1
Chương 5
ĐiỀU KHIỂN VECTOR
ĐỘNG CƠ KHÔNG ĐỒNG BỘ
2
Vector không gian – Hệ tọa độ abc và
Trục pha A
Trục pha C
Trục pha B
A
A’
B
B’
C
C’
Hệ trục tọa độ abc và hệ trục tọa độ
3
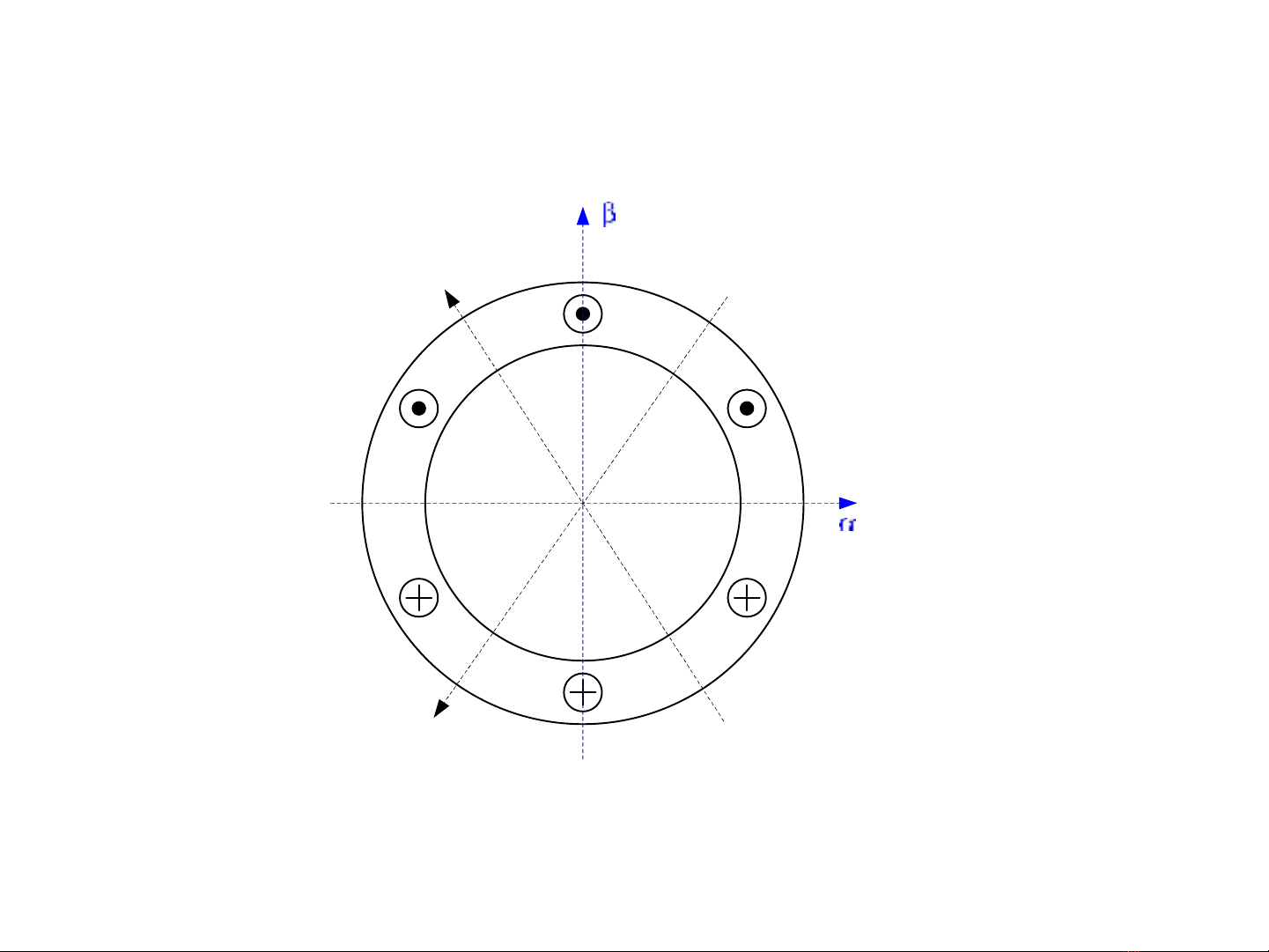
Vector không gian – Hệ tọa độ abc và
0 50 100 150 200 250 300 350
Sức từ động 3 pha
4
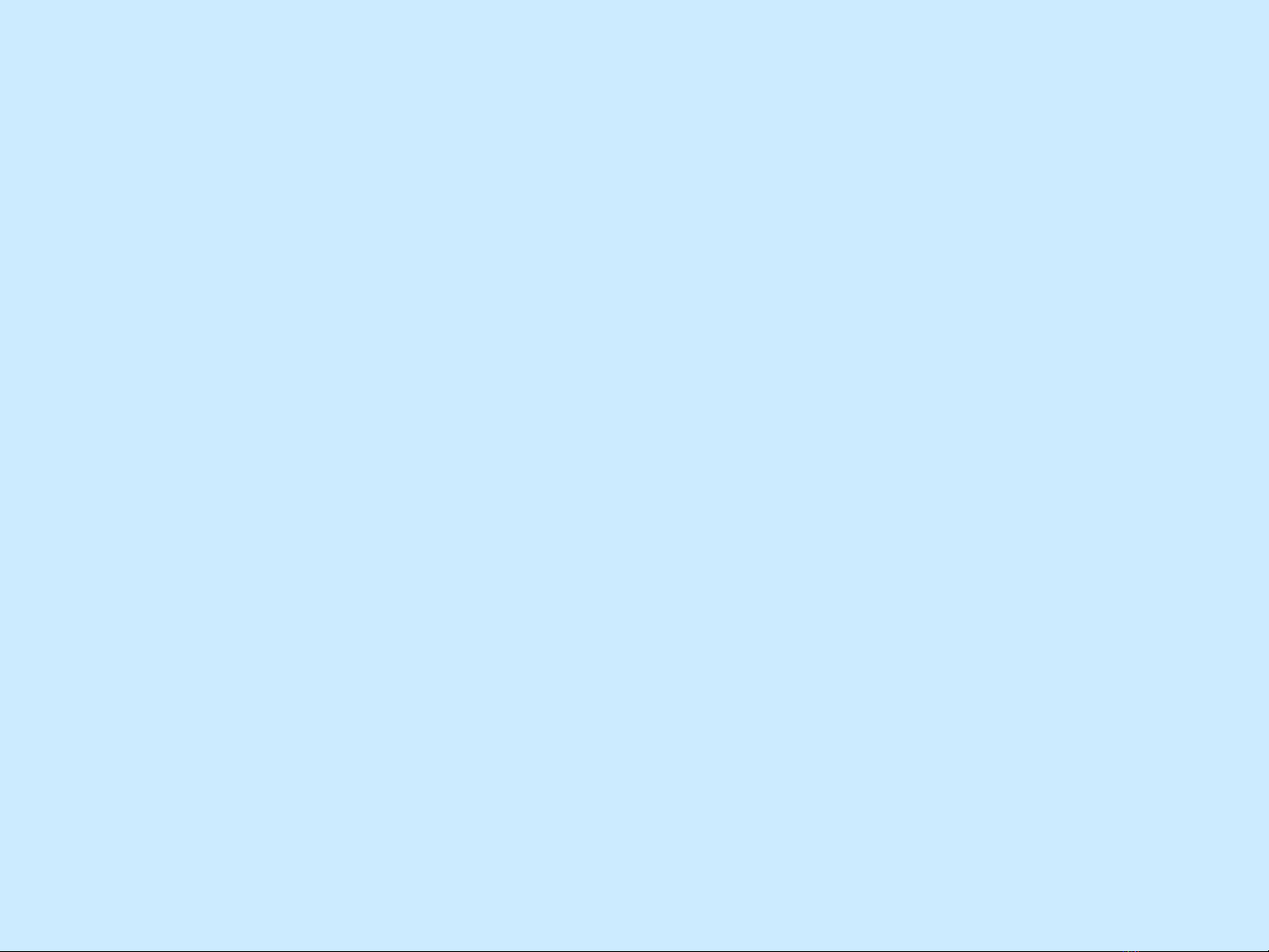
Vector không gian – Hệ tọa độ abc và
Trục pha A
Trục pha C
Trục pha B
Fas
Fbs
Fcs
Trục pha A
Trục pha C
Trục pha B
Fas
Fbs
Fcs
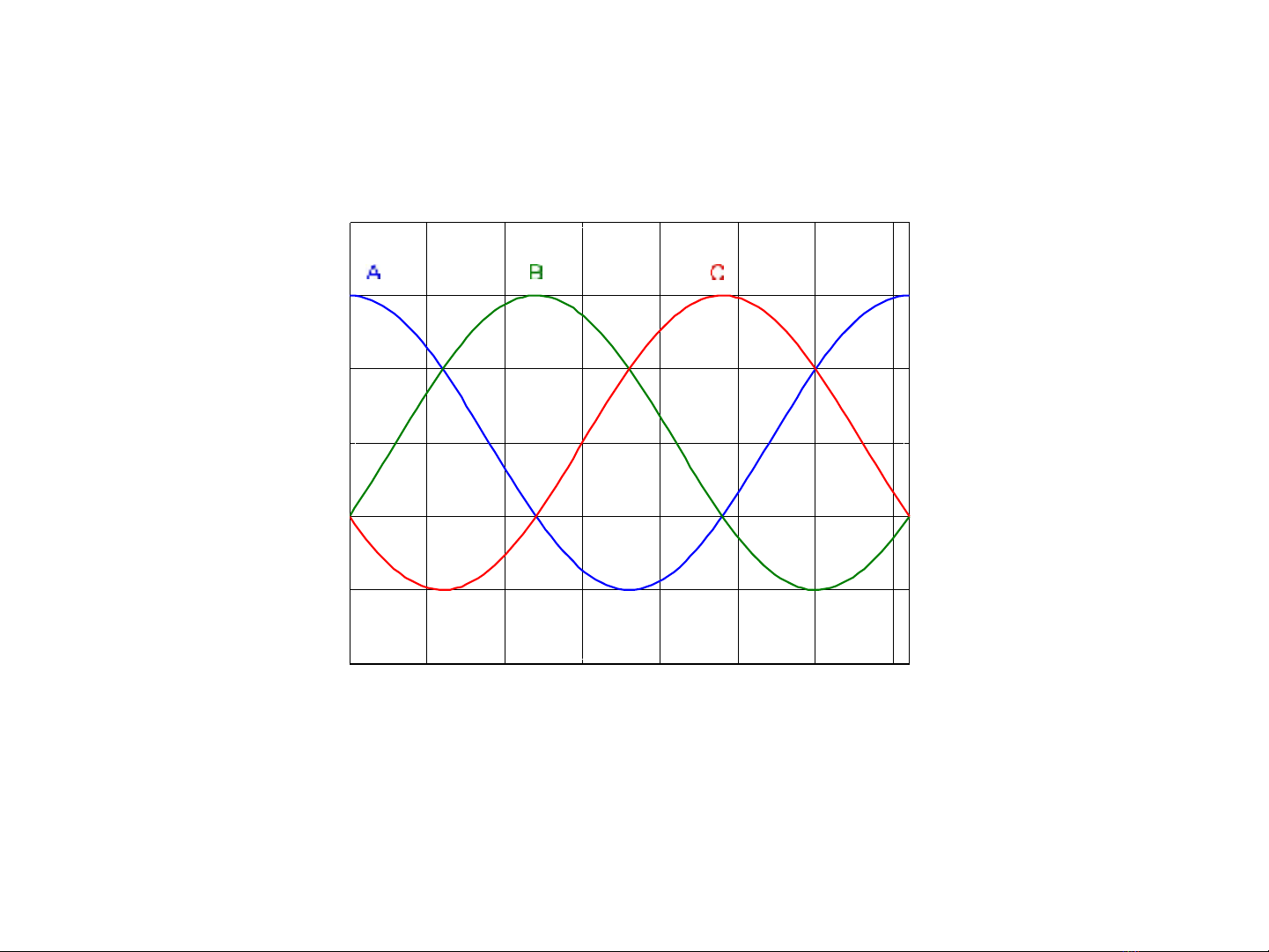
Các vector sức từ động trong trường hợp:
0
o
t
Các vector sức từ động trong trường hợp:
60
o
t
5
Vector không gian – Hệ tọa độ abc và
S
S
F
S
s
F
S
s
F
s
t
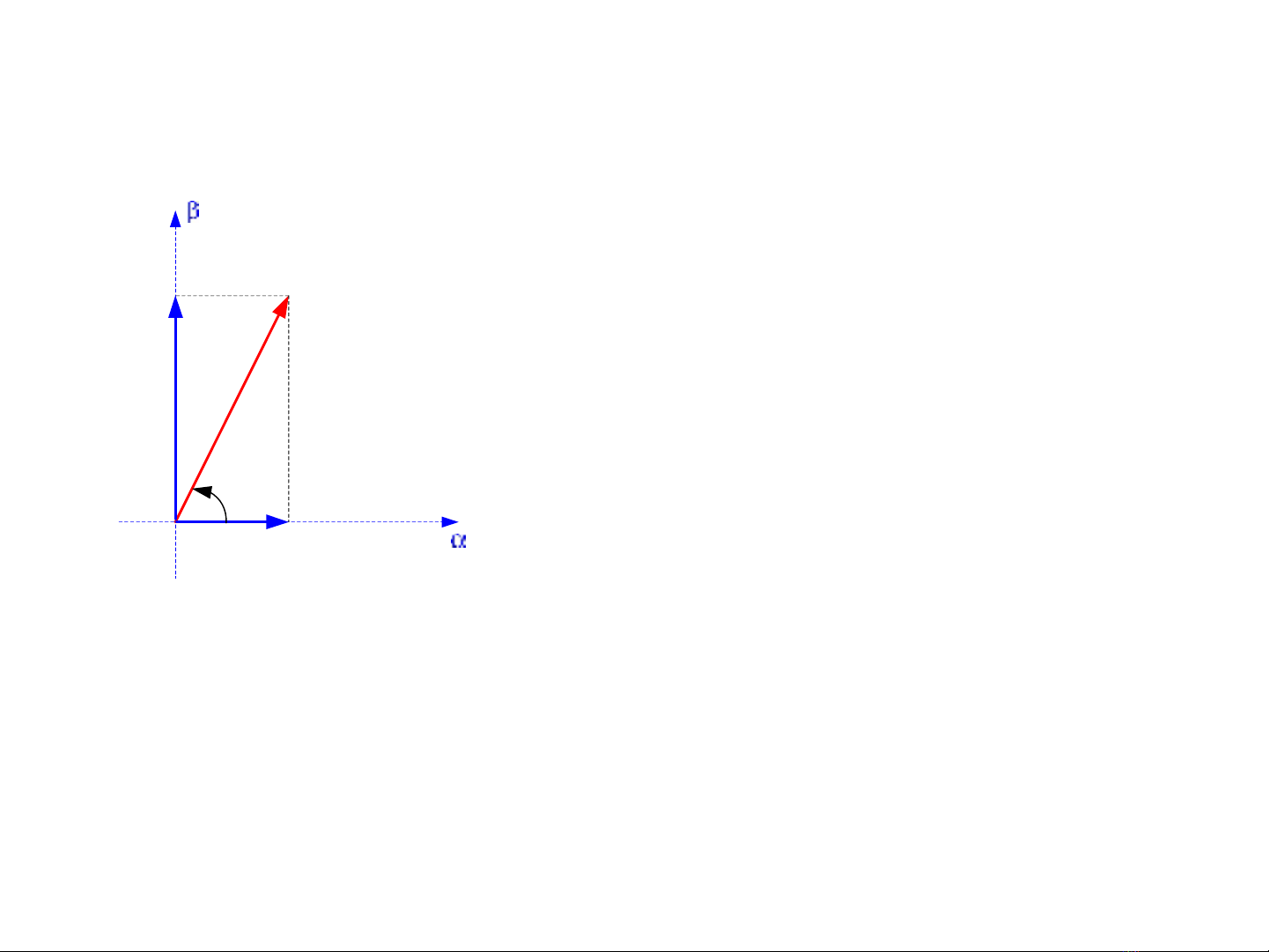
Vector sức từ động tổng
Vector sức từ động tổng
s
s
F
được định nghĩa là:
0 120 240
o o o
j j j
as bs cs
F e F e F e
s
s
F







![Đề thi Kỹ thuật lập trình PLC: Tổng hợp [Năm]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260121/lionelmessi01/135x160/85491768986870.jpg)

![Đề thi cuối học kì 1 môn Máy và hệ thống điều khiển số năm 2025-2026 [Kèm đáp án chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251117/dangnhuy09/135x160/4401768640586.jpg)




![Tự Động Hóa Thủy Khí: Nguyên Lý và Ứng Dụng [Chi Tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250702/kexauxi10/135x160/27411767988161.jpg)






