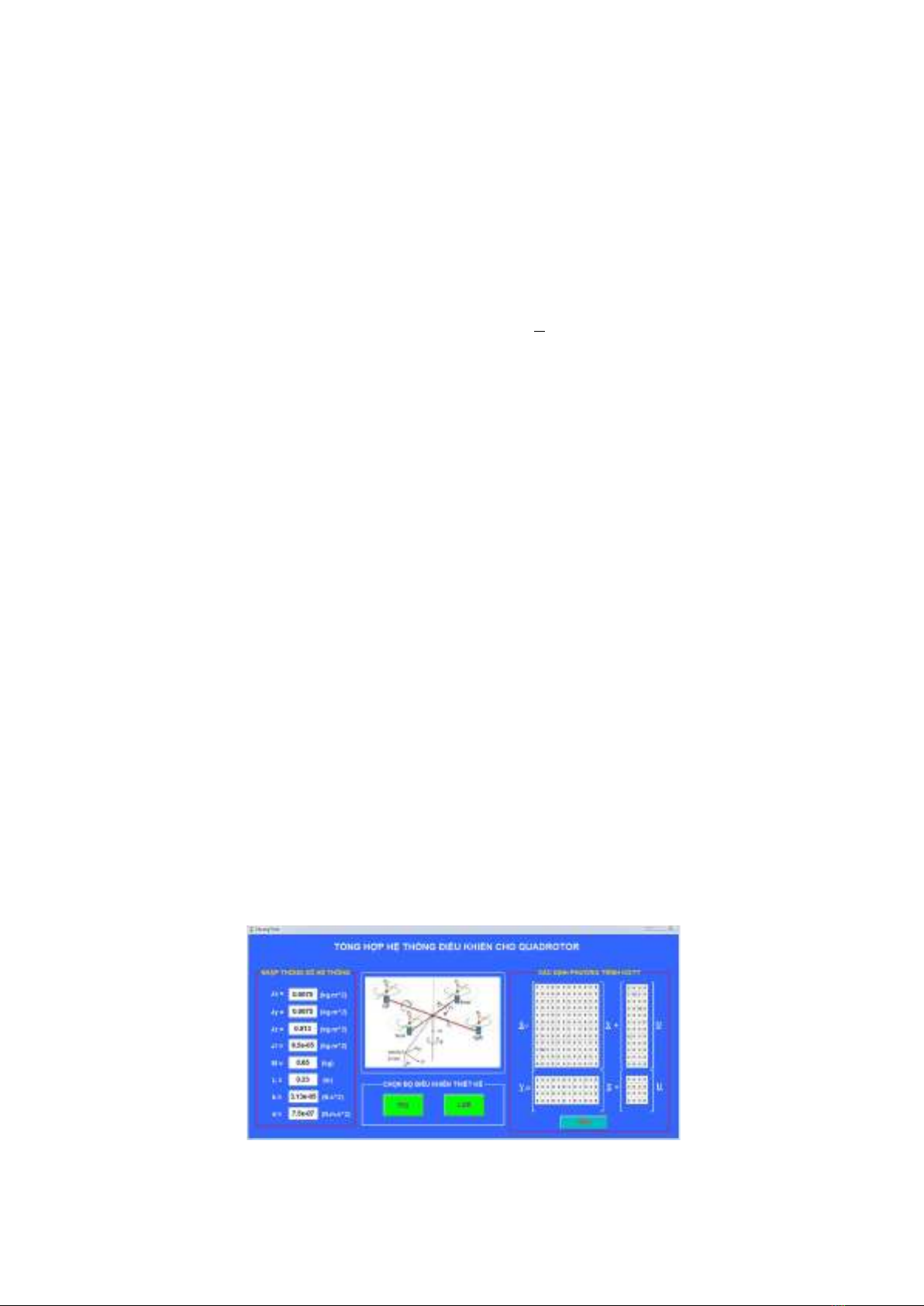
Hình2.GiaodiệnGUIchươngtrìnhTổnghợphệthốngđiềukhiểnchoQuadrotor
Nhưvậy,biếnđổimôhìnhtoánhọc
củaquadrotorthànhcáchệtruyềnngược
chặttheosáukênhđiềukhiển(x,y,z,Φ,θ,Ψ)
và tuyếntínhhóa, tasẽđưavề môhình
khônggiantrạngthái.Đâylàcơsởtrong
việctổnghợpbộđiềukhiểnPIDvàLQR.
Ứng với mỗi loại Quadrotor khác
nhausẽcóthôngsốhệthốngkhácnhau,
dođómôhìnhkhônggiantrạngtháicũng
đượcxácđịnhbởicácmatrậnđặctrưng
riêng. Với việc lập trình trên GUI của
MatLab,đầuvàolànhậpcácthôngsốhệ
thống của Quadrotor gồm: J
x
(Moment
quán tínhtheotrục x),J
y
(Momentquán
tính theo trục y), J
z
(Moment quán tính
theotrụcz),J
r
(Momentquántínhrotor),
M (khối lượng quadrotor), L (Khoảng
cáchtừtrọngtâmquadrotorđếntrụcđộng
cơ),b(lựcđẩy),d(lựckéo).Chươngtrình
sẽtựđộngtínhtoánvàxácđịnhphương
trìnhkhônggiantrạngtháiđặctrưngcho
môhìnhQuadrotor(hình2).
2.2.
XâydựngbộđiềukhiểnPID
choquadrotor
Trongphầnnày,tácgiảtổnghợpbộ
điềukhiển PID với mục đích khảo sátvà
đánhgiáchấtlượngđiềukhiểntrongchếđộ
ổnđịnhquỹđạochoquadrotor.Tổnghợpbộ
điềukhiểnthựchiệntheokênhđộcao.
Xétchếđộổnđịnhđộcao,trongđó
tínhiệuđầuvàokênhzlàz
d
códạnghàm
bậc thang đơn vị, còn tín hiệu đầu vào
kênhxvàytươngứnglàx
d
=0vày
d
=
0nhằmgiảmbớthiệntượngxenkênhdo
cáckênhđiềukhiểnảnhhưởnglẫnnhau.
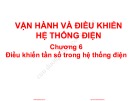
Luậtđiềukhiểnchokênhđộcaocó
dạngnhưsau:
d
1 p d i d d
d(z z)
U K .(z z) K (z z)dt K
dt
−
= − + − +
∫
(17)
Sơđồđiềukhiểntheokênhđộcao
đượcmôtảtronghình3.
Hình3.Sơđồđiềukhiểnkênhđộcao
2.3.
Xâydựngbộđiềukhiểntối
ưu toàn phương tuyến tính (LQR)
choquadrotor
Lý thuyết điều khiển điều khiển
LQR là một phương pháp điều khiển
mạnh để điềukhiểnhệ thống tuyếntính
đượcmôtảbằngphươngtrìnhtrạngthái.
KỹthuậtLQRtạorabộđiềukhiểnvòng
kínổnđịnhvớinănglượngcungcấpcho
hệthốnglànhỏnhất.
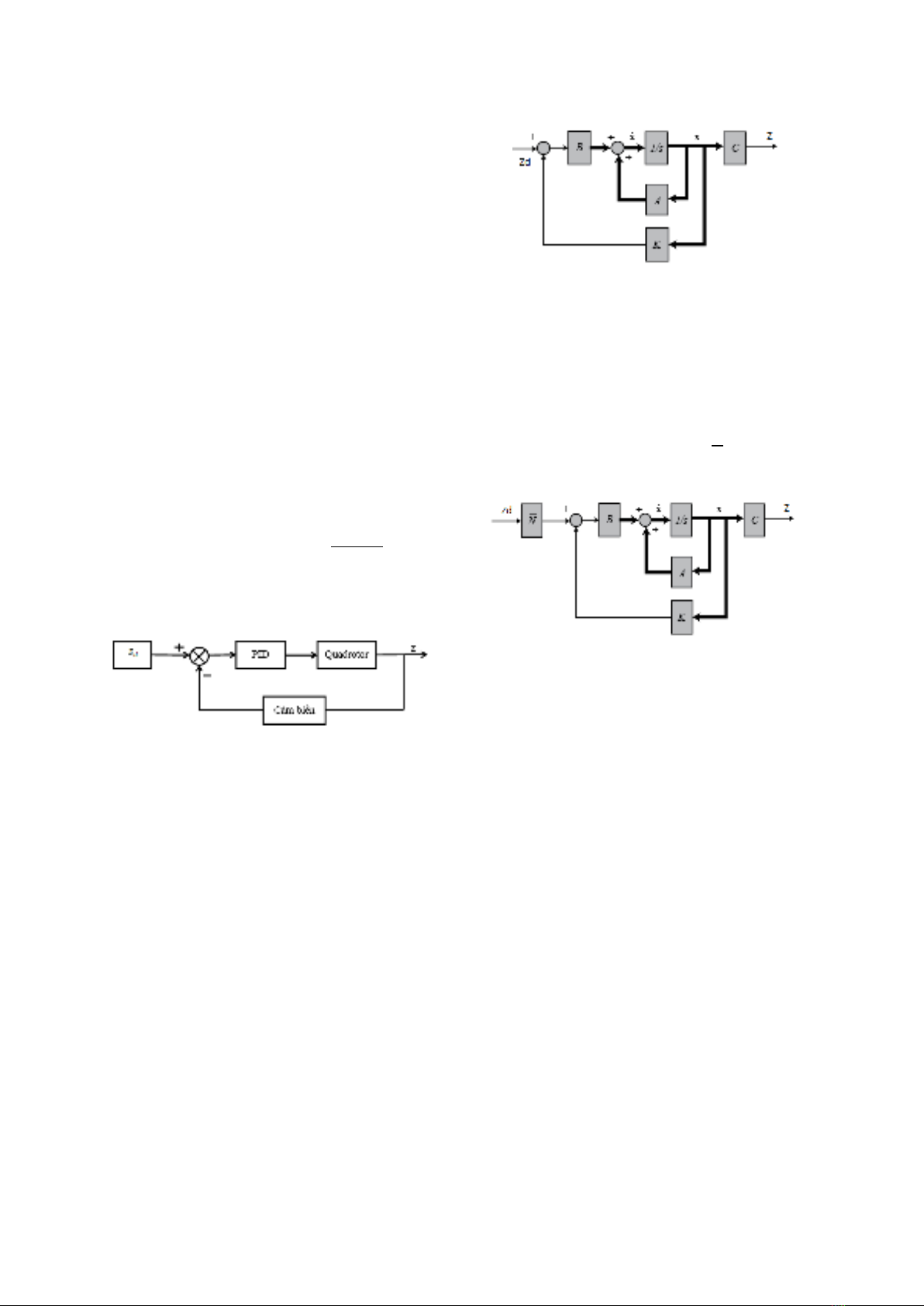
Hình4làmôhìnhđểđiềukhiểnvịtrí
củaquadrotortheokênhđộcaođượcxây
dựngbằngcáchchọnmatrậntrạngtháiA
vàBtừdạngkhônggiantrạngtháicủamô
hìnhvịtrí;vàmatrậnđộlợiKđượctính
từcácmatrậntrọnglượngQvàR.
Hình4.Môhìnhđiềukhiểnvịtrícủa
quadrotortheokênhđộcao
Thôngthường,đốivớihệthốngsử
dụngbộđiềukhiểnLQRsẽtồntạisaisố
xáclập,dovậytacầnthiếtkếthêmkhâu
bù,khâubùthựcchấtlàđưathêmlượng
điềukhiểntíchphânđầurađểđưasaisố
xáclậpvềkhông.Khâubù
N
đượcxác
địnhbởihệsốKbu.
Hình5.Môhìnhđiềukhiểnvịtrícủa
quadrotortheokênhđộcaokhiđưathêm
khâubù
III.Phươngphápnghiêncứu
Quátrìnhnghiêncứuđượctácgiảtiến
hànhtheophươngphápnghiêncứucơsởlý
thuyếtgắnvớimôphỏngđánhgiácácbộ
điềukhiểntrênphầnmềmmatlab/simulink.
3.1.Nghiêncứulýthuyết
-Nghiêncứulýthuyếtmôhìnhtoán
củaquadrotorvàcáchbiếnđổiđưavềdạng
môhìnhkhônggiantrạngtháituyếntính.
- Nghiên cứu lý thuyết cách xây
dựngcácbộđiềukhiểnPID,LQR.
- Ứng dụnglýthuyếtxâydựngbộ
điều khiển PID và LQR cho quadrotor
theokênhđộcao.
3.2.Nghiêncứuthựcnghiệm
-Kiểmchứngkếtquảxâydựngbộ
điềukhiểnPIDvàLQRchoquadrotortrên
phầnmềmmatlab/simulink.Từđó,rútra










![Đề thi Kỹ thuật lập trình PLC: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260121/lionelmessi01/135x160/85491768986870.jpg)

![Đề thi cuối học kì 1 môn Máy và hệ thống điều khiển số năm 2025-2026 [Kèm đáp án chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/dangnhuy09/135x160/4401768640586.jpg)




![Tự Động Hóa Thủy Khí: Nguyên Lý và Ứng Dụng [Chi Tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kexauxi10/135x160/27411767988161.jpg)






