Giáo trình thí nghiệm CAD
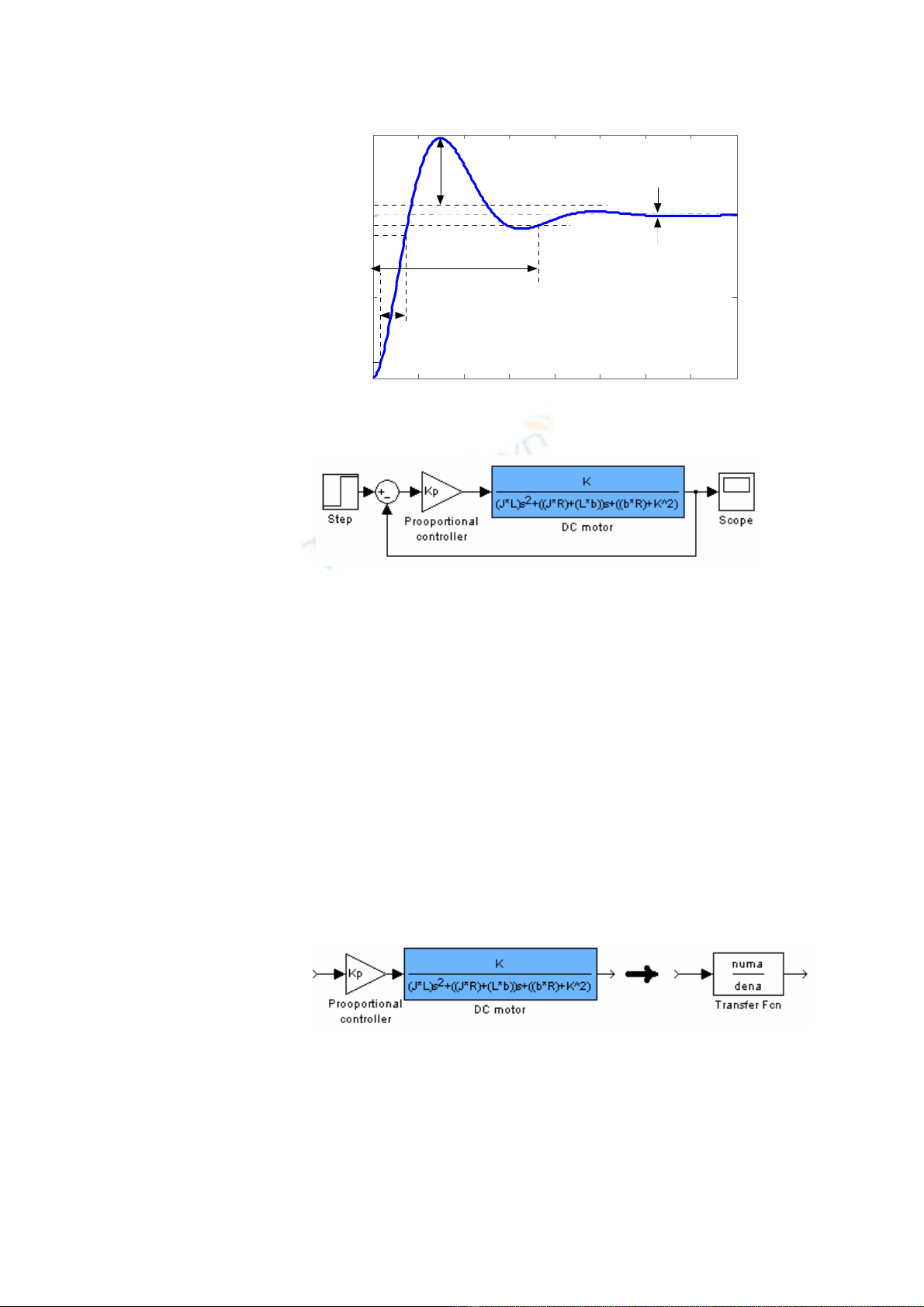
Step Response
Time (sec)
00.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4
0
0.5
1
1.5
S-S error
0.95
1.05
0.90
0.1
Overshoot
rise time
settling time
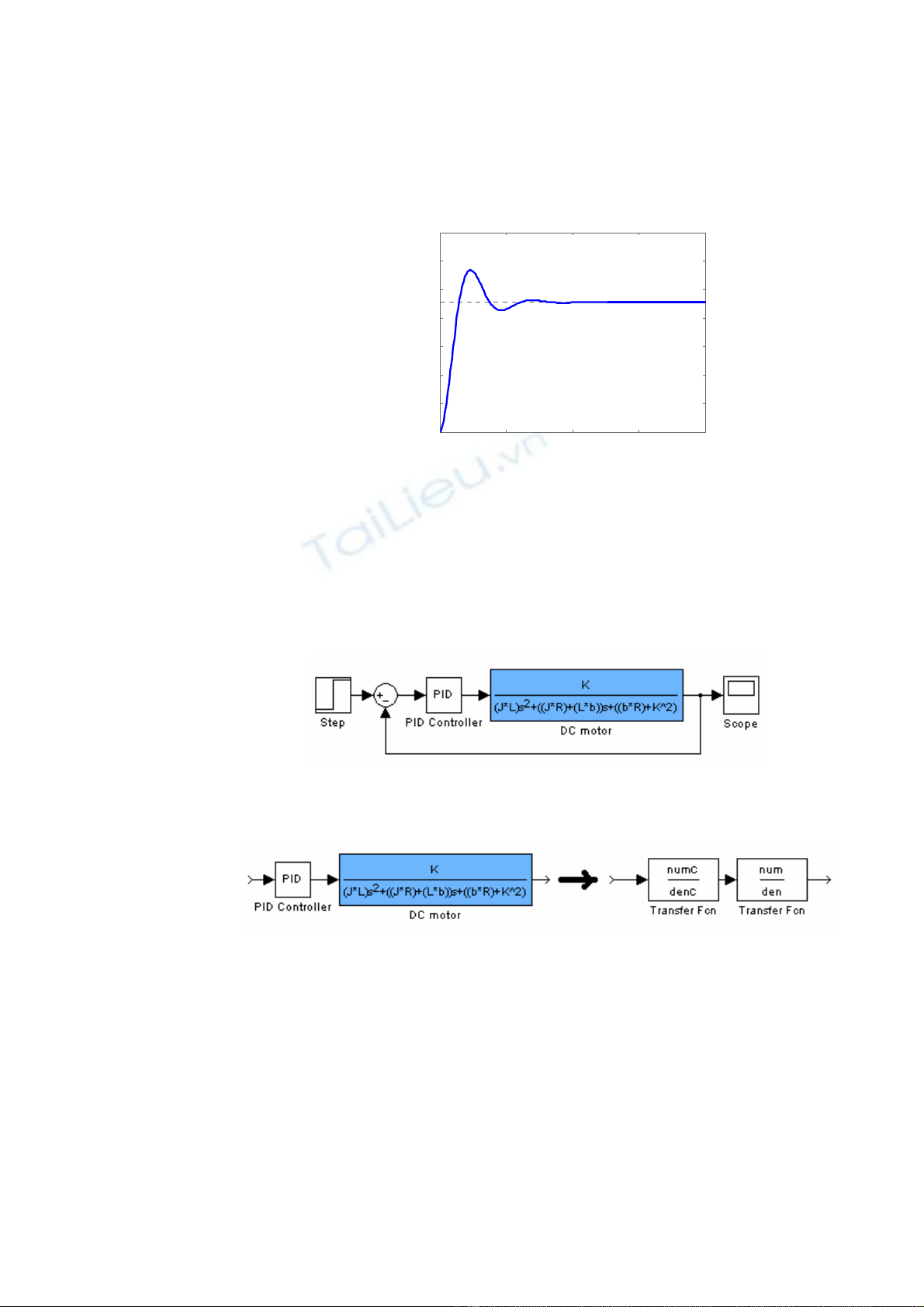
c B ộ điều khiển tỉ lệ P:
Hình 5.5 – Bộ điều khiển tỉ lệ P
9 Thực hiện trong Matlab: Ta có hàm truyền của motor DC như III.1.c:
>>J=0.01;
>>b=0.1;
>>K=0.01;
>>R=1;
>>L=0.5;
>>num=K;
>>den=[(J*L) ((J*R)+(L*b)) ((b*R)+K^2)];
Khi thêm vào khâu tỉ lệ P, ta có hàm truyền vòng hở:
>>Kp=100;
>>numa=Kp*num;
>>dena=den;
Xác định hàm truyền vòng kín của hệ thống ta dùng lệnh cloop:
>>[numac,denac]=cloop(numa,dena)
©
TcAD - 2003 43
Giáo trình thí nghiệm CAD
Đáp ứng Step vòng kín của bộ điều khiển tỉ lệ như sau:
>>t=0:0.01:2;
>>step(numac,denac)
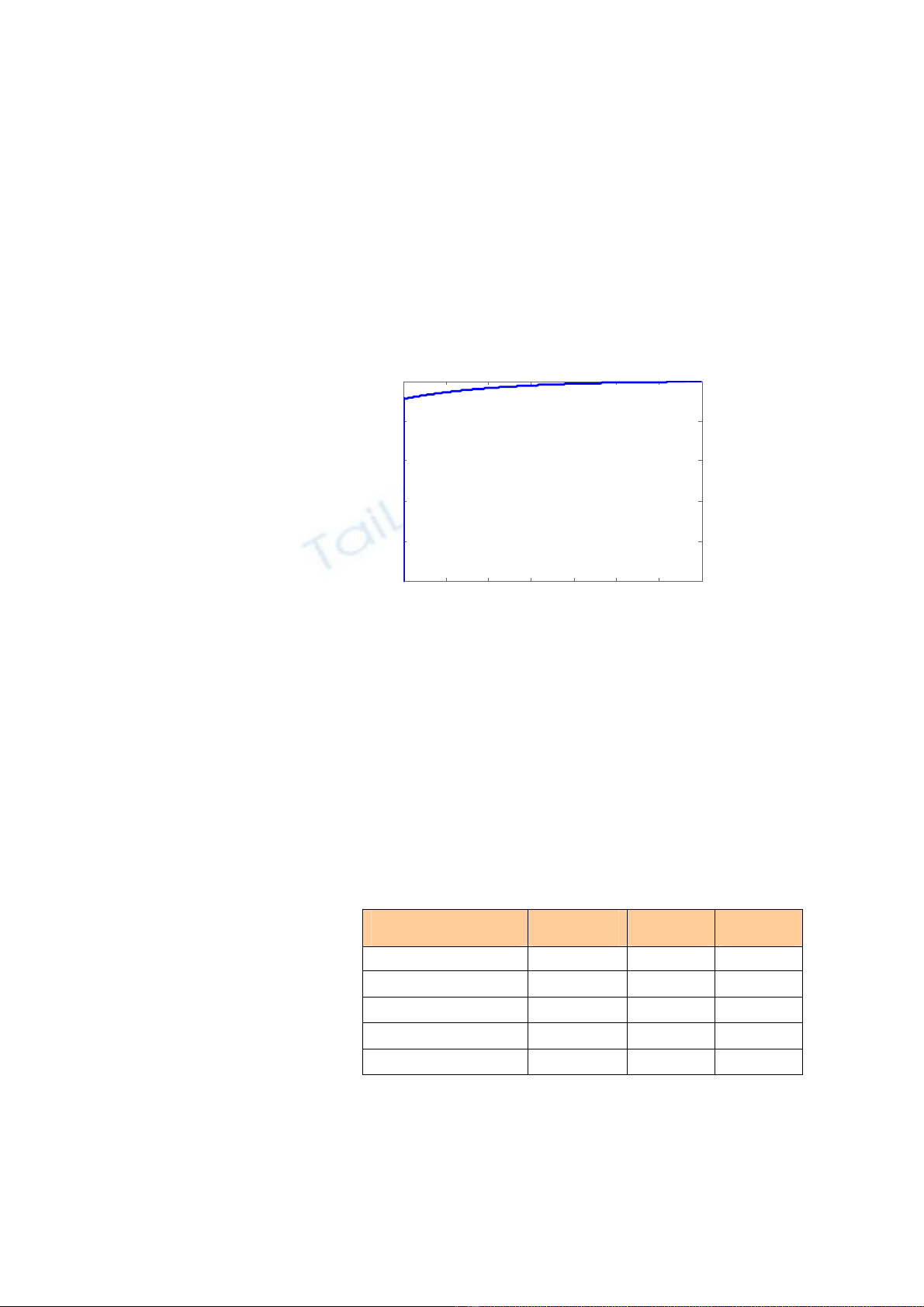
Step Response
Time (sec)
Amplitude
00.5 11.5 2
0
0.2
0.4
0.6
0.8
1
1.2
1.4
9 Sinh viên hãy so sánh với đáp ứng của hệ khi chưa có bộ điều khiển tỉ
lệ, ở câu III.1.c (lưu ý đến các thông số: thời gian lên, độ vọt lố, thời
gian quá độ).
9 Tương tự, sinh viên hãy so sánh với đáp ứng xung.
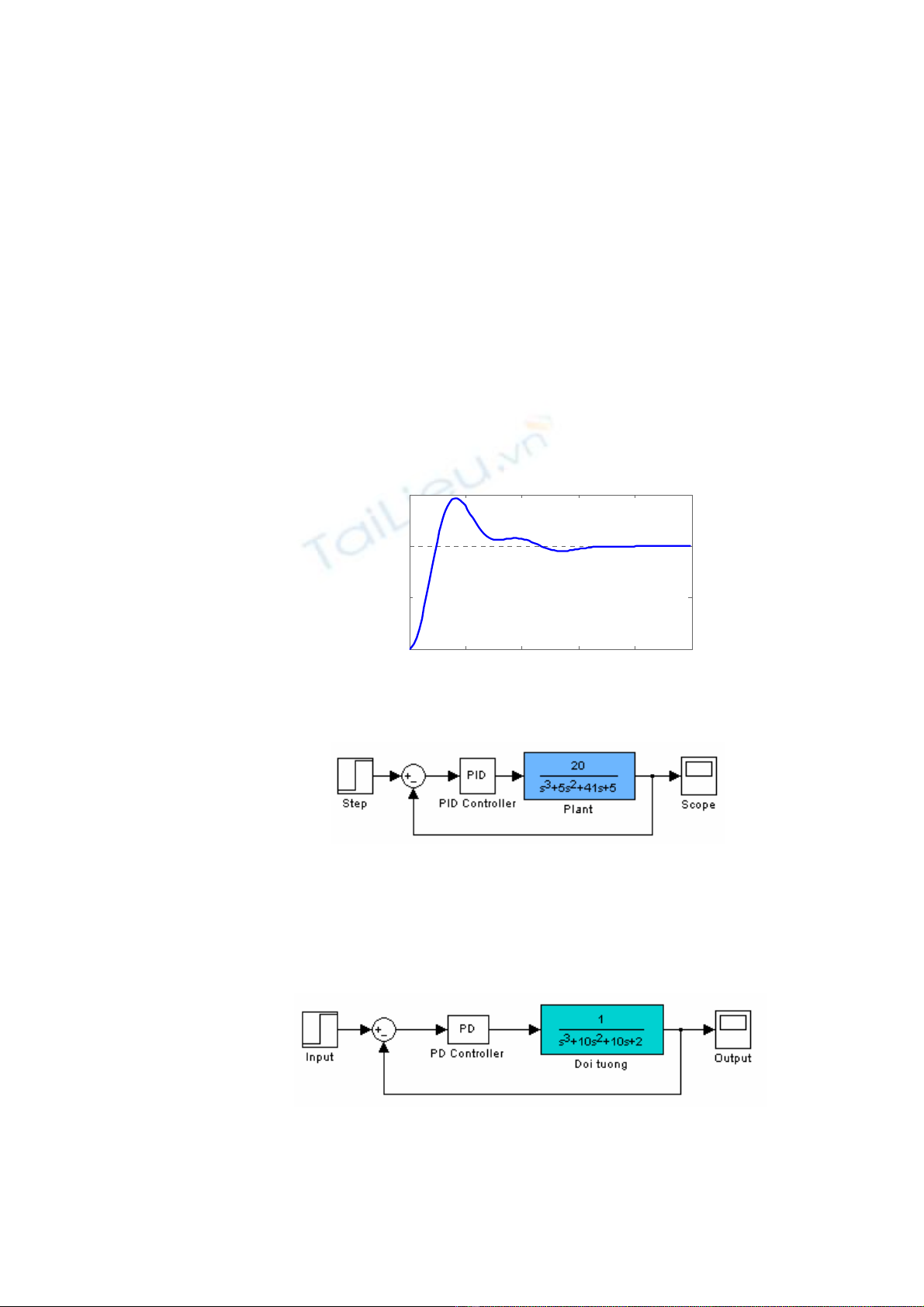
d B ộ điều khiển Vi tích phân tỉ lệ PID:
Hình 5.6 – Bộ điều khiển PID
Khi thêm bộ điều khiển PID, hàm truyền hở của hệ thống là:
>>Kp=100;
>>Ki=1;
>>Kd=1;
>>numc=[Kd, Kp, Ki];
>>denc=[1 0];
>>numa=conv(num,numc); % tích chập tử số
>>dena=conv(den,denc); % tích chập mẫu số
Hàm truyền vòng kín hồi tiếp âm đơn vị:
©
TcAD - 2003 44
Giáo trình thí nghiệm CAD
>>[numac,denac]=cloop(numa,dena);
Đáp ứng Step của hệ điều khiển PID:
>>step(numac,denac)
9 Sinh viên so sánh với đáp ứng của bộ điều khiển tỉ lệ P ở câu c, nhận
xét.
9 Dựa vào bảng tổng kết ảnh hưởng của KP, KD và KI đối với hệ thống
điều khiển, sinh viên hãy thay đổi 3 thông số này và kiểm chứng đáp
ứng của hệ thống.
Step Response
Time (sec)
Amplitude
050 100 150 200 250 300 350
0
0.2
0.4
0.6
0.8
1
III.3 Hiệu chỉnh thông số của bộ điều khiển PID
Một phương pháp cổ điển nhưng đơn giản và hiệu quả để chỉnh định 3
thông số KP, KI và KD của bộ điều khiển PID là phương pháp Ziegler-
Nichols (Ziegler Nichols Tuning Method). Thủ tục chỉnh định như sau:
1. Chỉ điều khiển hệ thống bằng bộ điều khiển tỉ lệ KP (đặt KI=KD=0).
2. Tăng KP đến giá trị KC mà ở đó hệ thống bắt đầu bất ổn (bắt đầu xuất
hiện sự giao động - điểm cực của hàm truyền kín nằm trên trục ảo jϖ).
Xác định tần số ϖc của giao động vừa đạt.
Từ 2 giá trị KC và ϖc vừa đạt, các thông số số KP, KI và KD được xác
định như bảng sau:
Bộ điều khiển KPKIKD
P (tỉ lệ) 0.5 KC
PI (tích phân tỉ lệ) 0.45 KC0.191KPϖc
PID (vi tích phân tỉ lệ) 0.6 KC0.318KPϖc0.785KP/ϖc
PID với một ít vọt lố 0.33 KC0.318KPϖc2.07KP/ϖc
PID không vọt lố 0.2 KC0.53KPϖc3.14KP/ϖc
3. Tinh chỉnh lại 3 thông số này để đạt được đáp ứng như mong muốn.
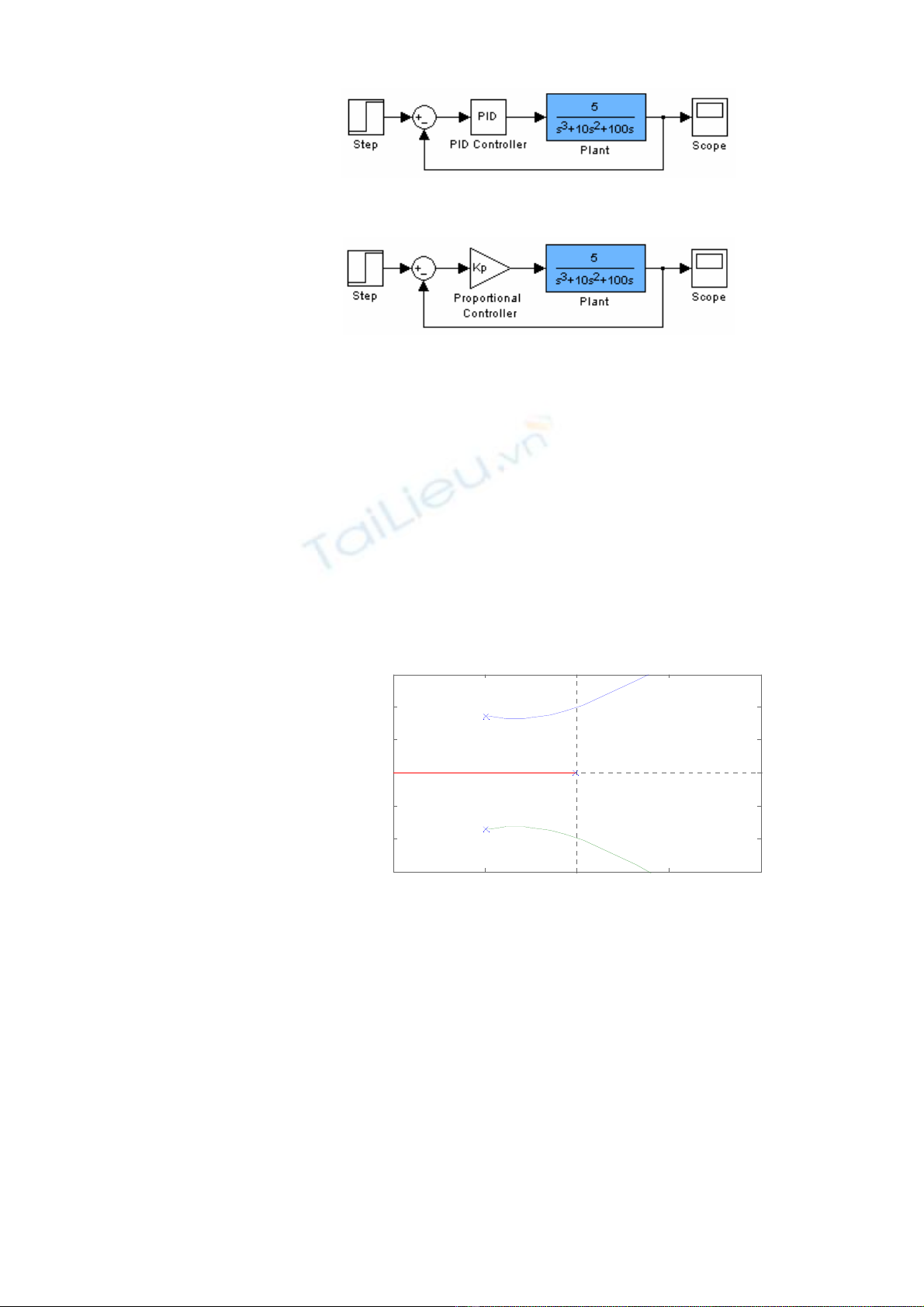
c Ví dụ: Giả sử cần thiết kế bộ điều khiển PID cho hệ thống sau:
©
TcAD - 2003 45
Giáo trình thí nghiệm CAD
9 Bước 1: Điều khiển hệ thống chỉ với bộ điều khiển tỉ lệ:
9 Bước 2: Xác định KC và ϖc mà ở đó hệ thống bắt đầu giao động -
dùng hàm rlocus của Matlab (sinh viên nên lưu thành file .m hoặc thao
tác trong Matlab Editor sau đó copy và dán vào Workspace cả đoạn lệnh
để dễ dàng cho việc hiệu chỉnh các thông số ở phần sau):
>>close all
>>num=5;
>>den=[1 10 100 0];
>>[numc,denc]=cloop(num,den);
>>htkin=tf(numc,denc) % ham truyen vong kin
>>rlocus(htkin); %ve qui dao nghiem
>> axis([-10 10 -15 15])
Root Locus
Real Axis
Imag Axis
-10 -5 0 5 10
-15
-10
-5
0
5
10
15
Xác định Kc và ϖc bằng hàm rlocfind:
>>[Kc,Omegac] = rlocfind(htkin)
Nhấp chuột vào điểm giao nhau giữa quĩ đạo nghiệm và trục ảo của đồ
thị, trong WorkSpace ta được:
Kc =
199.5793
Omegac =
-10.0145
0.0072 +10.0072i
0.0072 - 10.0072i
©
TcAD - 2003 46
Giáo trình thí nghiệm CAD
Như vậy ta được KC=200 và ϖc = 10. Suy ra thông số của bộ điều khiển
PID:
KP = 0.6KC = 120
KI = 0.318KPϖc = 381.6
KD = 0.785KP/ϖc = 9.4
Thử đáp ứng của hệ:
>>Kp=120; Ki=381.5; Kd=9.4;
>>numc=[Kd, Kp, Ki];
>>denc=[1 0]; % ham truyen cua PID
>>[numac,denac]=cloop(conv(num,numc),conv(den,denc))
>>step(numac,denac)
9 Bước 3: Thực hiện tương tự như III.2.d, sinh viên hãy điều chỉnh một
lượng nhỏ 3 thông số KP, KD và KI để được đáp ứng tốt hơn.
Step Response
Time (sec)
Amplitude
00.5 11.5 22.5
0
0.5
1
1.5
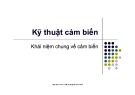
d Sinh viên hãy thiết kế bộ điều khiển PID cho hệ thống sau:
IV. Tự chọn
c Sinh viên hãy thiết kế bộ điều khiển Vi phân tỉ lệ (Proportional-
Derivative controller):
d Sinh viên hãy thiết kế bộ điều khiển Tích phân tỉ lệ (Proportional-
Integral controller):
©
TcAD - 2003 47

























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)