26
CHƯƠNG 4: MA SÁT.
I. KHÁI NIỆM VÀ PHÂN LOẠI MA SÁT.
1. Định nghĩa.
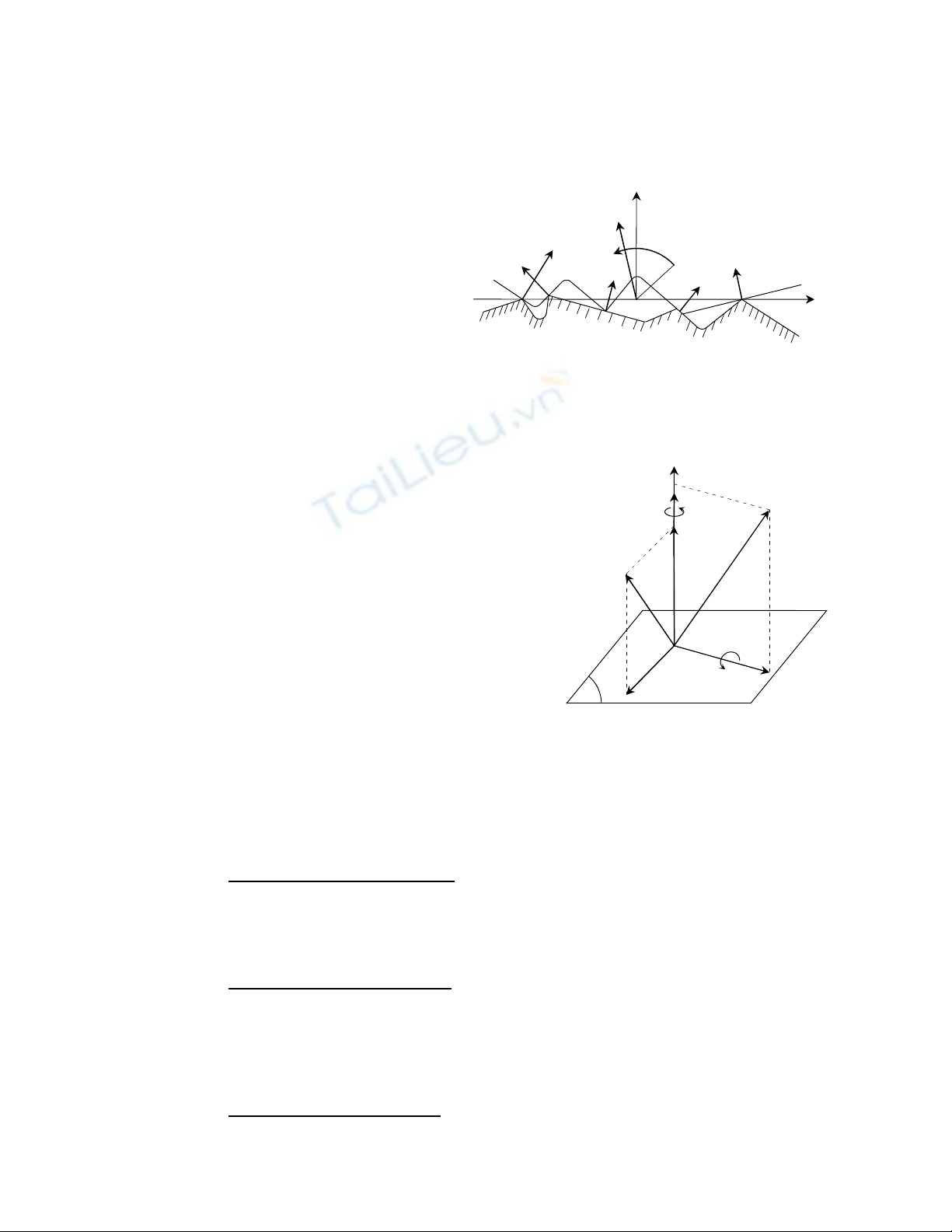
Trong thực tế do tính không
tuyệt đối rắn và tuyệt đối nhẵn của hai
mặt tựa nên vật rắn tiếp xúc với mặt
tựa không phải tại một điểm mà tại vô
số điểm.
Có thể xem rằng tại mỗi tiếp điểm,
mặt tựa tác dụng lên vật khảo sát một
pháp tuyến
k
N
ur
và do đó vật khảo sát
phải chịu tác dụng một hệ phản lực liên kết (
k
N
ur
). Thu gọn hệ lực đó về một điểm A trên mặt
tiếp xúc, ta sẽ được phản lực
A
R
ur
và ngẫu lực có mômen
A
M
uur
.
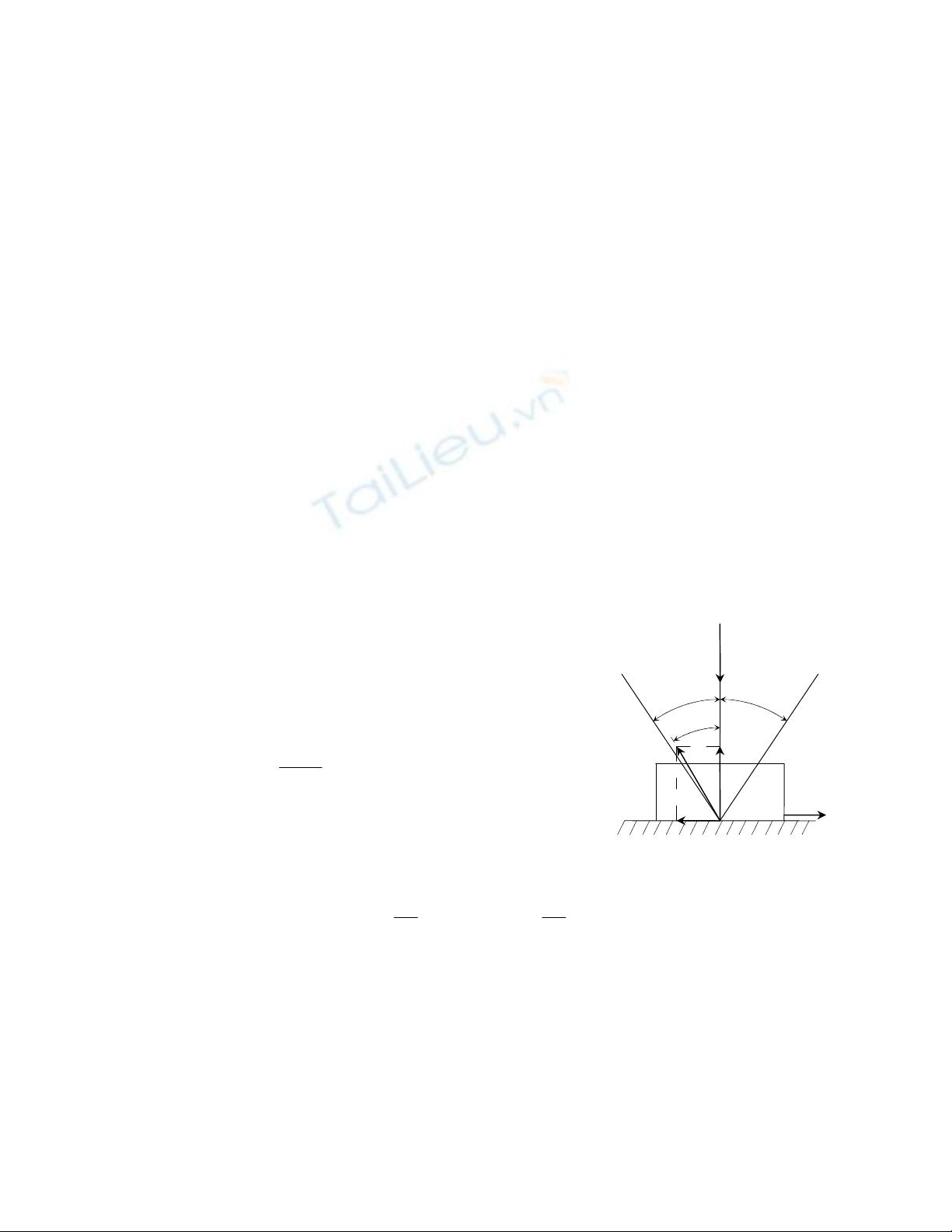
Phân tích
A
R
ur
thành 2 thành phần
N
ur
và
ms
F
r
trong đó
N
ur
nằm theo pháp tuyến
An
uuur
và
ms
F
r
nằm trong mặt phẳng tiếp tuyến π.
Mômen
A
M
uur
cũng tách ra thành hai thành phần
1
M
uur
và
2
M
uur
. Trong đó
1
M
uur
hướng theo pháp tuyến
An
uuur
,
2
M
uur
nằm trong mặt phẳng tiếp tuyến π.
Tác dụng của các phản lực thành phần như sau:
- Phản lực pháp tuyến
N
ur
cản vật khảo sát
lún vào mặt tựa (giả thuyết rắn tuyệt đối).
- Phản lực tiếp tuyến
ms
F
r
cản chuyển động
trượt hay xu hướng trượt của vật khảo sát trên mặt
tựa.
- Ngẫu lực
1
M
uur
cản chuyển động xoay hoặc
xu hướng xoay quanh
An
uuur
.
- Ngẫu lực
2
M
uur
cản chuyển động lăn hoặc xu hướng lăn của vật trên mặt tựa.
Như vậy: Ma sát là hiện tượng xuất hiện những lực và ngẫu lực có tác dụng cản trở
các chuyển động hoặc các xu hướng chuyển động tương đối của hai vật trên bề mặt của
nhau.
2. Phân loại.
a. Ma sát tĩnh và ma sát động:
- Ma sát được gọi là tĩnh khi giữa hai vật mới chỉ có xu hướng chuyển động tương
đối nhưng còn vẫn ở trạng thái cân bằng tương đối.
- Ma sát được gọi là động nếu hai vật tiếp xúc chuyển động tương đối với nhau.
b. Ma sát trượt và ma sát lăn:
- Nếu xu hướng chuyển động hoặc chuyển động xảy ra giữa hai vật là trượt, ta có ma sát
trượt.
- Nếu xu hướng chuyển động hoặc chuyển động xảy ra giữa hai vật là lăn, ta có ma sát
lăn.
c. Ma sát khô và ma sát ướt:
- Ma sát được gọi là khô khi hai vật tiếp xúc trực tiếp với nhau.
1
N
ur
2
N
ur
3
N
ur
4
N
ur
5
N
ur
τ
A
n
A
R
ur
A
M
uur
n
π
1
M
uur
N
ur
A
M
uur
2
M
uur
A
R
ur
ms
F
r
27
- Ma sát được gọi là ướt khi hai vật tiếp xúc gián tiếp với nhau thông qua một màng
bôi trơn (dầu, khí…)
Ta chỉ khảo sát ma sát tĩnh và ma sát khô.
II. MA SÁT TRƯỢT . ĐỊNH LUẬT CULÔNG. GÓC VÀ NÓN MA SÁT.
1. Ma sát trượt.
Xét vật rắn trên mặt nằm ngang, chịu lực ép
Q
ur
thẳng góc với mặt ngang và chịu lực
kéo
P
ur
theo mặt ngang. Ta thấy vật vẫn cân bằng khi trị số của lực
P
ur
không vượt quá giá
trị P0 tức là
0
PP
≤
. Giá trị P0 tỷ lệ với lực ép Q theo hệ số tỷ lệ f, nghĩa là: 0
Pf.Q
=
f phụ thuộc: + Vaät lieäu taïo caùc maët tieáp xuùc.
+ Traïng thaùi beà maët tieáp xuùc (thoâ
, nhaün) giöõa caùc beà maët.
Như vậy:
- Ngoài phản lực pháp tuyến
N
ur
cân bằng với lực ép
Q
ur
cón có lực cân bằng với lực
kéo
P
ur
gọi là lực ma sát, ký hiệu
ms
F
r
. Lực ma sát ngược chiều với lực kéo
P
ur
nghĩa là
ngược chiều với xu hướng trượt.
- Giá trị của lực ma sát trượt không thể lớn tuỳ ý mà bị hạn chế, giá trị cực đại của nó
tỷ lệ với giá trị của lực ép
Q
ur
, nghĩa là tỷ lệ với giá trị của phản lực pháp tuyến
N
ur
,
2. Định luật Culông.
Lực ma sát trượt xuất hiện khi có xu hướng trượt tương đối, nằm theo tiếp tuyến
của mặt tựa tiếp xúc, ngược hướng trượt và có giá trị bị chặn trên.
Fms≤ f.N = Fms max. (4.1)
Dấu bằng xảy ra khi vật sắp bị trượt.
Trong đó: f: Hệ số ma sát trượt tĩnh, khô.
N: Giá trị của lực pháp tuyến.
3. Góc và nón ma sát.
- Góc ma sát, ký hiệu là ϕ, được xác định bởi hệ
thức:
msmax
F
tgf
N
ϕ==
⇒ ϕ = arctg(f) (4.2)
- Nón ma sát là phần giới hạn bởi hai nửa đường
thẳng xuất phát từ điểm tiếp xúc của hai vật và nghiêng với
pháp tuyến một góc bằng góc ma sát ϕ (nếu f= tgϕ có cùng
giá trị theo mọi hướng trượt thì trong không gian có nón ma sát tròn xoay).
Có thể biểu diễn hình học định luật Culông:
ms
ms
F
Ff.Nf
N
≤⇒≤
. Ta có
ms
F
tg
N
α= . (α là tạo bởi
R
ur
,
N
ur
)
⇒
tgα ≤ f = tgϕ ⇔ α ≤ ϕ (4.3). Dấu bằng xảy ra khi vật sắp bị trượt.
4. Bài toán cân bằng khi có ma sát trượt.
Gồm các bước sau:
- Phân tích hệ lực tác dụng lên vật khảo sát.
- Viết hệ phương trình cân bằng cho hệ lực.
- Viết phương trình ma sát trượt ở dạng tổng quát hoặc ở dạng tới hạn.
- Biện luận tìm kết quả.
* Điều kiện để vật chịu ma sát trượt cân bằng là: “Phản lực toàn phần của các liên
kết tựa có ma sát trượt nằm trong nón ma sát”
Q
ur
P
ur
ms
F
r
R
ur
N
ur
ϕ
ϕ
α
28
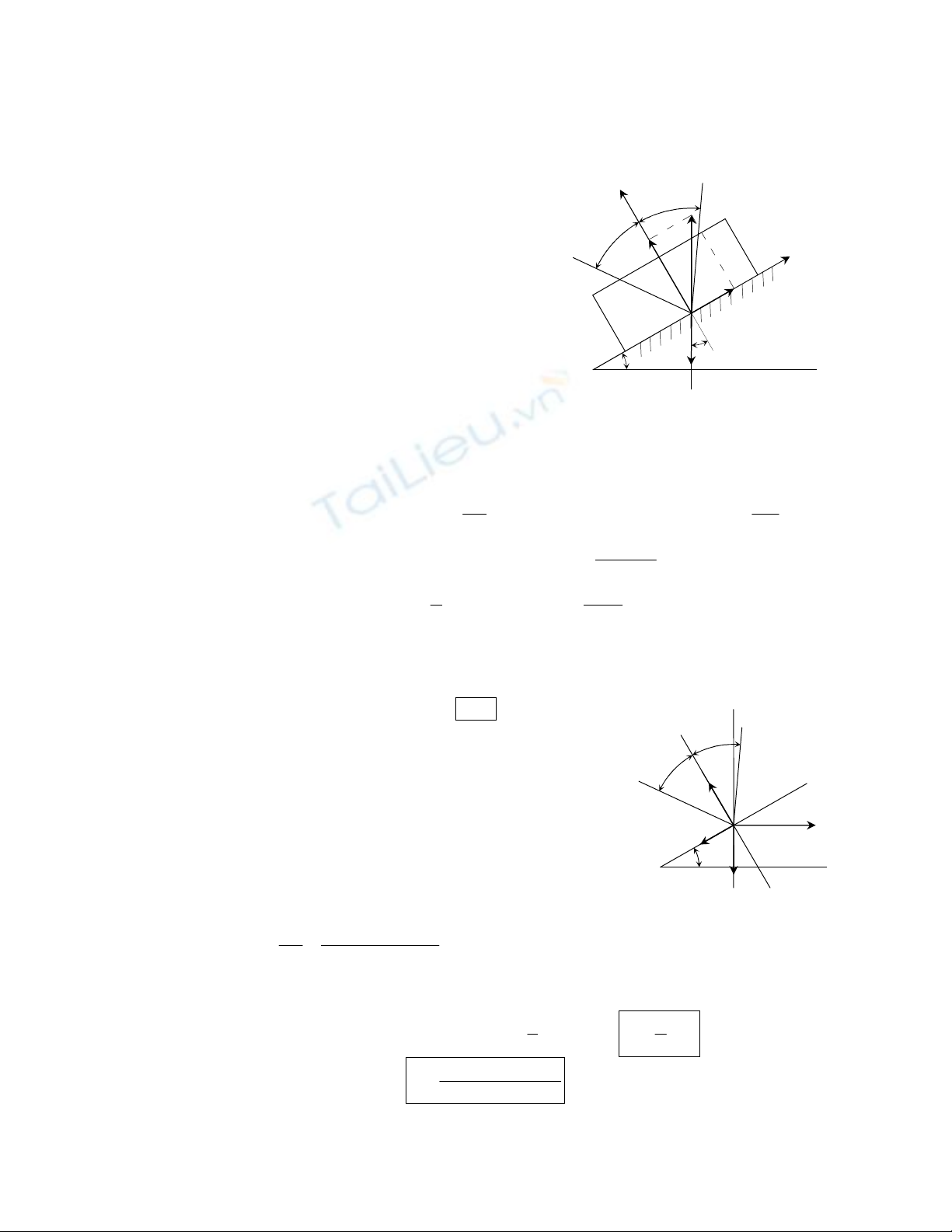
Thí dụ: Một vật rắn nằm trên mặt phẳng không nhẵn có hệ số ma sát trượt f, nghiêng
với mặt phẳng ngang một góc α.
1. Xác định góc α để vật rắn cân bằng dưới tác dụng của lực
P
ur
hướng thẳng đứng
xuống dưới và có giá trị lớn tuỳ ý.
2. Giả sử lực
P
ur
cho trước và vật chịu tác dụng
của lực
Q
ur
nằm ngang: xác định góc α để vật có thể
trượt lên.
Bài giải:
1. Vật chịu tác dụng của:
Trọng lực
P
ur
hướng xuống.
Phản lực
N
ur
hướng vuông góc với mặt
tựa.
Lực
ms
F
r
hướng song song mặt tựa.
Như vậy vật chịu tác dụng của hệ lực đồng quy
(
)
ms
P,N,F
ururr
. Điều kiện cân bằng của vật:
(
)
ms
P,N,F0
≡
ururr
kxms
ky
FFPsin0
FNPcos0
=−α=
⇔
=−α=
∑
∑ (1)
Từ (1) ⇒ms
FPsin
=α
⇒ sinα=
ms
F
P
. Thay ms
Ff.N
≤
vào ta được: sinα
f.N
P
≤
Mặt khác (1)⇒
NPcos
=α
tức sin f.P.c f.c
os
os
P
α
≤=α
Với 0
2
π
≤α≤
thì
cos0
α≥
⇒sin
ftg
cos
α
≥=α
α
,
Theo (4.2) thì
ftg
=ϕ
nên
ftgtg
=ϕ≥α
⇔
α≤ϕ
.
Vậy điều kiện để vật cân bằng là:α ≤ ϕ.
Cũng có thể xét theo điều kiện: để vật cân bằng thì phương của lực hoạt động
P
ur
phải
không được nằm ngoài nón ma sát ⇒ α ≤ ϕ.
2. Vật chịu tác dụng của hệ lực
(
)
ms
P,N,F,Q
ururrur
. Điều
kiện cân bằng:
(
)
ms
P,N,F,Q0
≡
ururrur
kxms
ky
FQcosFPsin0
FNQsinPcos0
=α−−α=
⇔
=−α−α=
∑
∑ (1)
Ở trạng thái giới hạn: Fms = f.N (2).
Từ (1) ⇒ms
FQcosPsin
NQsinPcos
=α−α
=α+α
⇒
ms
F
Psin
f
NPcoss
Qcos
Qsin
α−α
==
α+α
⇒
Q (cosα - fsinα) = P (sinα +fcosα).
Vế phải luôn luôn dương do vậy để phương trình có nghiệm thì vế trái cũng phải
dương
⇒ (cosα - fsinα) > 0 ⇔ tgα<
1
f
=cotgϕ ⇔
2
π
α<−ϕ
.
Để vật trượt lên được thì
P(sinfcos)
Q
cosfsin
α+α
≥
α−α
.
α
ϕ
ϕ
N
ur
Q
ur
P
ur
ms
F
r
y
x
ϕ
ϕ
ϕ
α
α
N
ur
R
ur
ms
F
r
P
ur
29
III. MA SÁT LĂN:
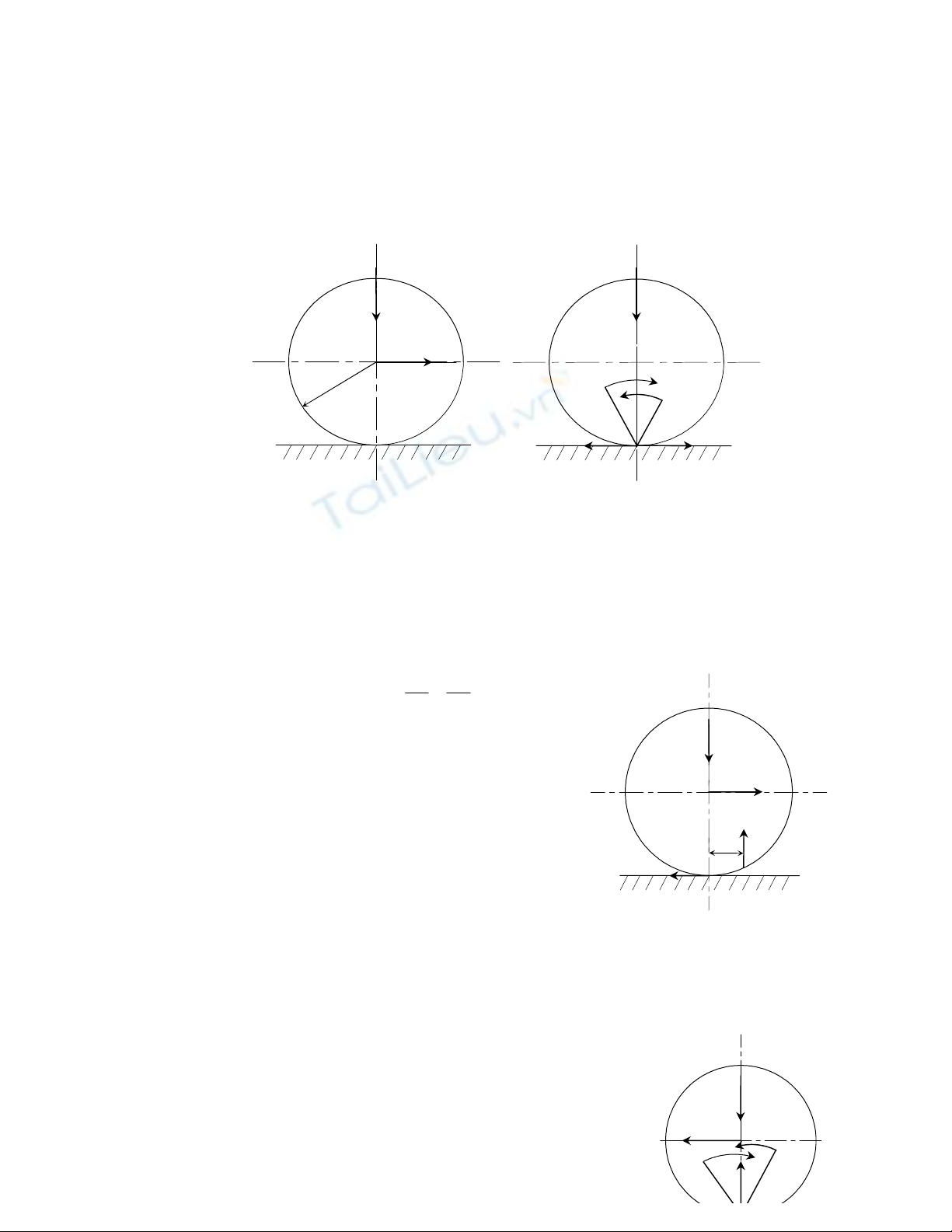
1. Ma sát lăn: Xét bánh xe có bán kính R, đặt trên mặt bàn nằm ngang chịu lực
nén
Q
ur
thẳng đứng qua tâm, và chịu lực kéo
P
ur
đặt tại tâm nằm ngang như hình vẽ.
Dời // lực
P
ur
đến tiếp điểm ta được lực
P
′
uur
và một ngẫu lực cùng chiều quay của
P
ur
quanh I có mômen M = P.R. Lực
P
ur
gây trượt và mômen M = P.R gây lăn.
Để bánh xe lăn không trượt thì: P ≤ Fms= f.N = f.Q
Để bánh xe không lăn thì M ≤ Ml
M
l
được gọi là mômen ma sát lăn. Thực nghiệm chứng tỏ rằng mômen ma sát lăn tỷ
lệ với lực nén
Q
ur
, tức là lực
N
ur
, qua hệ số tỷ lệ k: Ml = k.N
k: gọi là hệ số ma sát lăn, có thứ nguyên độ dài, phụ thuộc vào vật liệu tạo thành 2
vật tiếp xúc và trạng thái bề mặt tiếp xúc. Thông thường k << f.
2. Ngẫu lực ma sát lăn và định luật ma sát lăn:
M
l
gọi là mômen của ngẫu lực ma sát lăn có tác dụng chống lại sự lăn của bánh xe do
ngẫu lực M gây lăn sinh ra.
Có thể diễn ta khả năng chống lăn bằng cách dời song song lực
N
ur
về phía bánh xe
có xu hướng lăn một đoạn: l
MkN
dk
NN
=≤=
⇔ d ≤ k.
Vậy khi có ma sát lăn, phản lực pháp tuyến
N
ur
nằm ở
phía vật có xu hướng lăn đến và cách pháp tuyến một
đoạn d≤ k.
* Định luật ma sát lăn: Ngẫu lực ma sát lăn xuất
hiện khi có xu hướng lăn tương đối, có chiều ngược với
chiều của xu hướng lăn và có giá trị: Ml ≤ kN.
Vì k << f nên trong nhiều trường hợp có thể bỏ qua.
3. Bài toán cân bằng khi có ma sát
lăn:
Gồm các bước sau:
- Phân tích hệ lực tác dụng lên vật khảo sát.
- Viết hệ phương trình cân bằng cho hệ lực.
- Viết phương trình ma sát trượt, ma sát lăn ở dạng tổng quát hoặc ở dạng tới hạn.
- Biện luận để tìm kết quả.
Thí dụ: Trên mặt phẳng nằm ngang có bánh xe đồng chất
tâm O bán kính R, trọng lượng P chịu tác dụng của ngẫu lực
M
uur
và
lực
Q
ur
như hình vẽ. Biết hệ số ma sát trượt là f, hệ số ma sát lăn k.
xác định trị số của mômen
M
uur
và của lực
Q
ur
để bánh xe có thể lăn
không trượt.
Q
ur
Q
ur
P
ur
P
′
uur
ms
F
r
M
l
M
I I
Q
ur
P
ur
N
ur
ms
F
r
d
P
ur
Q
ur
N
ur
F
r
l
M
M

30
Bài giải:
Vật chịu tác dụng của hệ lực
(
)
l
P,Q,N,M,M
urururuuruur
.
Điều kiện cân bằng:
(
)
l
P,Q,N,M,M0
≡
urururuuruur
⇔
Xms
Y
Il
FFQ0
FPN0
MQRMM0
=−=
=−=
=×+−=
∑
∑
∑⇒
ms
l
FQ(1)
PN(2)
MMQ.R(3)
=
=
=+
Để vật lăn thì : l
MQ.RMk.NMk.NQ.Rk.PQ.R
−>=⇔>+=+
Để vật không trượt thì: ms
QFf.Nf.P
<==
Để vật lăn không trượt thì :
Mk.PQ.R
Qf.P
>+
<
(4) .
Mặt khác thay (1) vào (3) ta có lms
MMF.R
=+
. Mà ms
Ff.Nf.P
≤=
và l
Mk.Nk.P
≤=
⇒
(
)
Mk.Pf.P.RPkf.R
≤+=+ (5).
Kết hợp (4) và (5) ta có
(
)
Pkf.RMk.PQ.R
Qf.P
+≥>+
<





















![Đề thi học kì 2 môn Vật lí 1 năm 2023-2024 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/64291778553454.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/1381778553461.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2022-2023 có đáp án [kèm PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/21778553462.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)