
2
Th.S Nguyễn Minh Quân –Bộ môn Cơ sở thiết kế máy và Robot, Đại học Bách Khoa Hà Nội -https://sites.google.com/site/quannm187/
•Phân loại, thông số cơ bản
• Vật liệu và kết cấu
•Cơ sở tính toán
oCác dạng hỏng
oChỉ tiêu tính toán
oTải trọng danh nghĩa
oTải trọng tính toán
oỨng suất
• Phương pháp tính toán
oTính thiết kế
oTính kiểm nghiệm
Chương 5
Truyền động
bánh răng
3
Th.S Nguyễn Minh Quân –Bộ môn Cơ sở thiết kế máy và Robot, Đại học Bách Khoa Hà Nội -https://sites.google.com/site/quannm187/
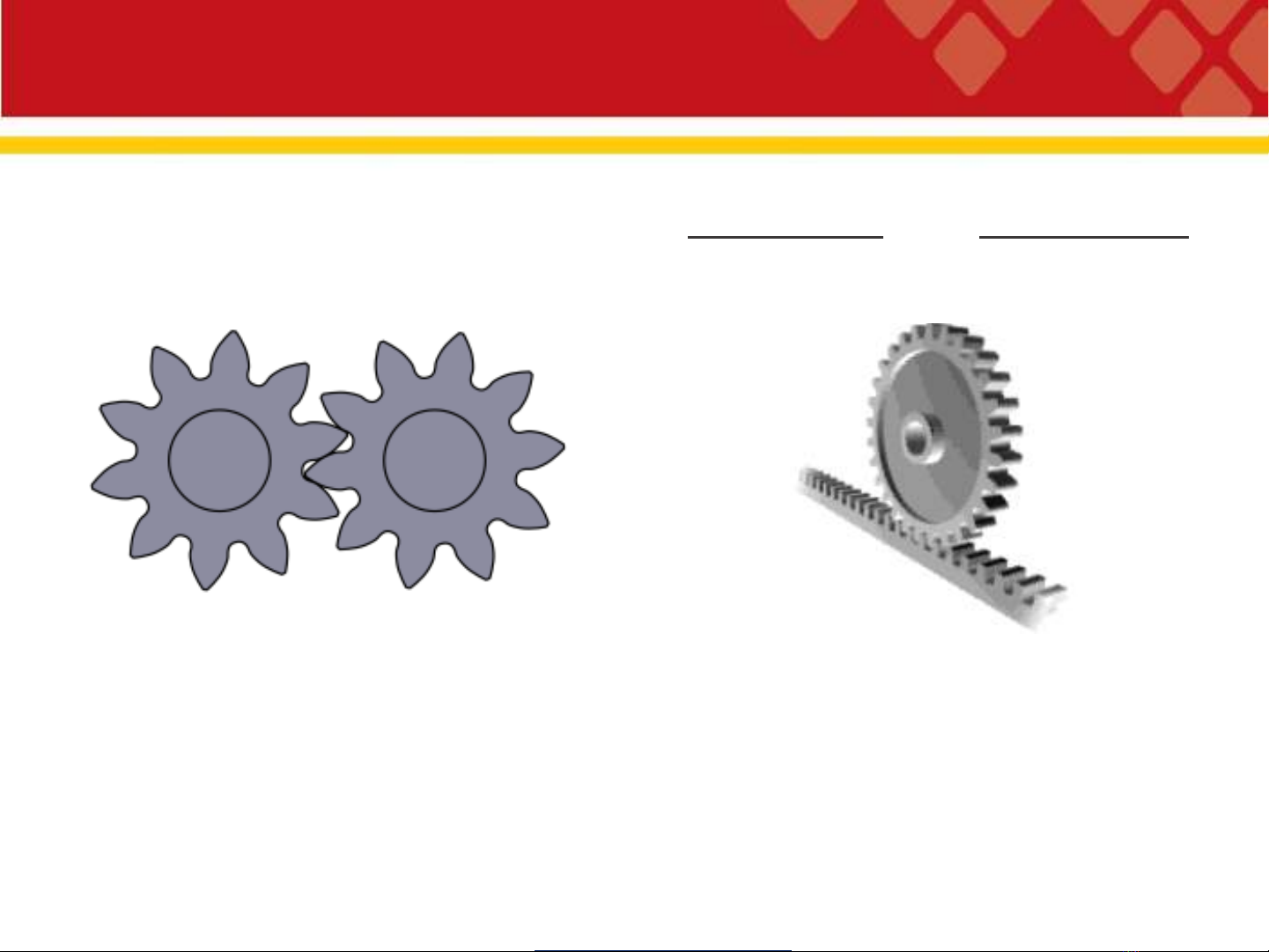
5.1 Nguyên lý truyền động
Nhờ sự ăn khớp của các răng trên bánh răng hay thanh răng

4
Th.S Nguyễn Minh Quân –Bộ môn Cơ sở thiết kế máy và Robot, Đại học Bách Khoa Hà Nội -https://sites.google.com/site/quannm187/
5.2 Phân loại
5.2.1 Vị trí giữa các trục
Song song
5
Th.S Nguyễn Minh Quân –Bộ môn Cơ sở thiết kế máy và Robot, Đại học Bách Khoa Hà Nội -https://sites.google.com/site/quannm187/
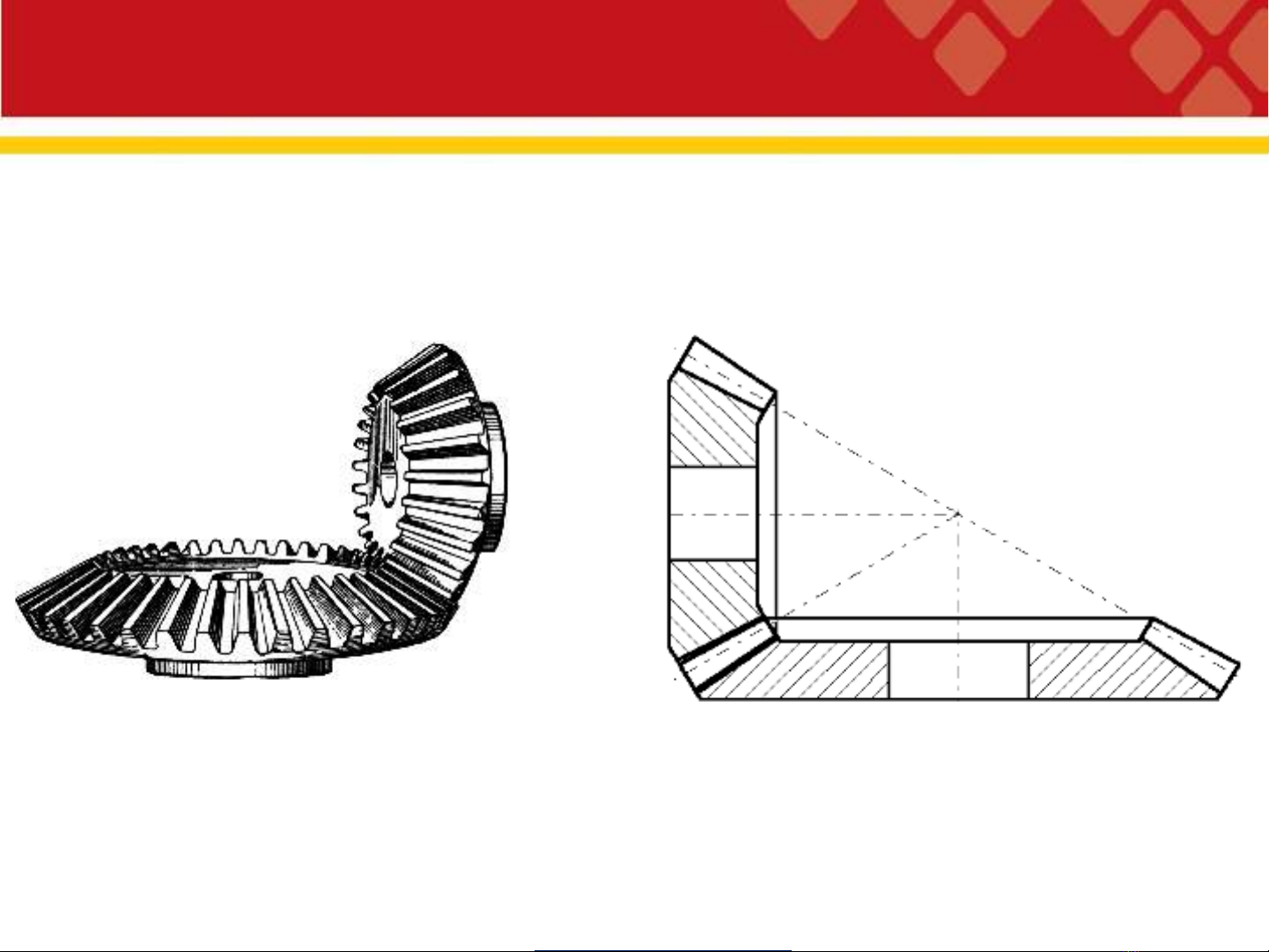
Giao nhau
5.2 Phân loại
5.2.1 Vị trí giữa các trục










![Bài giảng Ứng dụng tin học trong Kỹ thuật phương tiện thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251216/anhquangvu03@gmail.com/135x160/12021765937860.jpg)



![Bài tập tối ưu trong gia công cắt gọt [kèm lời giải chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251129/dinhd8055/135x160/26351764558606.jpg)








