
CHƯƠNG III
XÂY DỰNG MÔ HÌNH ĐIỀU KHIỂN VÀ GIÁM SÁT DÂY CHUYỀN
PHÂN LOẠI SẢN PHẨM SỬ DỤNG PLC VÀ HMI CỦA PANASONIC
Trên cở sở lý thuyết về PLC, HMI, INVERTER và trang thiết bị hiện có của khoa
Điện – Điện Tử, để minh họa một cách cụ thể về vấn đề điều khiển và giám sát, việc
nghiên cứu đã xây dựng mô hình như sau:
I. GIỚI THIỆU TỔNG QUÁT VỀ MÔ HÌNH.
1. Yêu cầu của mô hình.
- Hình ảnh mô hình:
Hình 3.1: Hình ảnh mô hình.
- Kích thước thực tế của mô hình.
( Xem phần phụ lục).
- Mô hình có tên gọi là: “Băng chuyền phân loại sản phẩm”.
- Mô hình thể hiện một khâu trong dây chuyền sản xuất, là phân loại sản phẩm.
Cụ thể như sau:
Có hai cảm biến dùng để phát hiện sản phẩm.
Hai van từ (solenoid): Nếu chỉ có một cảm biến tác động thì van từ
số 1 tác động, nếu cả 2 cảm biến 1 và 2 tác động cùng lúc thì van từ 2 sẽ tác
động làm xilanh cylinder đẩy sản phẩm ra.
- Biến tần VF0 để thay đổi tốc độ động cơ.
- Một động cơ không đồng bộ ba pha, có nhiệm vụ kéo băng tải hoạt động.
- Một webcam theo dõi toàn bộ quá trình hoạt động của mô hình.
2. Sơ đồ khối và lưu đồ giải thuật.
2.1 Sơ đồ khối
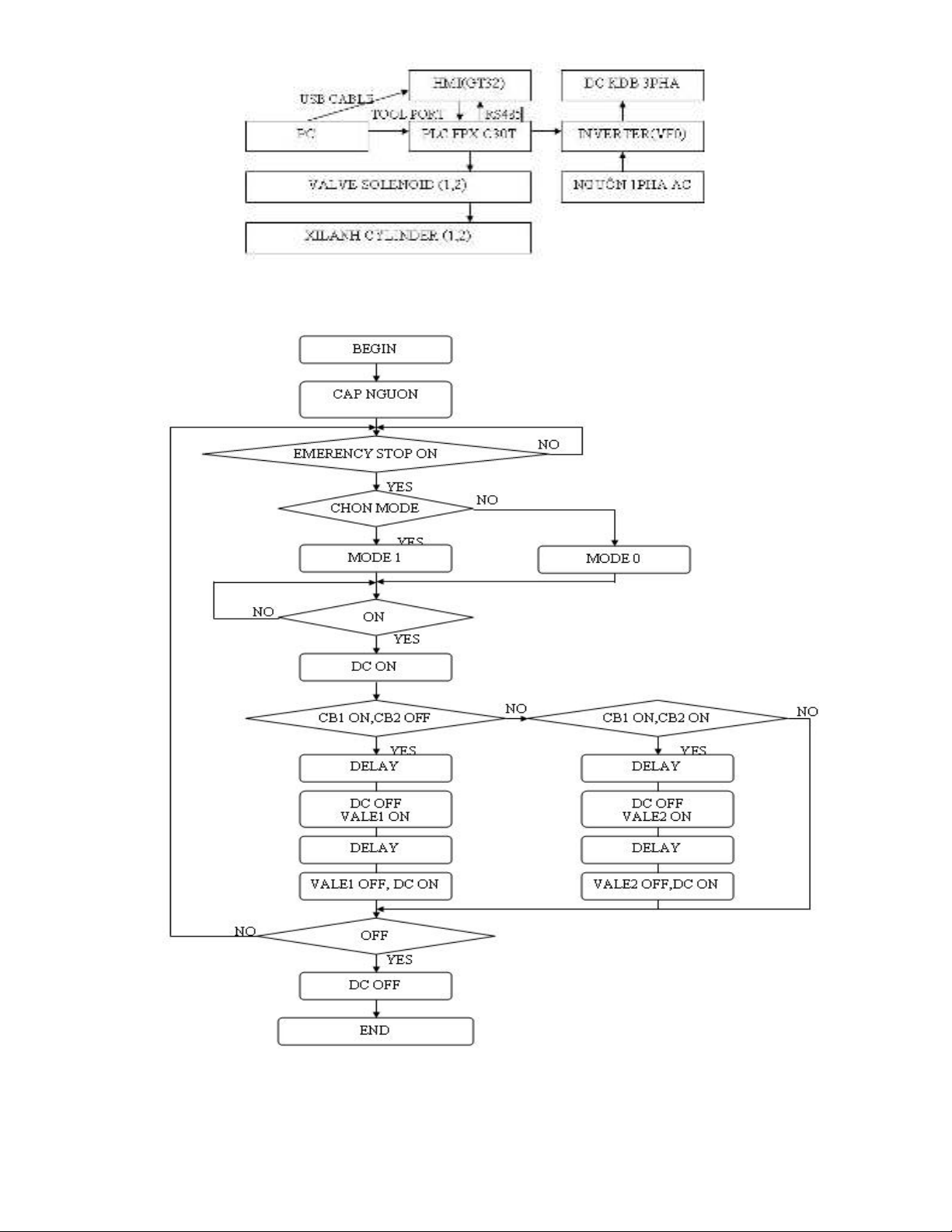
Hình 3.2: Sơ đồ khối
2.2 Lưu đồ giải thuật
Hình 3.3: Lưu đồ giải thuật
3. Nguyên tắc hoạt động của mô hình.
- Băng tải chạy khi nút nhấn “ON” trên màn hình cảm ứng GT được tác động
và dừng lại khi nhấn nút “OFF” trên màn hình cảm ứng GT.
- Khi có sự cố, nhấn “EMERGENCY STOP” hệ thống sẽ dừng hoạt động.
- Khi băng tải chạy sản phẩm sẽ được đưa vào một đầu của băng tải từ một
băng tải trước đó (do điều kiện hạn chế nên em không làm băng tải này).
- Băng tải sẽ đưa sản phẩm kiểm tra độ cao thấp nhờ cảm biến 1 (CB1) và
cảm biến 2 (CB2).
- Sản phẩm cao tại một thời điểm nào đó chắn cả hai CB1và CB2 làm hai
cảm biến này cùng tác động. Sản phẩm thấp chỉ là m một cảm biến CB1 tác
động.
- Nếu có vật chạy trên băng tải mà không có cảm biến nào tác động thì đó là
phế phẩm.
- Việc tác động đẩy sản phẩm nhờ hệ thống khí nén.
- Trong quá trình hoạt động thì sản phẩm sẽ được đếm và được hiển thị trên
màn hình cảm ứng GT.
- Quá trình được lặp đi, lặp lại và ngưng hoạt động khi nhấn “OFF”.
II.CÁC THIẾT BỊ SỬ DỤNG CHO MÔ HÌNH.
- Màn hình cảm ứng GT32.
- PLC loại C30T.
- Khối giao tiếp cassette COM 6, máy tính, động cơ xoay chiều ba pha, van
từ, cảm biến, công tắc, dây điện, dây chuyển cổng COM sang USB, đầu cốt
giắc cắm,...
- Webcam colorvis CVC ND8.
- Các phần mềm FPWin RG, GTWin.
- Hệ thống khí nén.
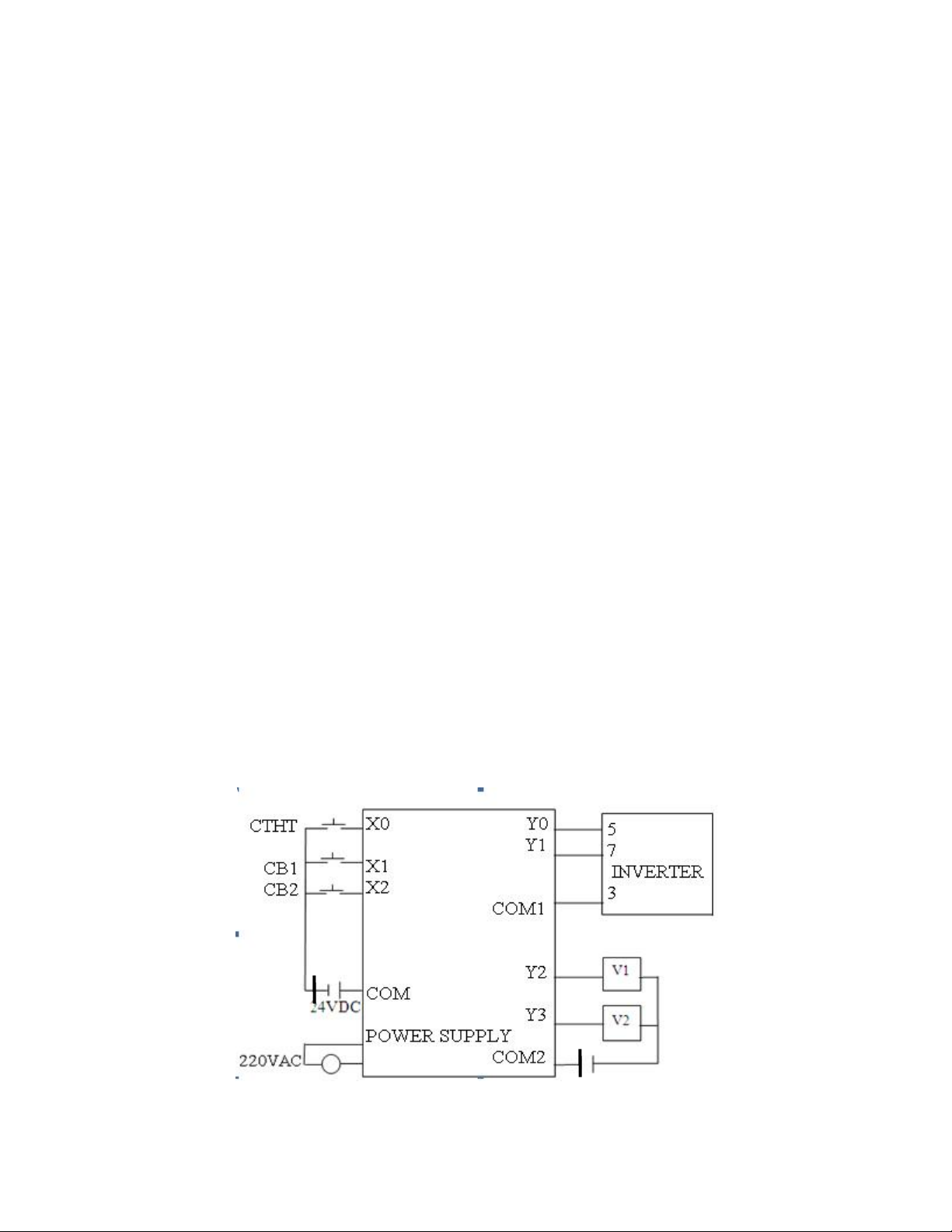
III. SƠ ĐỒ LIÊN KẾT NGÕ VÀO/NGÕ RA CỦA HỆ THỐNG.
Hình 3.4: Sơ đồ kết nối.
Trong đó:
CB1: cảm biến 1.
24VDC
CB2: cảm biến 2.
CTHT: công tắc hành trình.
V1: valve 1.
V2: valve 2.
INVERTER: biến tần (3, 5, 7 là chân 3, 5, 7 trên biến tần).
IV. CHƯƠNG TRÌNH VIẾT TRÊN PLC.
1. Khai báo cấu hình cho PLC.
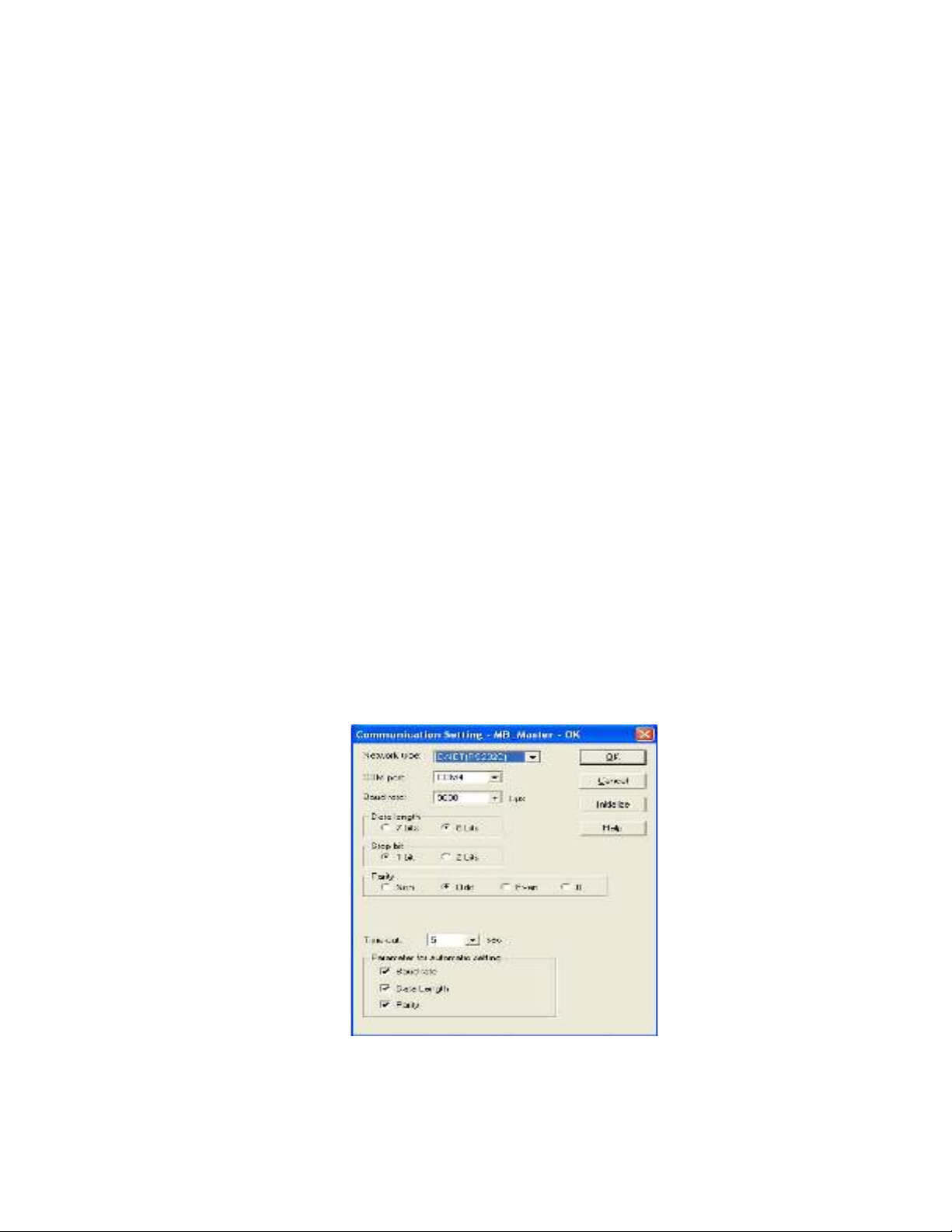
1.1. Truyền thông.
Trong giao diện FPWIN GR, từ trình đơn Option / Communication Settings…
Xuất hiện hộp thoại Communication Setting.
Trong hộp thoại Communication Setting lần lượt khai báo như sau:
Network type: Chọn C-NET(RS232C).
COM Port: Chọn COM4 hoặc tùy theo Driver cổng COM (USB) của máy mà
chọn COM khác nhau.
Baud rate: 9600 bps.
Data length: Chọn 8 bits.
Stop bit: Chọn 1 bit.
Paraty: Chọn Odd.
Time-out: Chọn 5s.
Parameter for automatic setting: Chọn hết cả 3 lựa chọn Baud rate, Data length
và Paraty.
Chọn OK để kết thúc cài đặt.
Hình 3.5: Cài đặt giao tiếp giữa máy tính và PLC.
1.2. Cài đặt cấu hình cho TOOL PORT
Trong giao diện FPWIN GR, từ trình đơn Option / PLC Configuration. Xuất hiện
hộp thoại PLC Confguration.
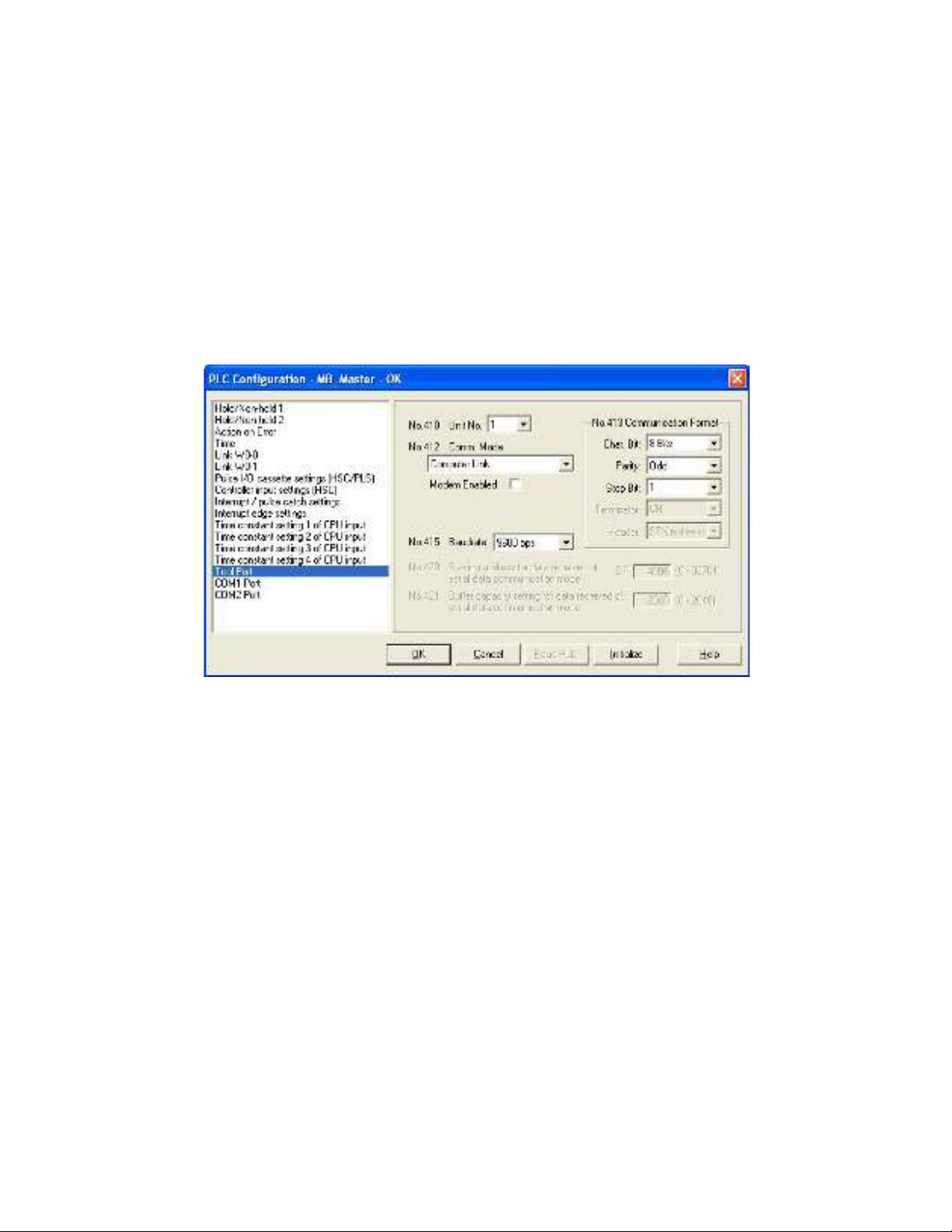
Trong phần Tool Port lần lượt khai báo như sau:
Unit No.: Chọn số 1.
Comm. Mode: Chọn kiểu truyền Computer Link.
Communication Format:
Char. Bit: Chọn 8 Bits.
Paraty: Chọn Odd.
Stop Bit: Chọn 1.
Baudrate: Chọn tốc độ 9600 bps.
Chọn OK để kết thúc cài đặt.
Trong hộp thoại PLC Configuration chọn Tool Port.
Hình 3.6: Cài đặt thông số cổng Tool Port.






![SCADA, DCS: Tìm hiểu và ứng dụng trong công nghiệp [A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130701/lilinz/135x160/5571372680022.jpg)

![DCS và SIS: Khái niệm và Thực tiễn [Cập nhật mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2013/20130623/sea123123/135x160/1504773_269.jpg)














![Giáo trình Xử lý sự cố Diesel tàu thủy (Nghề Khai thác máy tàu thủy, Trình độ Trung cấp) - Trường Cao đẳng Nông nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260508/songngu_011/135x160/23801778744471.jpg)

