
12-1
Phương pháp Ziegler-Nichols
Đặcđiểmcủaphương pháp
•Làphương pháp thựcnghiệmđể xác định các tham sốcủabộđkPID
•Rấtthuậntiện khi mô hình toán họccủađốitượng chưabiếttrước
•Đáp ứng nhậnđượccóđộ quá điềuchỉnh khoảng 25%
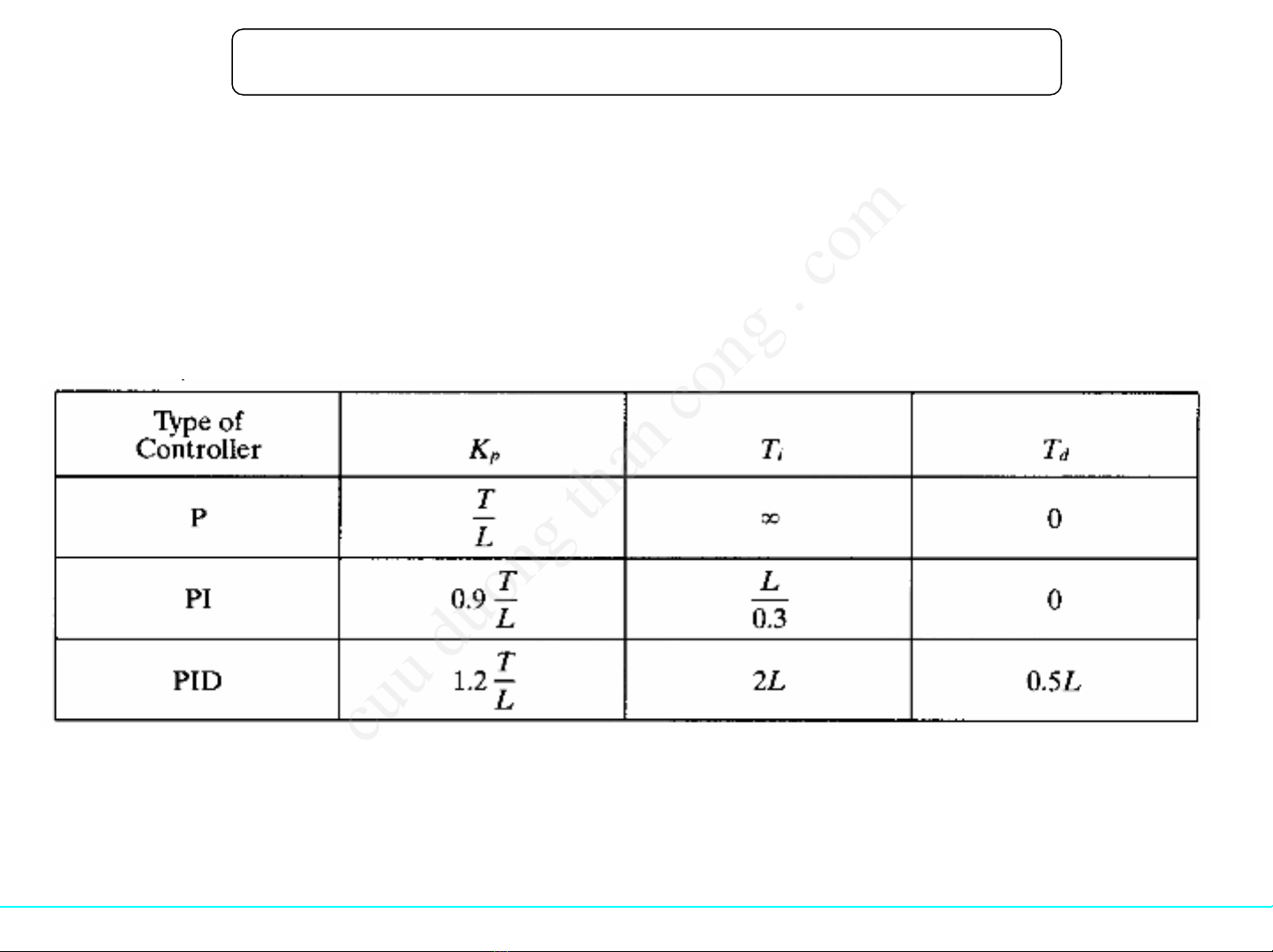
Phương pháp Ziegler-Nichols 1
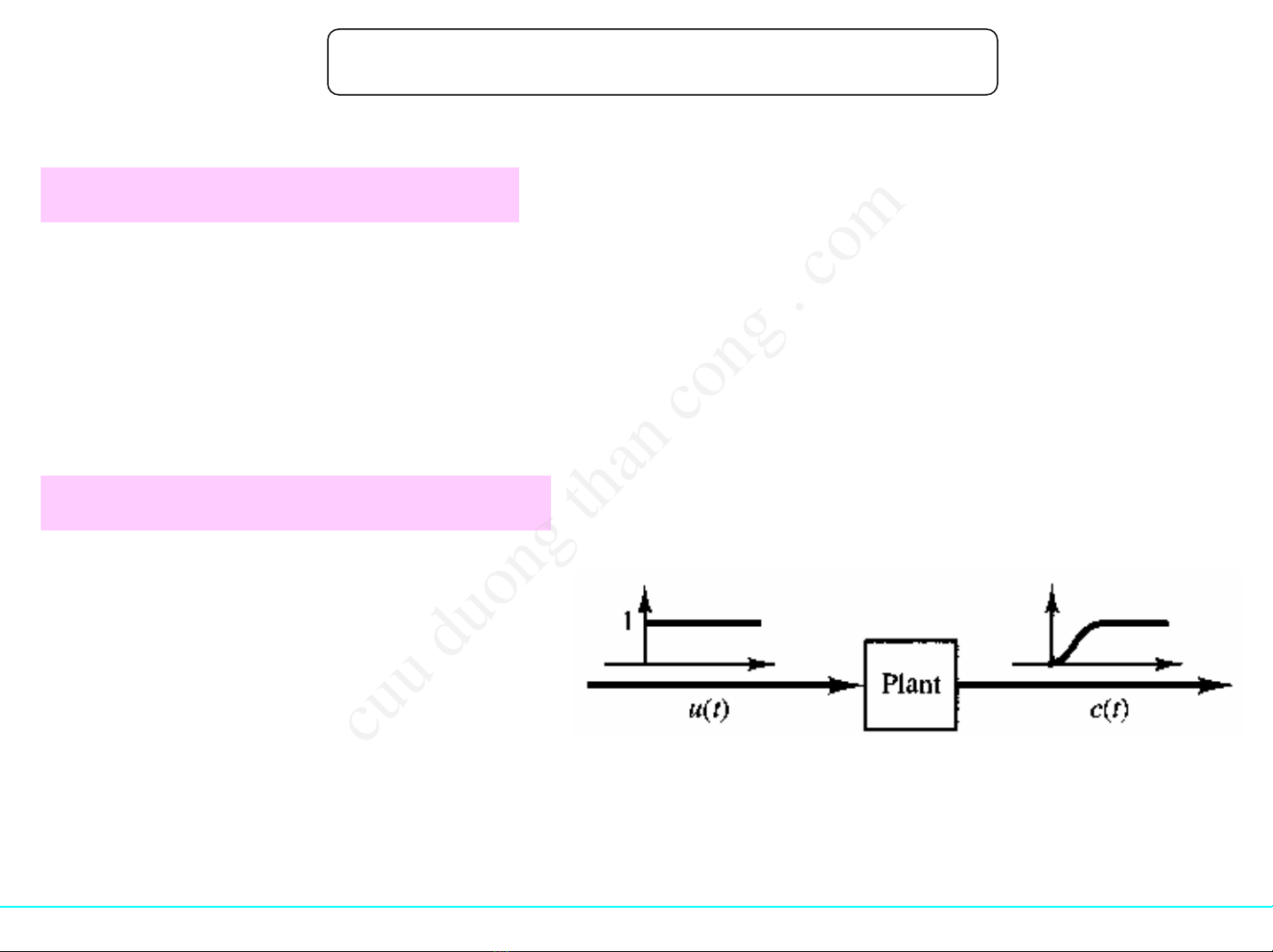
•Xác định bằng thựcnghiệm
đáp ứng bướcnhảycủađối
tượng
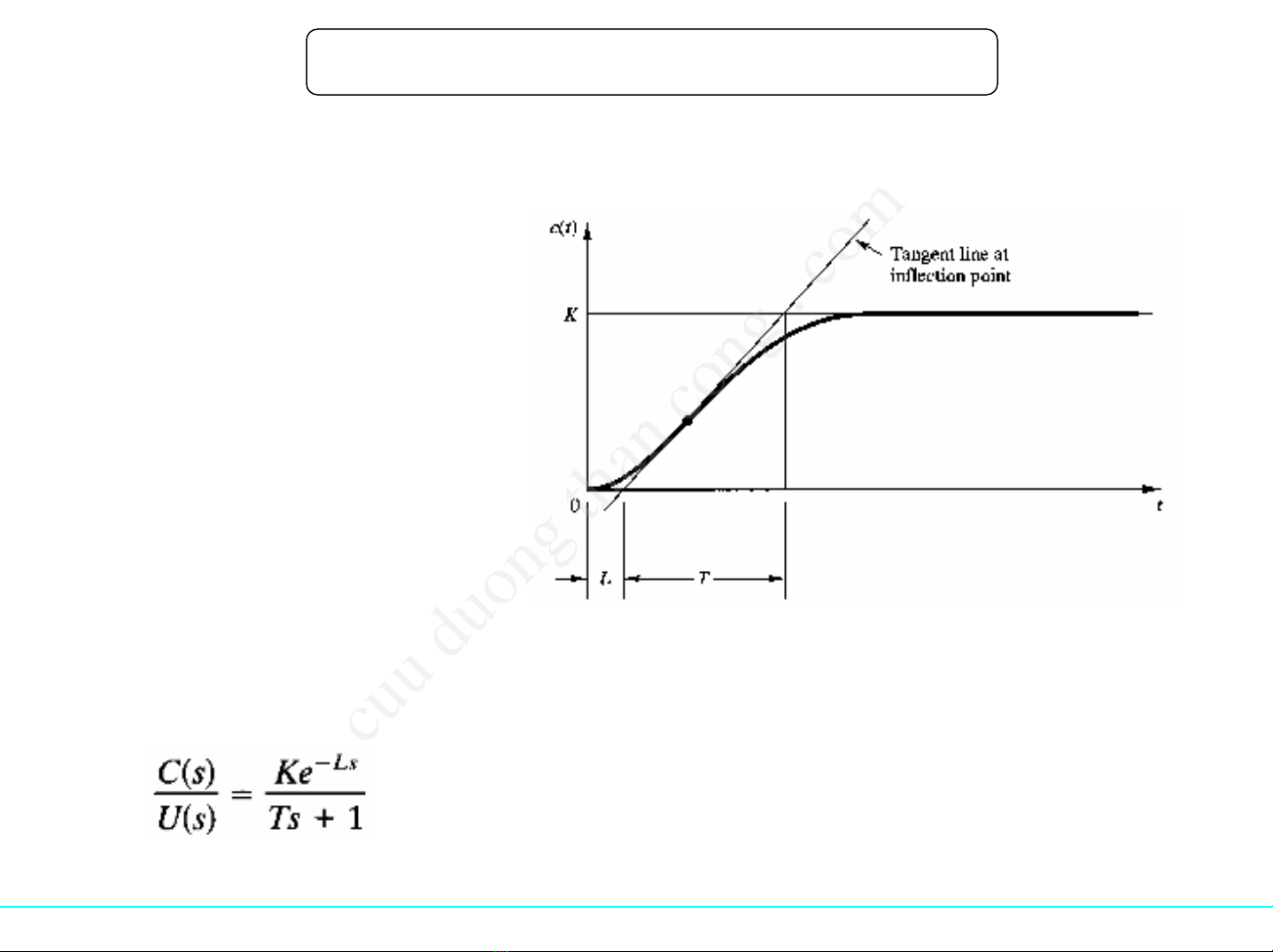
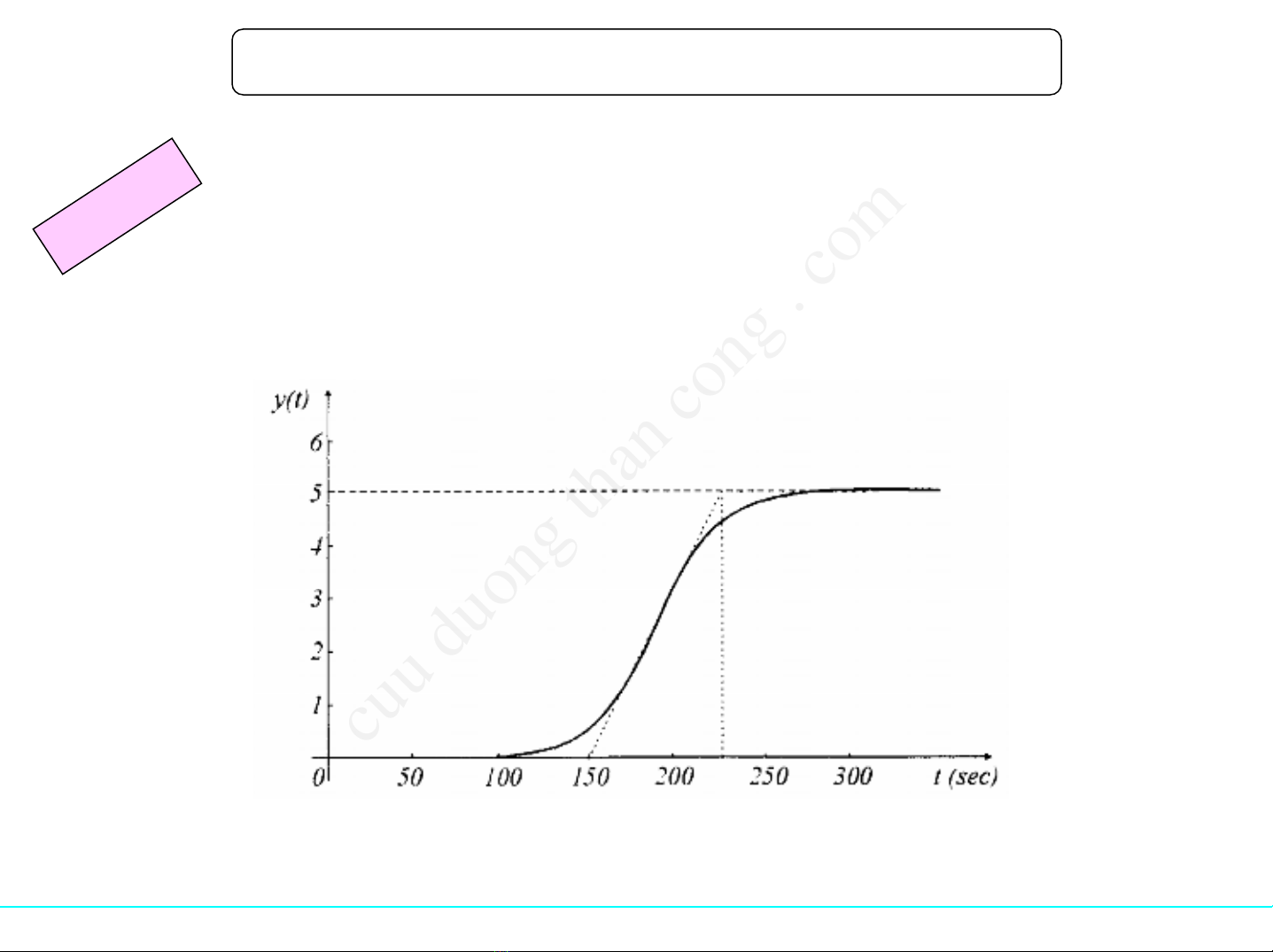
•Nếuđáp ứng có dạng hình chữ
S thì áp dụng đượcphương
pháp này
Lý thuyết ĐKTĐ 1 Bộmôn ĐKTĐ-Khoa Điện
cuu duong than cong . com




![Bài giảng Thiết kế điều khiển 2 [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250516/phongtrongkim0906/135x160/5221747448741.jpg)


![Bài giảng Lý thuyết điều khiển TS. Nguyễn Thu Hà [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250515/hoatrongguong02/135x160/241747304992.jpg)

















