TRƯỜNG ĐẠI HỌC PHẠM VĂN ĐỒNG
KHOA KỸ THUẬT CÔNG NGHỆ
BÀI GIẢNG
HỆ THỐNG
ĐIỀU KHIỂN TỰ ĐỘNG
Bậc học: CAO ĐẲNG
GV: Nguyễn Đình Hoàng
Bộ môn: Điện - Điện tử
Khoa: Kỹ thuật Công nghệ
Quảng Ngãi, năm 2016
TRƯỜNG ĐẠI HỌC PHẠM VĂN ĐỒNG
KHOA KỸ THUẬT CÔNG NGHỆ
BÀI GIẢNG
HỆ THỐNG
ĐIỀU KHIỂN TỰ ĐỘNG
Bậc học: CAO ĐẲNG
SỐ TÍN CHỈ: 3
GV: Nguyễn Đình Hoàng
Bộ môn: Điện - Điện tử
Khoa: Kỹ thuật Công nghệ
Quảng Ngãi, năm 2016

Lời nói đầu
Nhằm đáp ứng cho việc giảng dạy môn Lý thuyết Điều khiển tự động bậc Cao Đẳng,
tác giả đã biên soạn bài giảng này nhằm làm tài liệu học tập cho các lớp chuyên ngành
Kỹ thuật Điện- Điện tử tại Đại học Phạm Văn Đồng. Tài liệu này được sử dụng cho sinh
viên các lớp Cao đẳng với thời lượng 45 tiết (3TC). Tác giả hy vọng rằng đây sẽ là tài
liệu thiết thực cho các bạn sinh viên.
Trong quá trình biên soạn, chắc chắn tài liệu không tránh khỏi có những sai sót.
Mọi góp ý xin gửi về địa chỉ Nguyễn Đình Hoàng - Khoa Kỹ Thuật Công Nghệ -
Trường Đai học Phạm Văn Đồng. Xin chân thành cảm ơn.
Tác giả

MỤC LỤC
Chương 1: MÔ TẢ TOÁN HỌC HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
LIÊN TỤC.............................................................................................................. 1
Chương 2: ĐẶC TÍNH ĐỘNG HỌC CỦA CÁC KHÂU CƠ BẢN VÀ CỦA
HỆ THỐNG ĐKTĐ LIÊN TỤC……………………………………………….. 19
Chương 3: KHẢO SÁT TÍNH ỔN ĐỊNH CỦA HỆ THỐNG ĐKTĐ
LIÊN TỤC…………………………………………………………………… . 46
Chương 4: KHẢO SÁT CHẤT LƯỢNG HỆ THỐNG ĐKTĐ LIÊN TỤC…….. 70
Chương 5: TỔNG HỢP HỆ THỐNG ĐKTĐ LIÊN TỤC……………………...... 83
Phụ lục…………………………………………………………………… 105
Tài liệu tham khảo………………………………………………………… 106
1
CHƯƠNG 1: MÔ TẢ TOÁN HỌC HỆ THỐNG ĐKTĐ LIÊN TỤC
1.1 Khái niệm.
1.1.1 Giới thiệu chung về hệ thống điều khiển tự động.
Một câu hỏi khá phổ biến với những người mới làm quen với lý thuyết điều khiển
là “Điều khiển là gì?”. Để có khái niệm về điều khiển chúng ta xét ví dụ sau. Giả sử
chúng ta đang lái xe trên đường, chúng ta muốn xe chạy với tốc độ cố định 40km/h. Để
đạt được điều này mắt chúng ta phải quan sát đồng hồ đo tốc độ để biết được tốc độ của
xe đang chạy. Nếu tốc độ xe dưới 40km/h thì ta tăng ga, nếu tốc độ xe trên 40km/h thì
ta giảm ga. Kết quả của quá trình trên là xe sẽ chạy với tốc độ “gần” bằng tốc độ mong
muốn. Quá trình lái xe như vậy chính là quá trình điều khiển. Trong quá trình điều khiển
chúng ta cần thu thập thông tin về đối tượng cần điều khiển (quan sát đồng hồ đo tốc độ
để thu thập thông tin về tốc độ xe), tùy theo thông tin thu thập được và mục đích điều
khiển mà chúng ta có cách xử lý thích hợp (quyết định tăng hay giảm ga), cuối cùng ta
phải tác động vào đối tượng (tác động vào tay ga) để hoạt động của đối tượng theo đúng
yêu cầu mong muốn.
Điều khiển là quá trình thu thập thông tin, xử lý thông tin và tác động lên hệ thống
để đáp ứng của hệ thống “gần” với mục đích định trước. Điều khiển tự động là quá trình
điều khiển không cần sự tác động của con người.
Trong những năm gần đây, các hệ thống điều khiển (HTĐK) càng có vai trò quan trọng
trong việc phát triển và sự tiến bộ của kỹ thuật công nghệ và văn minh hiện đại. Thực tế
mỗi khía cạnh của hoạt động hằng ngày đều bị chi phối bởi một vài loại hệ thống điều
khiển. Dễ dàng tìm thấy hệ thống điều khiển máy công cụ, kỹ thuật không gian và hệ
thống vũ khí, điều khiển máy tính, các hệ thống giao thông, hệ thống năng lượng, robot,...
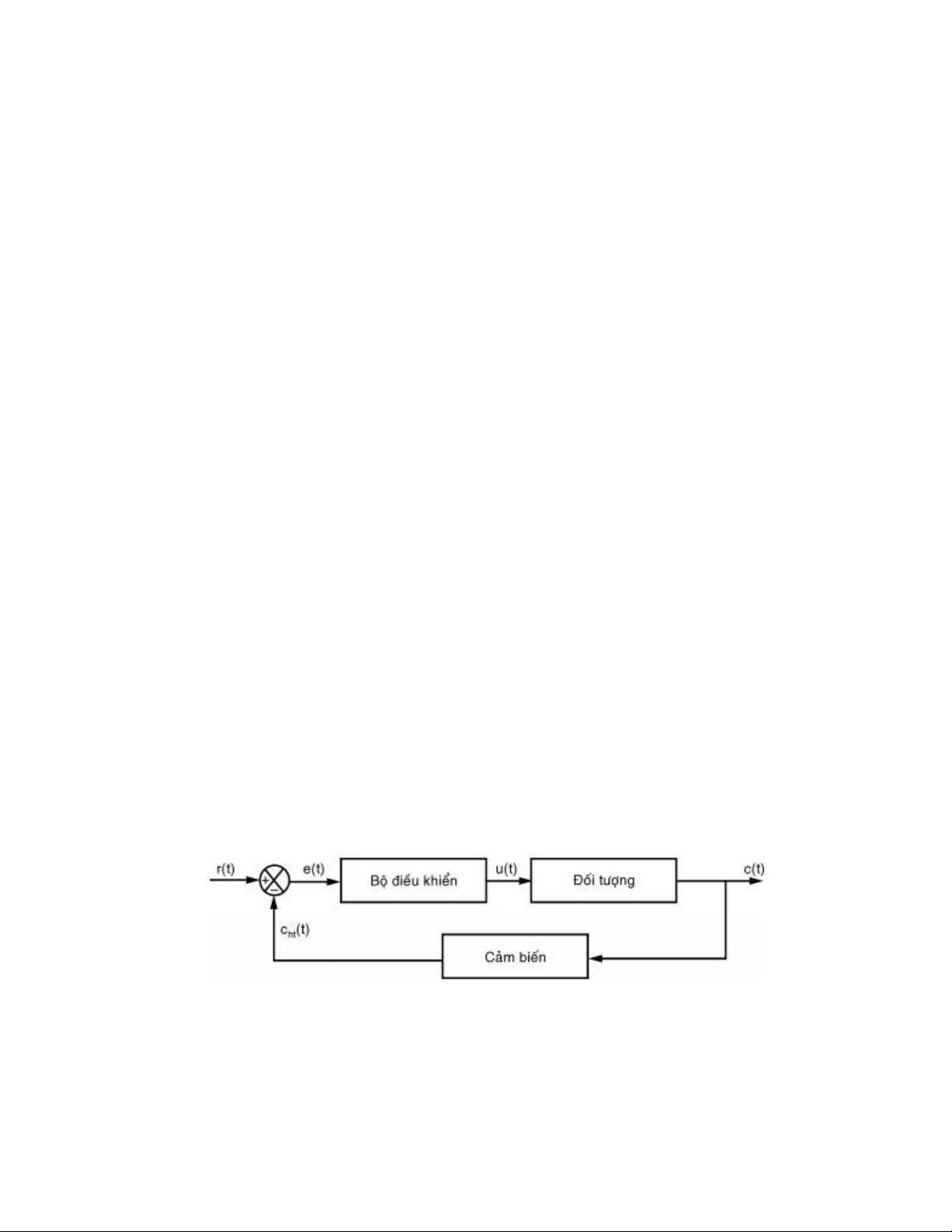
1.1.2 Các thành phần cơ bản của hệ thống điều khiển
Hình 1.1 Sơ đồ khối hệ thống điều khiển
Chú thích các ký hiệu viết tắt:
- r(t) (reference input): tín hiệu vào, tín hiệu chuẩn
- c(t) (controlled output): tín hiệu ra





![Giáo trình Điều khiển thủy lực, khí nén - Trường ĐH Kỹ thuật Công nghiệp Thái Nguyên [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260224/diegomaradona04/135x160/83961772004808.jpg)
![Tài liệu giảng dạy Lý thuyết điều khiển tự động - Trường Đại học Quy Nhơn [Tài liệu đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240930/gaupanda055/135x160/7741727689830.jpg)
![Giáo trình Lắp đặt Hệ thống Thiết bị Điều khiển Tự động - Trường CĐ nghề Số 20 [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240830/xuanphongdacy04/135x160/79237101.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)