Chương 6: Thiết kế hệ thống điều khiển liên tục
104
C
Ch
hư
ươ
ơn
ng
g
6
6
T
TH
HI
IẾ
ẾT
T
K
KẾ
Ế
H
HỆ
Ệ
T
TH
HỐ
ỐN
NG
G
Đ
ĐI
IỀ
ỀU
U
K
KH
HI
IỂ
ỂN
N
L
LI
IÊ
ÊN
N
T
TỤ
ỤC
C
6.1. KHÁI NIỆM
Thiết kế là toàn bộ quá trình bổ sung các thiết bị phần cứng cũng nhƣ thuật toán
phần mềm vào hệ cho trƣớc để đƣợc hệ mới thỏa mãn yêu cầu về tính ổn định, độ chính
xác, đáp ứng quá độ,… Có nhiều cách bổ sung bộ điều khiển vào hệ thống cho trƣớc,
trong khuôn khổ quyển giáo trình này chúng ta chủ yếu xét hai cách sau:
• Cách 1: thêm bộ điều khiển nối tiếp với hàm truyền của hệ hở, phƣơng pháp này gọi là
hiệu chỉnh nối tiếp. Bộ điều khiển đƣợc sử dụng có thể là bộ hiệu chỉnh sớm pha, trễ pha,
sớm trễ pha,P, PD, PI, PID,… Để thiết kế hệ thống hiệu chỉnh nối tiếp chúng ta có thể sử
dụng phƣơng pháp QĐNS hay phƣơng pháp biểu đồ Bode. Ngoài ra một phƣơng pháp
cũng thƣờng đƣợc sử dụng là thiết kế theo đặc tính quá độ chuẩn.
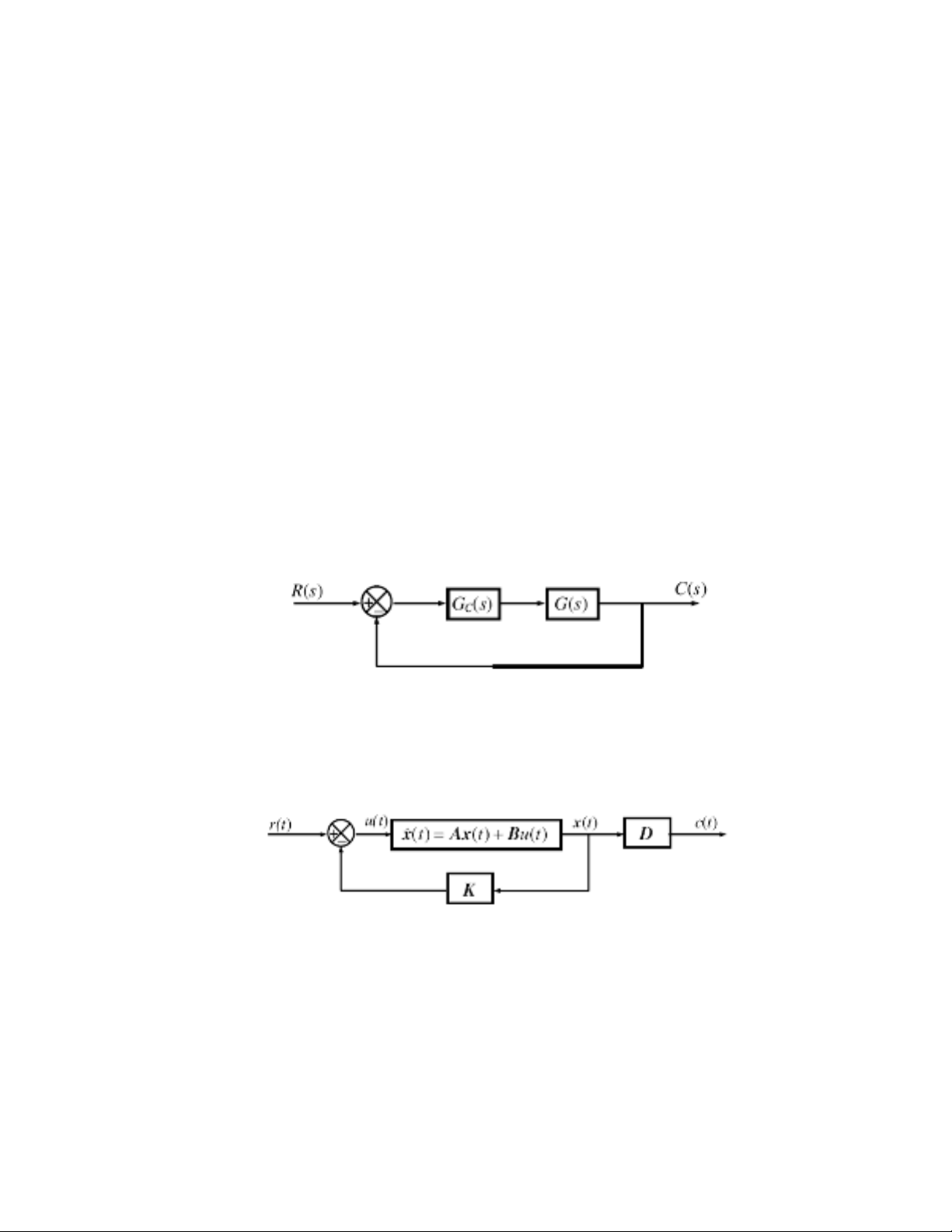
Hình 6.1. Hệ thống hiệu chỉnh nối tiếp
• Cách 2: điều khiển hồi tiếp trạng thái, theo phƣơng pháp này tất cả các trạng thái của
hệ thống đƣợc phản hồi trở về ngõ vào và tín hiệu điều khiển có dạng
)()()( tKxtrtu
.
Tùy theo cách tính vector hồi tiếp trạng thái K mà tacó phƣơng pháp điều khiển phân bố
cực, điều khiển tối ƣu LQR,….
Hình 6.2. Hệ thống điều khiển hồi tiếp trạng thái
Quá trình thiết kế hệ thống là quá trình đòi hỏi tính sáng tạo do trong khi thiết kế
thƣờng có nhiều thông số phải chọn lựa. Ngƣời thiết kế cần thiết phải hiểu đƣợc ảnh
hƣởng của các khâu hiệu chỉnh đến chất lƣợng của hệ thống và bản chất của từng phƣơng
pháp thiết kế thì mới có thể thiết kế đƣợc hệ thống có chất lƣợng tốt. Do đó các phƣơng
pháp thiết kế trình bày trong chƣơng này chỉ mang tính gợi ý, đó là những cách thƣờng
đƣợc sử dụng chứ không phải là phƣơng pháp bắt buộc phải tuân theo. Việc áp dụng một
Chương 6: Thiết kế hệ thống điều khiển liên tục
105
cách máy móc thƣờng không đạt đƣợc kết quả mong muốn trong thực tế. Dù thiết kế theo
phƣơng pháp nào yêu cầu cuối cùng vẫn là thỏa mãn chất lƣợng mong muốn, cách thiết
kế, cách chọn lựa thông số không quan trọng.
Trƣớc khi xét đến các phƣơng pháp thiết kế bộ điều khiển, chúng ta xét ảnh hƣởng
của các bộ điều khiển đến chất lƣợng của hệ thống. Chƣơng này chỉ trình bày bộ điều
khiển dƣới dạng mô tả toán học, mạch điều khiển cụ thể xem lại chƣơng 2.
6.2. ẢNH HƢỞNG CỦA CÁC BỘ ĐIỀU KHIỂN ĐẾN CHẤT LƢỢNG CỦA HỆ
THỐNG
6.2.1. Ảnh hƣởng của cực và zero
Trong mục này chúng ta khảo sát ảnh hƣởng của việc thêm cực và zero vào hệ thống
bằng cách dựa vào quỹ đạo nghiệm số. Ta thấy:
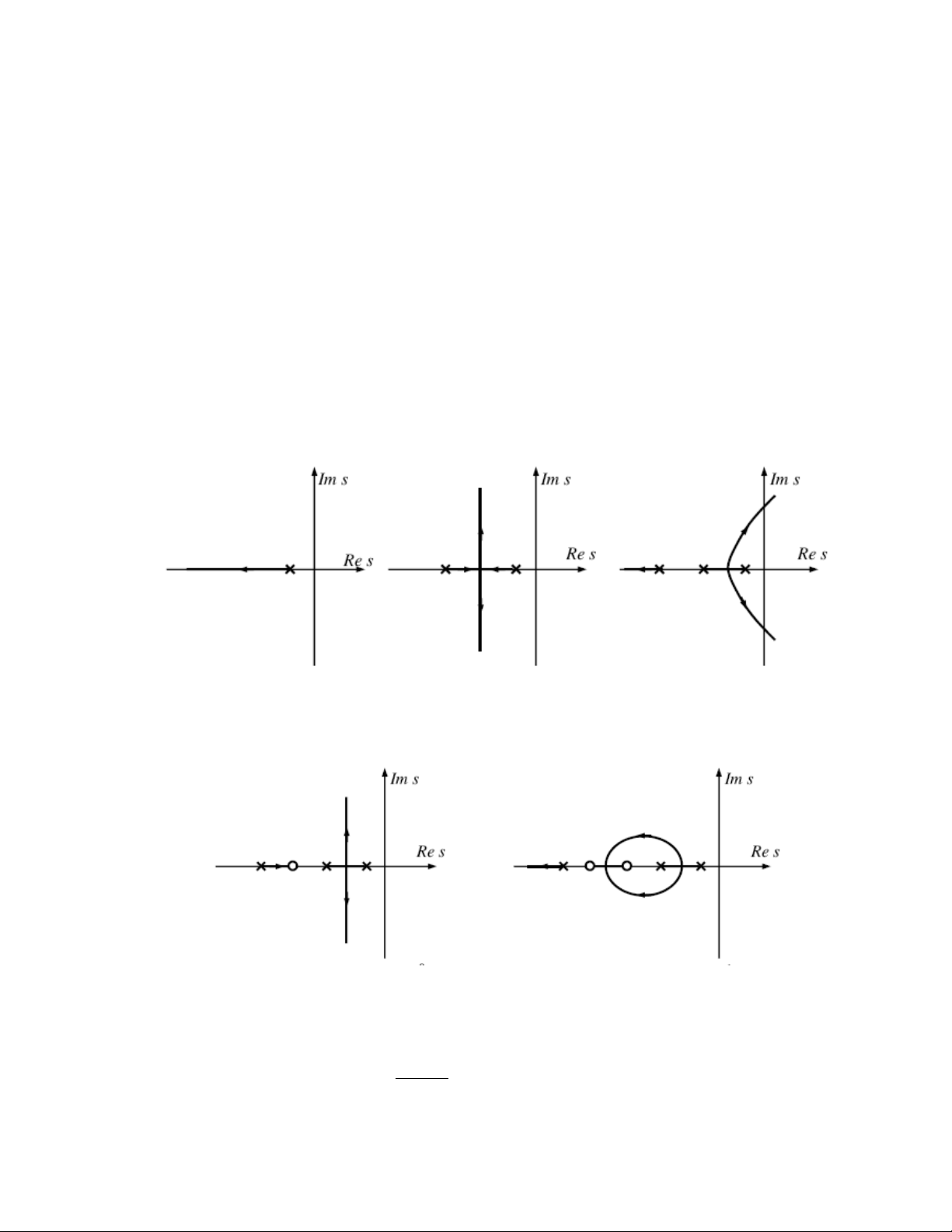
• Khi thêm 1 cực có phần thực âm vào hàm truyền hệ hở thì QĐNS của hệ kín có xu
hƣớng tiến gần về phía trục ảo (xem hình 6.3), hệ thống sẽ kém ổn định hơn, độ dự trữ
biên và độ dự trữ pha giảm, độ vọt lố tăng.
Hình 6.3. Sự thay đổi dạng QĐNS khi thêm cực vào hệ thống
• Khi thêm 1 zero có phần thực âm vào hàm truyền hệ hở thì QĐNS của hệ kín có xu
hƣớng tiến xa trục ảo (xem hình 6.4), do đó hệ thống sẽ ổn định hơn, độ dự trữ biên và độ
dự trữ pha tăng, độ vọt lố giảm.
Hình 6.4. Sự thay đổi dạng QĐNS khi thêm cực vào hệ thống
6.2.2. Ảnh hƣởng của hiệu chỉnh sớm trễ pha
6.2.2.1. Hiệu chỉnh sớm pha:
Hàm truyền:
)1(
1
1
)(
Ts
aTs
sGc
(6.1)
Chương 6: Thiết kế hệ thống điều khiển liên tục
106
Đặc tính tần số:
)1(
1
1
)(
Tj
aTj
jGc
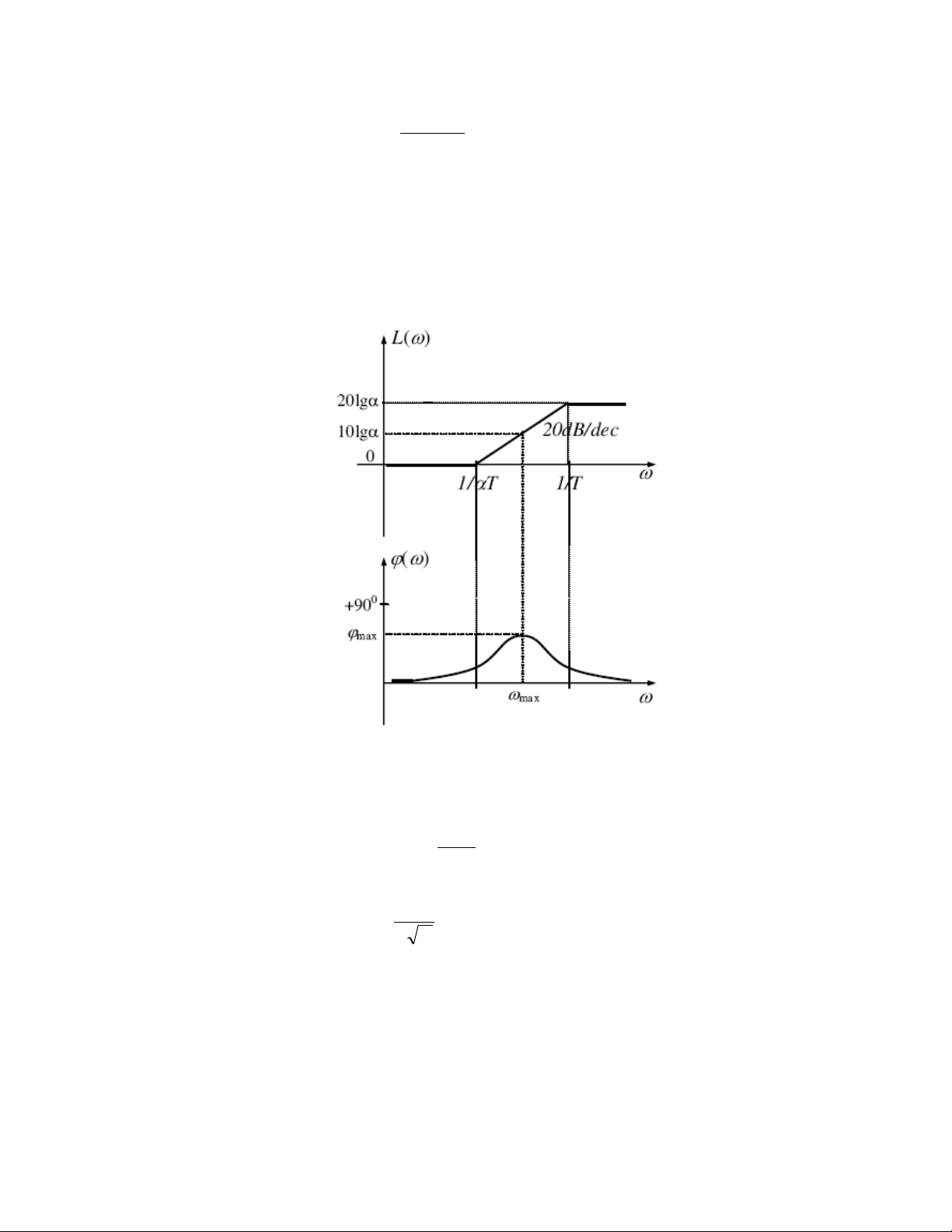
Hình 6.5 là biểu đồ Bode của khâu hiệu chỉnh sớm pha. Dựa vào biểu đồ Bode của
khâu sớm pha chúng ta thấy đặc tính pha luôn dƣơng (
,0
), do đó tín hiệu ra
luôn luôn sớm pha hơn tín hiệu vào. Khâu hiệu chỉnh sớm pha là một bộ lọc thông cao
(xem biểu đồ Bode biên độ), sử dụng khâu hiệu chỉnh sớm pha sẽ mở rộng đƣợc băng
thông của hệ thống, làm cho đáp ứng của hệ thống nhanh hơn, do đó khâu hiệu chỉnh sớm
pha cải thiện đáp ứng quá độ. Tuy nhiên cũng do tác dụng mở rộng băng thông mà khâu
hiệu chỉnh sớm pha làm cho hệ thống nhạy với nhiễu tần số cao.
Hình 6.5. Bieåu ñoà Bode cuûa khaâu hieäu chænh sôùm pha
Các thông số cần chú ý trên đặc tính tần số của khâu sớm pha:
• Độ lệch pha cực đại:
1
1
sin 1
max
(6.2)
• Tần số tại đó độ lệch pha cực đại:
T
1
max
(6.3)
• Biên độ tại pha cực đại:
lg10
max L
(6.4)
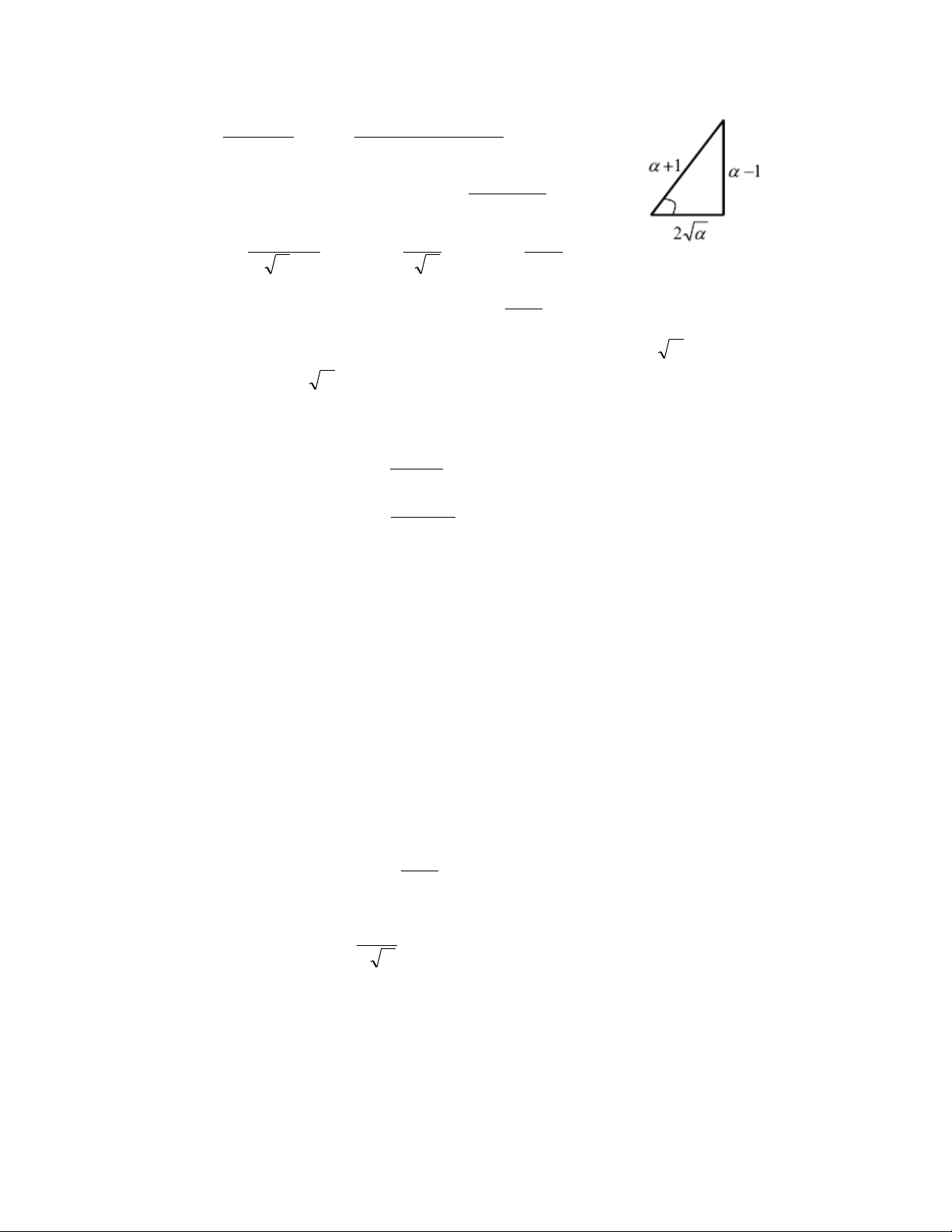
Chứng minh:
Chương 6: Thiết kế hệ thống điều khiển liên tục
107
1
1
arcsin
2
1
arctan
2
1
arctan
1
1
arctan11arg
1
11
arg
1
1
arg
22
22
22
T
T
T
T
jTT
T
jTTj
jT
Tj
Do đó:
1
1
arcsin
max
Dấu đẳng thức xảy ra khi:
TT /11 max
max
22
Thay
T/1
max
vào biểu thức biên độ của khâu sớm pha ta dễ dàng rút ra công
thức (6.4).
6.2.2.2. Hiệu chỉnh trễ pha:
Hàm truyền:
)1(
1
1
)(
Ts
aTs
sGc
(6.5)
Đặc tính tần số:
Tj
aTj
jGc
1
1
)(
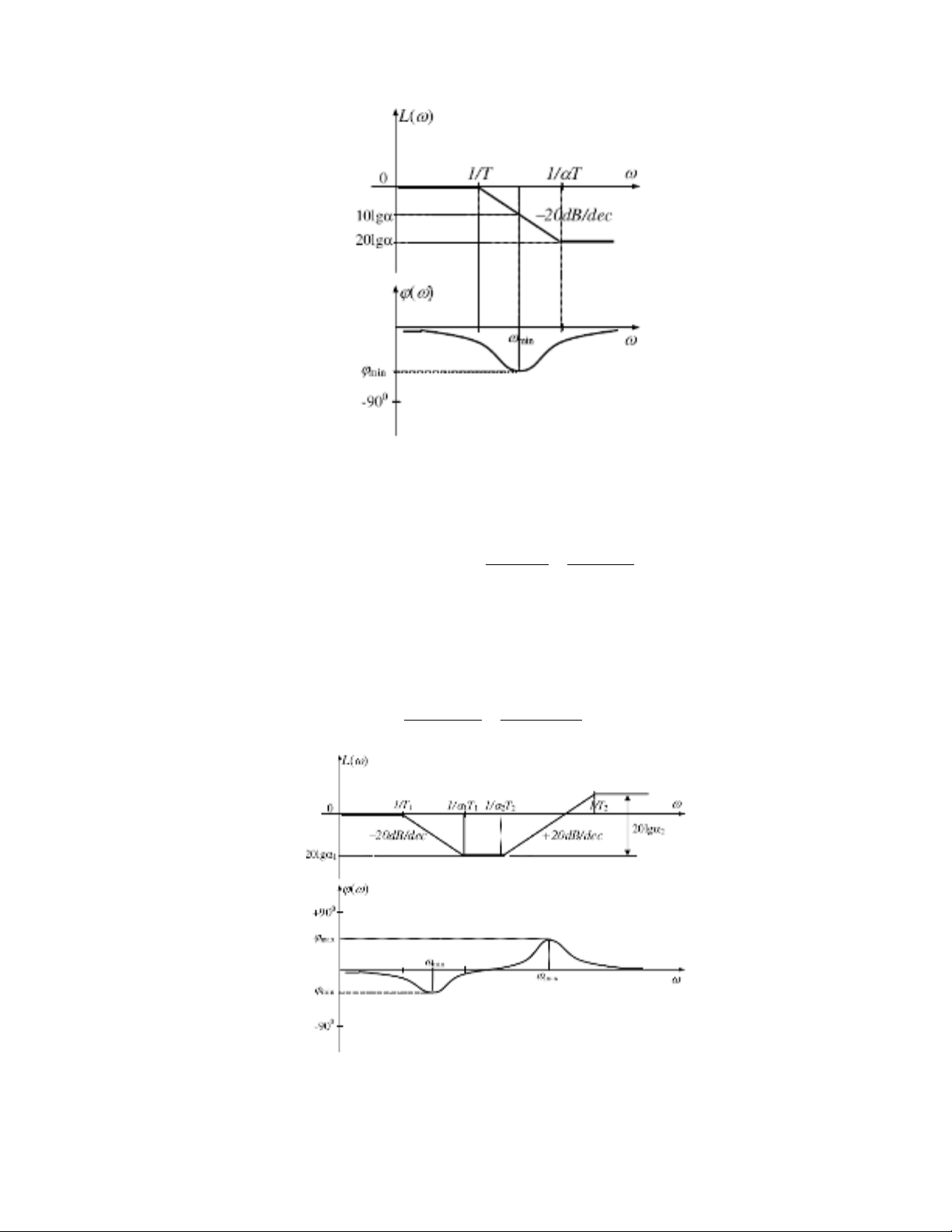
Hình 6.6 là biểu đồ Bode của khâu hiệu chỉnh trễ pha. Dựa vào biểu đồ Bode của
khâu trễ pha ta thấy đặc tính pha luôn âm (
,0)(
) nên tín hiệu ra luôn luôn trễ pha
hơn tín hiệu vào. Khâu hiệu chỉnh trễ pha là một bộ lọc thông thấp (xem biểu đồ Bode
biên độ), sử dụng khâu hiệu chỉnh trễ pha sẽ thu hẹp băng thông của hệ thống, làm cho hệ
số khuếch đại của hệ thống đối với tín hiệu vào tần số cao giảm đi, do đó khâu hiệu chỉnh
trễ pha không có tác dụng cải thiện đáp ứng quá độ. Tuy nhiên cũng do tác dụng làm giảm
hệ số khuếch đại ở miền tần số cao mà khâu trễ pha có tác dụng lọc nhiễu tần số cao ảnh
hƣởng đến hệ thống. Do hệ số khuếch đại ở miền tần số thấp lớn nên khâu hiệu chỉnh trễ
pha làm giảm sai số xác lập của hệ thống (xem biểu thức sai số xác lập đã trình bày ở
chƣơng 5).
Các thông số cần chú ý trên đặc tính tần số của khâu trễ pha:
• Độ lệch pha cực tiểu:
1
1
sin 1
min
(6.6)
• Tần số tại đó độ lệch pha cực tiểu:
T
1
min
(6.7)
• Biên độ tại pha cực tiểu:
lg10
min L
(6.8)
Chứng minh: Tƣơng tự nhƣ đã làm đối với khâu sớm pha.
Chương 6: Thiết kế hệ thống điều khiển liên tục
108
Hình 6.6. Biểu đồ Bode của khâu hiệu chỉnh trễ pha
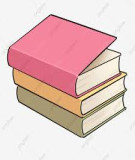
6.2.2.3 Hiệu chỉnh sớm trễ pha:
Khâu hiệu chỉnh sớm trễ pha gồm một khâu trễ pha mắc nối tiếp với một khâu sớm
pha. Hàm truyền của khâu hiệu chỉnh sớm trễ có thể viết dƣới dạng:
sT
sT
sT
sT
sGsGsG CCC
2
22
1
11
21 1
1
1
1
)().()(
(6.9)
Để biểu thức (6.9) là hàm truyền của khâu sớm trễ pha thì các thông số phải thỏa
điều kiện:
221121 /1/1,1,1 TT
.
Đặc tính tần số của khâu sớm trễ pha:
jT
jT
jT
jT
jGc
2
22
1
11
1
1
1
1
(6.10)
Hình 6.7. Biểu đồ Bode của khâu hiệu chỉnh sớm trễ pha




![Giáo trình Điều khiển thủy lực, khí nén - Trường ĐH Kỹ thuật Công nghiệp Thái Nguyên [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260224/diegomaradona04/135x160/83961772004808.jpg)
![Tài liệu giảng dạy Lý thuyết điều khiển tự động - Trường Đại học Quy Nhơn [Tài liệu đầy đủ]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240930/gaupanda055/135x160/7741727689830.jpg)
![Giáo trình Lắp đặt Hệ thống Thiết bị Điều khiển Tự động - Trường CĐ nghề Số 20 [Mới Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240830/xuanphongdacy04/135x160/79237101.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)