
i
MỤC LỤC
Lời nói đầu
Chƣơng 1: ĐẠI CƢƠNG VỀ HỆ THỐNG TỰ ĐỘNG .................................................................. 3
Chƣơng 2: MÔ TẢ TOÁN HỌC PHẦN TỬ VÀ HỆ THỐNG ĐIỀU KHIỂN ............................ 12
Chƣơng 3: ĐẶC TÍNH ĐỘNG HỌC CỦA HỆ THỐNG ............................................................ 55
Chƣơng 4: KHẢO SÁT TÍNH ỔN ĐỊNH HỆ THỐNG ĐIỀU KHIỂN ...................................... 71
Chƣơng 5: ĐÁNH GIÁ CHẤT LƢỢNG HỆ THỐNG ............................................................... 93
Chƣơng 6: THIẾT KẾ HỆ THỐNG LIÊN TỤC ........................................................................ 104
Chƣơng 7: MÔ TẢ TOÁN HỌC HỆ THỐNG RỜI RẠC ......................................................... 144
Chƣơng 8: THIẾT KẾ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC .................................................. 171
Chƣơng 9: HỆ THỐNG ĐIỀU KHIỂN PHI TUYẾN ................................................................ 206
Phụ lục Bảng biến đổi Laplace .................................................................................................. 224

ii
LỜI NÓI ĐẦU
Lý thuyết điều khiển tự động là môn học dành cho sinh viên ngành Điện tử - Tự
động. Giáo trình Lý thuyết điều khiển tự động gồm có chín chƣơng:
Chƣơng 1: Đại cƣơng về hệ thống điều khiển tự động
Chƣơng 2: Mô tả toán học phần tử và hệ thống điều khiển
Chƣơng 3: Đặc tính động học của hệ thống tự động
Chƣơng 4: Khảo sát tính ổn định của hệ thống tự động
Chƣơng 5: Đánh giá chất lƣợng hệ thống điều khiển tự động
Chƣơng 6: Thiết kế hệ thống điều khiển liên tục
Chƣơng 7: Mô tả toán học hệ thống rời rạc
Chƣơng 8: Thiết kế hệ thống điều khiển rời rạc
Chƣơng 9: Hệ thống điều khiển phi tuyến
Đây là những nội dung tóm tắt giúp sinh viên tiếp thu đƣợc môn học một cách nhanh
chóng. Lần đầu biên soạn chắc chắn còn nhiều thiếu sót, mong nhận đƣợc sự những ý
kiến đóng góp của các bạn đồng nghiệp.
Bộ môn Điều khiển tự động
Ths. Trần Thị Hoàng Oanh
Chương 1: Đại cương về hệ thống tự động
3
Chƣơng 1
ĐẠI CƢƠNG VỀ
HỆ THỐNG ĐIỀU KHIỂN TỰ ĐỘNG
1.1. KHÁI NIỆM ĐIỀU KHIỂN
Thí dụ 1: Lái xe với tốc độ 100km/h
- Mắt quan sát đồng hồ đo tốc độ v
thu thập thông tin
- Bộ não điều khiển tăng tốc nếu v < 100km/h
giảm tốc nêu v > 100km/h
xử lý thông tin
- Tay giảm ga hoặc tăng ga
tác động lên hệ thống
Kết quả của quá trình điểu khiển trên: xe chạy với tốc độ “gần” bằng 100km/h
Định nghĩa: Điều khiển là quá trình thu thập thông tin, xử lý thông tin và tác
động lên hệ thống để đáp ứng của hệ thống “gần” với mục đích định trƣớc.
Khái niệm điều khiển trên là một khái niệm rất rộng, môn học này chỉ nghiên cứu lý
thuyết điều khiển các hệ thống kỹ thuật
Điều khiển tự động: là quá trình điều khiển không cần sự tác động của con
ngƣời
Tại sao cần phải điều khiển: vì
- Con ngƣời không thỏa mãn với đáp ứng của hệ thống.
TD:
Điều hoà nhiệt độ vì không thỏa mãn với nhiệt độ nóng quá hoặc lạnh quá.
Ổn áp vì không thoả mãn với việc điện áp thay đổi thất thƣờng .
- Muốn tăng độ chính xác, hiệu quả kinh tế.
Các thành phần cơ bản của hệ thống điều khiển:
Hệ thống điều khiển gồm 3 thành phần cơ bản:
- Đối tƣợng điều khiển
- Cảm biến (hay thiết bị đo lƣờng)
- Bộ điều khiển
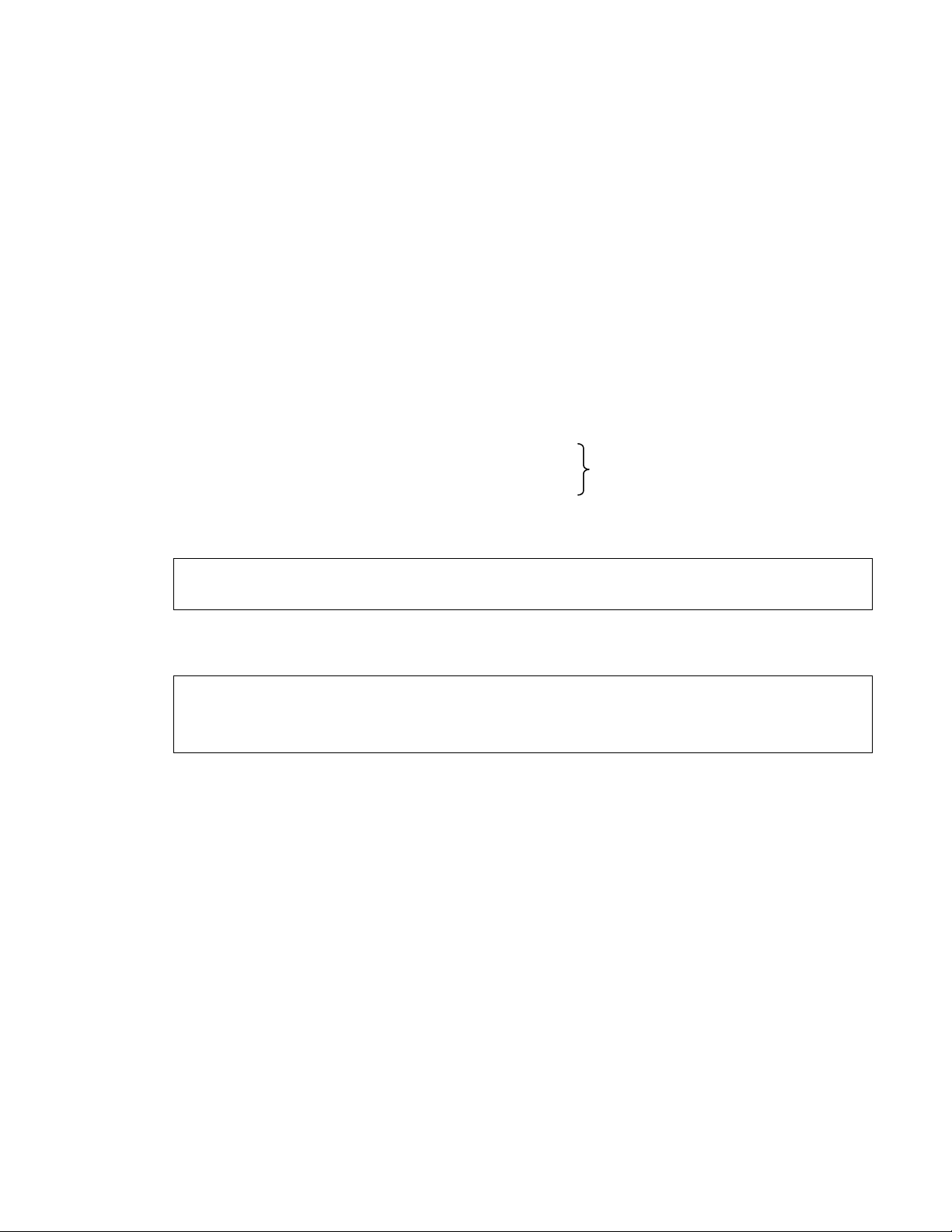
Sơ đồ khối hệ thống điều khiển thường gặp:
Chương 1: Đại cương về hệ thống tự động
4
Các ký hiệu viết tắt:
- r(t) (reference input): tín hiệu vào, tín hiệu chuẩn.
- c(t) (controlled output): tín hiệu ra
- cht(t): tín hiệu hồi tiếp
- e(t) (error): sai số
- u(t): tín hiệu điều khiển
Câu hỏi: Các thành phần cơ bản trong hệ thống lái xe trong TD1 là gì?
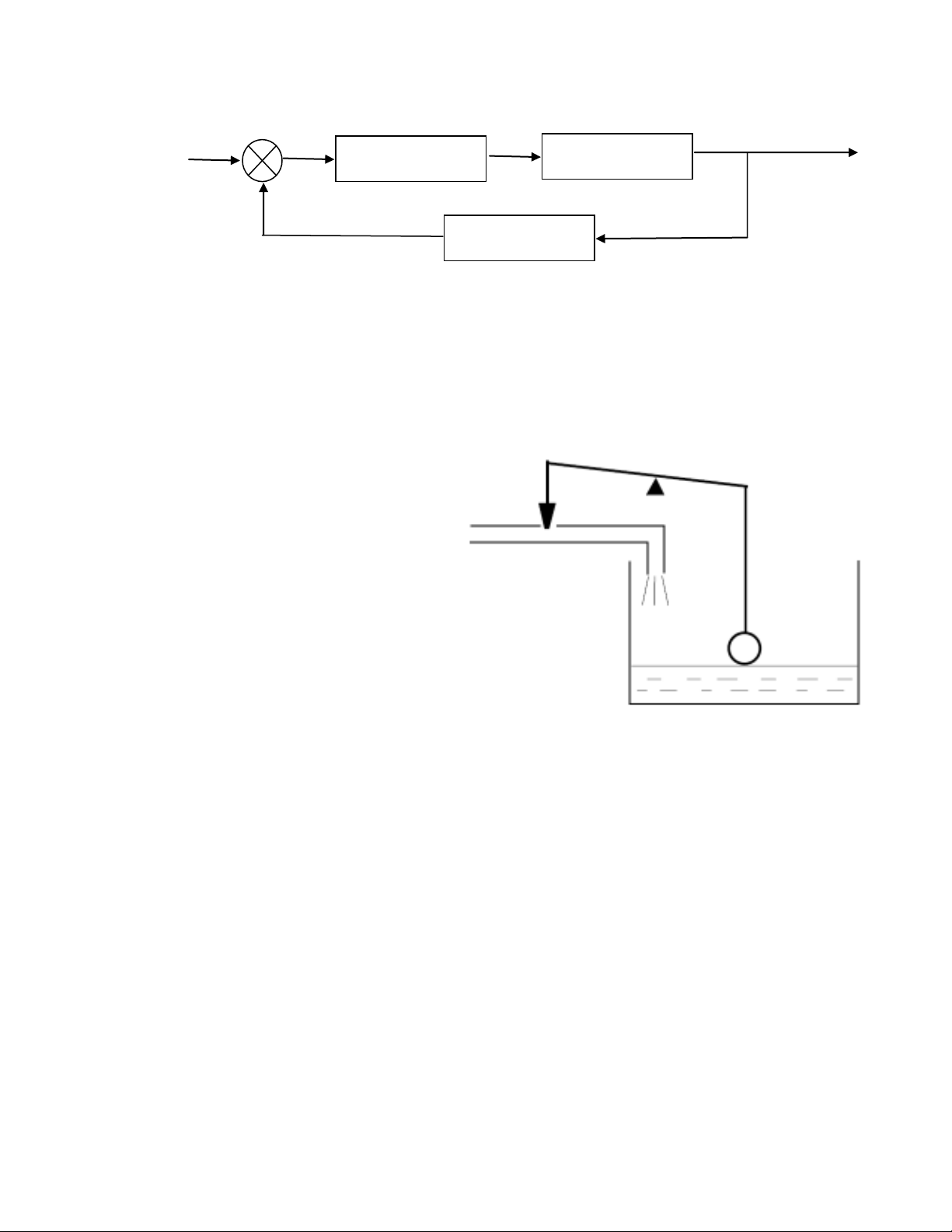
Thí dụ 2: Hãy xác định các thành phần
cơ bản trong hệ thống điều khiển mực
nƣớc đơn giản trong hình vẽ
Các bài toán cơ bản trong lĩnh vực điều khiển tự động:
Trong lĩnh vực điều khiển tự động có 3 vấn đề cần giải quyết là:
Phân tích hệ thống: Cho hệ thống tự động đã biết cấu trúc và thông số. Bài toán đặt
ra là tìm đáp ứng của hệ thống và đánh giá chất lƣợng.
Thiết kế hệ thống: Biết cấu trúc và thông số của đối tƣợng điều khiển. Bài toán đặt
ra là thiết kế bộ điều khiển để đƣợc hệ thống thỏa mãn các yêu cầu về chất lƣợng.
Nhận dạng hệ thống: Chƣa biết cấu trúc và thông số của hệ thống. Vấn đề đặt ra là
xác định cấu trúc và thông số của hệ thống.
Trong môn học này chỉ giải quyết bài toán phân tích và thiết kế hệ thống. Bài toán
nhận dạng hệ thống sẽ đƣợc nghiên cứu trong môn học khác.
1.2. CÁC NGUYÊN TẮC ĐIỀU KHIỂN
Các nguyên tắc điều khiển có thể xem là kim chỉ nam để thiết kế hệ thống điều
khiển đạt chất lƣợng cao và có hiệu quả kinh tế nhất.
u(t)
Bộ điều khiển
Đối tƣợng
Cảm biến
r(t)
c(t)
cht(t)
e(t)
Chương 1: Đại cương về hệ thống tự động
5
Nguyên tắc 1: Nguyên tắc thông tin phản hồi
Muốn quá trình điều khiển đạt chất lƣợng cao, trong hệ thống phải tồn tại hai dòng
thông tin: 1 từ bộ điều khiển đến đối tƣợng và 1 từ đối tƣợng ngƣợc về bộ điều khiển
(dòng thông tin ngƣợc gọi là hồi tiếp).
Điều khiển không hồi tiếp (điều khiển vòng hở) không thề đạt chất lƣợng cao, nhất
là khi có nhiễu.
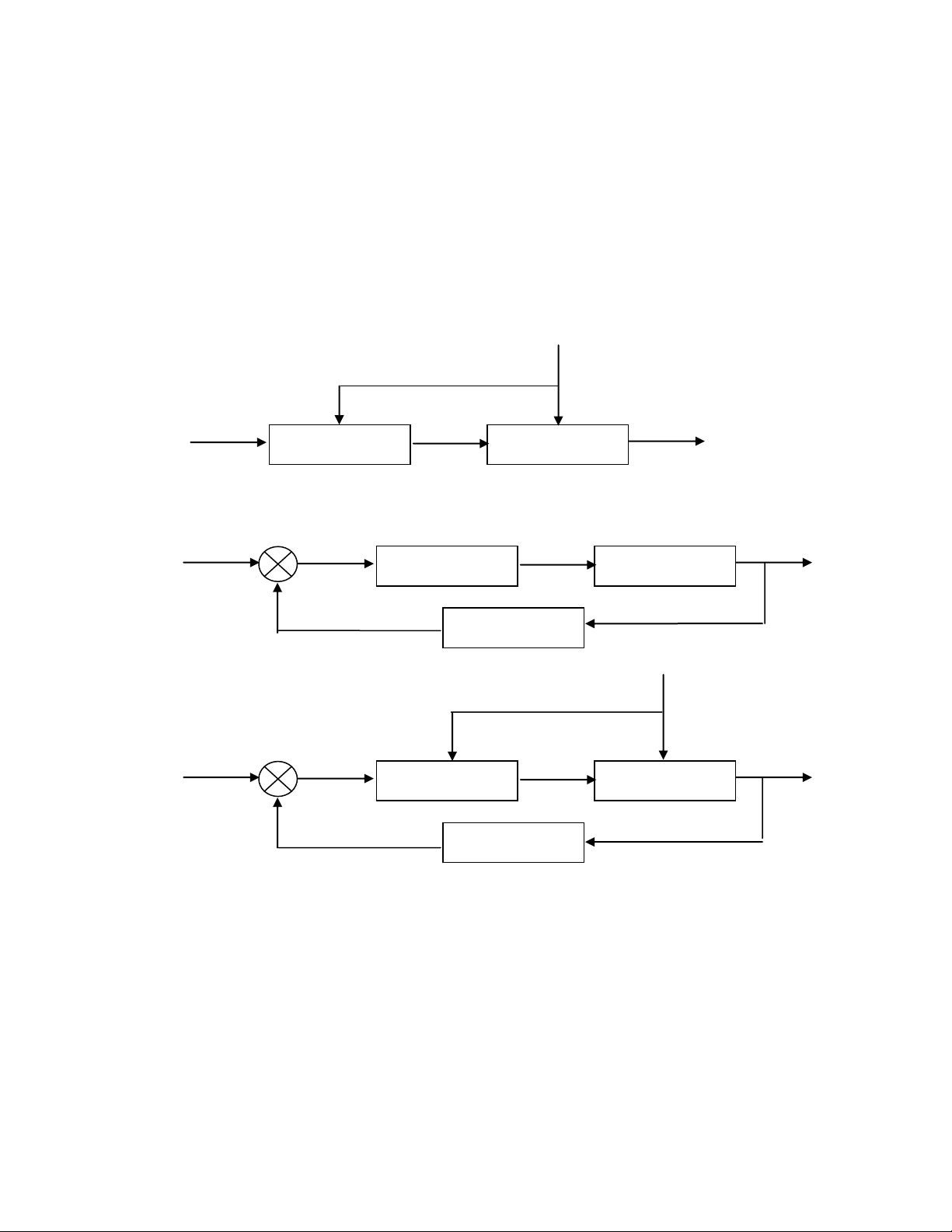
Các sơ đồ điều khiển dựa trên nguyên tắc thông tin phản hồi là:
Điều khiển bù nhiễu:
Điều khiển san bằng sai lệch:
Điều khiển phối hợp:
Nguyên tắc 2: Nguyên tắc đa dạng tƣơng xứng
Muốn quá trình điều khiển có chất lƣợng thì sự đa dạng của bộ điều khiển phải
tƣơng xứng với sự đa dạng của đối tƣợng. Tính đa dạng của bộ điều khiển thể hiện ở khả
năng thu thập thông tin, lƣu trữ thông tin, truyền tin, phân tích xử lý, chọn quyết định,…
Ý nghĩa: Cần thiết kế bộ điều khiển phù hợp với đối tƣợng.
Thí dụ: Hãy so sánh yêu cầu chất lƣợng điều khiển và bộ điều khiển sử dụng trong
các hệ thống sau:
Bộ điều khiển
Đối tƣợng
r(t)
u(t)
cht(t)
Cảm biến
e(t)
c(t)
n(t)
+
-
Bộ điều khiển
Đối tƣợng
r(t)
u(t)
cht(t)
Cảm biến
e(t)
c(t)
+
-
Bộ điều khiển
Đối tƣợng
r(t)
u(t)
c(t)
n(t)




![Giáo trình Điều khiển thủy lực, khí nén - Trường ĐH Kỹ thuật Công nghiệp Thái Nguyên [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260224/diegomaradona04/135x160/83961772004808.jpg)
![Tài liệu giảng dạy Lý thuyết điều khiển tự động - Trường Đại học Quy Nhơn [Tài liệu đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240930/gaupanda055/135x160/7741727689830.jpg)
![Giáo trình Lắp đặt Hệ thống Thiết bị Điều khiển Tự động - Trường CĐ nghề Số 20 [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240830/xuanphongdacy04/135x160/79237101.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)