Đồ án tốt nghiệp
Trường Đại Học Bách Khoa Hà Nội 1
CHƯƠNG I
TỔNG QUAN VỀ CÁC PHƯƠNG PHÁP ĐIỀU CHỈNH TỐC ĐỘ
ĐỘNG CƠ MỘT CHIỀU KÍCH TỪ ĐỘC LẬP
1.1. khái quát chung:
Động cơ điện một chiều cho phép điều chỉnh tốc độ quay liên tục trọng một phạm
vi rộng và trong nhiều trường hợp cần có đặc tính cơ đặc biệt, thiết bị đơn giản hơn
và rẻ tiền hơn các thiết bị điều khiển của động cơ ba pha.Vì một số ưu điểm như
vậy cho nên động cơ điện một chiều được sử dụng rất phổ biến trong công nghiệp,
trong giao thông vận tải….
2.1. Phương trình đặc tính cơ:
Để điều khiển được tốc độ động cơ điện một chiều kích từ độc lập thì ta phải phân
tích, tìm các mối quan hệ giữa tốc độ với các thông số khác của động cơ để từ đó
đưa ra phương pháp điều khiển. Động cơ điện một chiều kích từ độc lập thì dòng
kích từ độc lập với dòng phần ứng. Vì được nuôi bởi hai nguồn một chiều độc lập
với nhau.
Eu
Iu
Uu
Rf
Ikt
Ukt
Rkt
Ckt
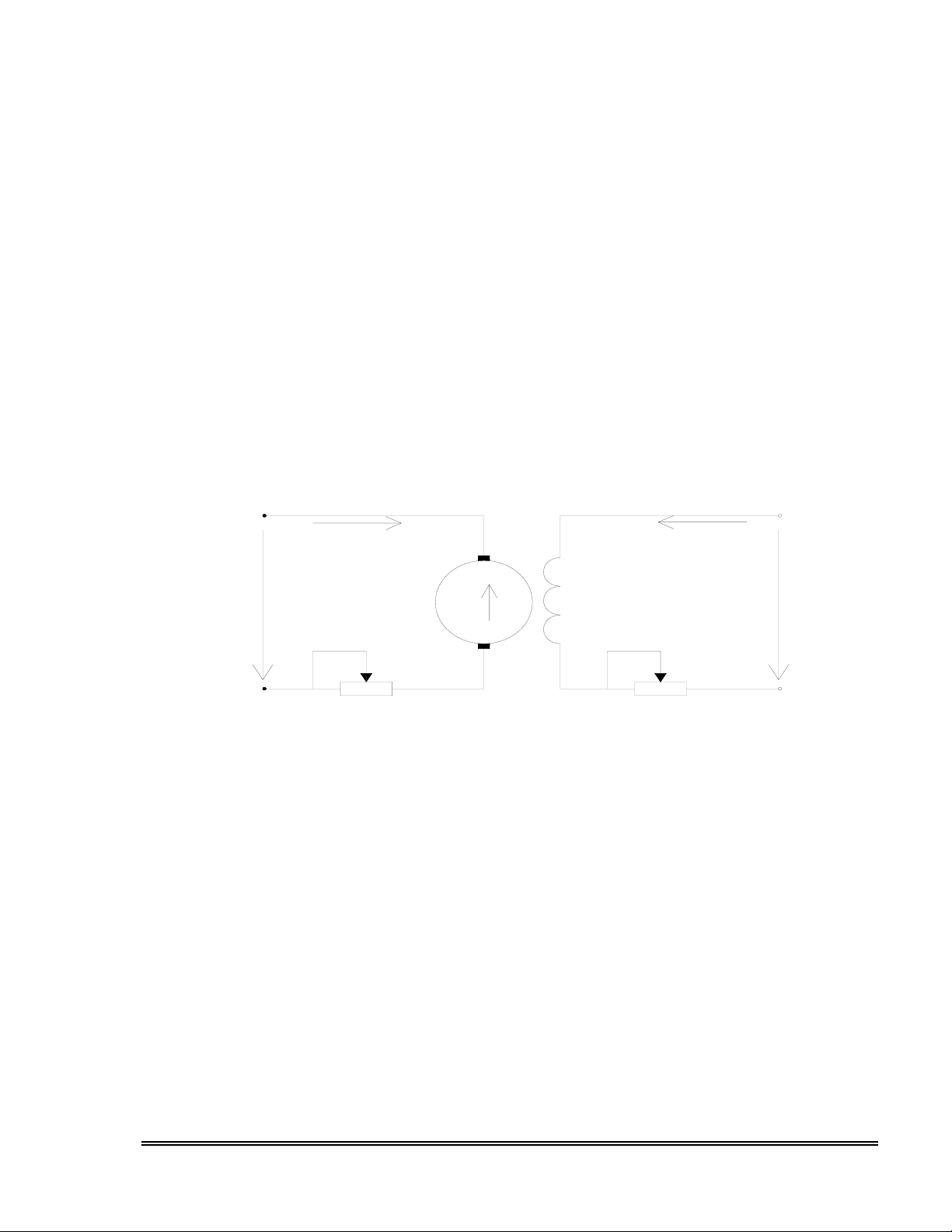
Hình 1. Sơ đồ nối dây của động cơ một chiều kích từ độc lập
Theo hình 1 ta viết phương trình cân bằng điện áp của mạch phần ứng
U
ư =Eư + ( Rư + Rf)Iư (1)
Trong đó: Uư : Điện áp đặt lên phần ứng động cơ (V).
Eư : Sức điện động phần ứng (V)
R
ư : Điện trở của mạch phần ứng (
Ω
)
R
f : Điện trở phụ trong mạch phần ứng (Ω)
I
ư : Dòng điện mạch phần ứng (
Α
)
Với Rư = rư + rcf +rb + rct
Trong đó : rư điện trở cuộn dây phần ứng (
Ω
)
r
cf : Điện trở cuộn cực từ phụ (
Ω
)
r
b : Điện trở cuộn bù (
Ω
)
r
ct : Điện trở tiép xúc chổi điện (
Ω
)
•Sức điện động Eư của phần ứng động cơ được xác định theo biểu thưc sau
Đồ án tốt nghiệp
Trường Đại Học Bách Khoa Hà Nội 2
E
ư = a
PN
π
2
φω
=
κ
φ
ω
(2)
trong đó : p : Số đôi cực từ chính
N : Số thanh dẫn tác dụng của cuộn dây phần ứng
a : Số đôi mạch nhánh song song của cuộn dây phần ứng
φ
: Từ thông kích từ dưới mỗi cực từ (wb)
ω : Tốc độ góc (rad/s)
k =
a
PN
π
2 : Hệ số cấu tạo của động cơ
Nếu biểu diễn sức điện động theo tốc độ quay n (vòng/ phút) thì
E
ư = e
k
φ
n ( 3)
ω = 60
2n
π
=55,9
n
vì vậy Eư = a
PN
60 n
φ
với ke = a
PN
60 : Hệ số sức điện động của động cơ
k
e =55,9
k ≈ 0,105 k
Thay (1) vào (2) và biến đổi ta được
ω = u
U
K
φ
-
()
+
uf
K
RR
φ
Iư(4)
Biểu thức (4) là phương trình đặc tính cơ điện của động cơ.Mặt khác, mômen điện
từ Mđt = u
kI
φ
(5)
Nếu bỏ qua tổn thất trong các ổ trục, tổn thất tự quạt mát và tổn thất trong thép thì
mômen cơ trên trục của động cơ bằng mômen điện từ, ta ký hiệu là M, tức là Mđt =
Mcơ =M
Vậy phương trình đặc tính cơ của động cơ là
ω = u
k
U
φ-2
)(
φ
k
RR fu +M (6)
Biểu thức (6) là phương trình đặc tính cơ của động cơ điện một chiều kích từ độc
lập
Nếu không xét đến ảnh hưởng của phản ứng phần ứng ngang trục làm giảm từ
thông φ của động cơ tức là xem φ=const thì quan hệ ω=f(M,I) là tuyến tính.
Đồ án tốt nghiệp
Trường Đại Học Bách Khoa Hà Nội 3
ω
0
ω
dm
ω
Δ
IM dmdm,IM nmnm ,
IM ,
0
ω
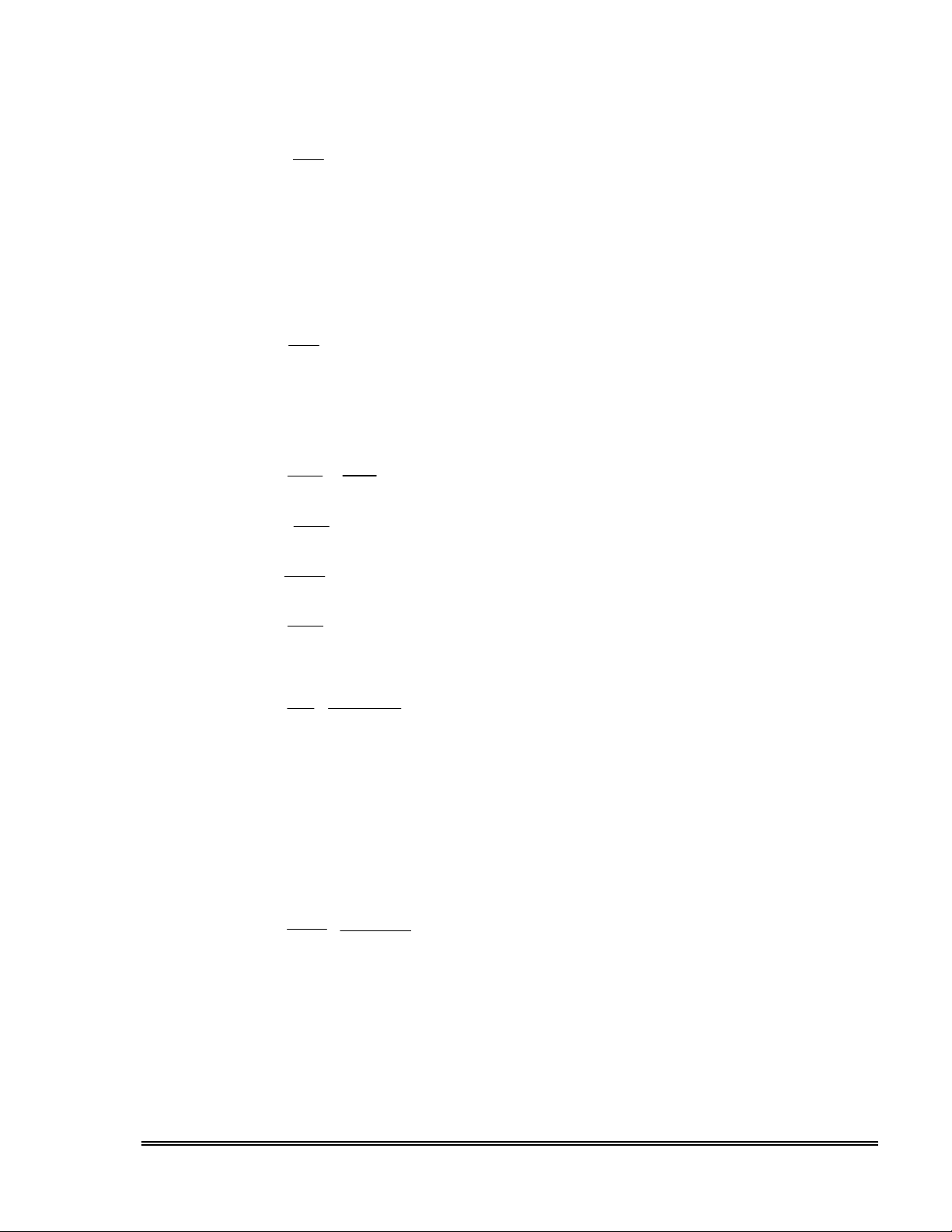
Hình 2 đồ thị đặc tính cơ của động cơ điện một chiều kích từ độc lập
Từ đồ thị ta có : khi Iư = 0 hoặc M =0 ta có
ω
=
φ
k
U =ω0 (7)
ω0 : được gọi là tốc độ không tải lý tưởng của động cơ , khi ω=ω0 ta có
Iư = RR fu
U
+=Inm (8)
Và M =k
φ
Inm =Mnm (9)
Inm, Mnm : được gọi là dòng điện ngắn mạch và mômen ngắn mạch. Mặt khác
phương thình đặc tính (4) và (6) cũng có thể viết dưới dạng
ω =
φ
k
Uu-
φ
k
RIư =ω0 -
ω
Δ (10)
ω =
φ
K
Uu-)( 2
φ
k
RM = ω0 -
ω
Δ
(11)
vì Iư =
φ
K
M ta suy ra từ (5)
trong đó R = Rư + Rf , ω0 =
φ
K
Uu
Δω=
φ
K
R Iư = )( 2
φ
k
RM (12)
Đồ án tốt nghiệp
Trường Đại Học Bách Khoa Hà Nội 4
Δω : được gọi là độ sụt tốc độ ứng với giá trị của M (hay I) , ta có thể biểu diễn đặc
tính cơ điện và đặc tính cơ trong hệ đơn vị tương đối với điều kiện từ thông là định
mức (
φ
=
φ
dm )
Trong đó ω*=
0
ω
ω
, I* =
dm
I
I
,M∗ =
dm
M
M, R* = Rcb
R
( Rcb =Uđm/ Iđm được gọi là điện trở cơ bản )
Từ (4) và (6) ta viết đặc tính cơ điện và đặc tính cơ ở đơn vị tương đối
ω*=1- R*I* (13)
ω∗ = 1- R*M∗ (14)
• Độ cứng của đặc tính cơ :
β=
ω
d
dM = R
knm
∑
)2
(
φ
(15)
• Công suất (năng lượng điện)
Từ phương trình lý tưởng : IU =(Eư +IRư)I (16)
Ta có Pđiện =Pđt +ΔΡ
Trong đó Pđt =IEư công suất điện từ
ΔP =I2Rư tổn hao công suất cơ trên điện trở phần ứng
Thực tế P
điện =Pđt + ΔPư + ΔP0 (17)
Với ΔP0 tổn hao ma sát do sự quay
Từ biểu thức (4) hoặc (6) ta thấy
ω
là một hàm phụ thuộc R,
φ
, U :
〈ω=f(R,Φ,U)® do đó để điều chỉnh tốc độ động cơ điện một chiều kích từ độc lập
có ba phương pháp điều khiển sau :
- Điều khiển điện trở phụ phần ứng
- Điều khiển từ thông kích từ
- Điều khiển điện áp phần ứng
Sau đây ta xem xét từng phương pháp điều khiển một
2. CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN ĐỘNG CƠ ĐIỆN MỘT CHIỀU KÍCH
TỪ ĐỘC LẬP
2.1 Phương pháp điều khiển bằng điện trở phụ phần ứng (Rf):
•Nguyên lý điều chỉnh:
Nối thêm điện trở phụ Rf vào mạch phần ứng
Ta đã phân tích ở trên nên ta có ω= f〈 Rf , φkt , U ®, giả thiết rằng :
Nếu giữ φ=φđm=const ; U= Uđm = const; Rư =const thì ω=f(Rf)
Muốn thay đổi được giá trị Rf của mạch phần ứng bằng cách nối tiếp một điện trở
phụ (Rf) thay đổi được giá trị vào mạch phần ứng.
Lúc này ta có : R = Rư + Rf
Đồ án tốt nghiệp
Trường Đại Học Bách Khoa Hà Nội 5
Từ phương trình đặc tính cơ : ω=
φ
dm
dm
K
U- )
(2
φ
K
RR
dm
fu +M
Từ phương trình trên ta thấy : khi tăng giá trị của Rf thì tốc độ của động cơ giảm,
khi giảm giá trị của Rf thì tốc độ của động cơ tăng .
Lúc này ta có tốc độ không tải lý tưởng: ω0 =
φ
dm
dm
K
U = const (18)
Còn độ cứng của đặc tính cơ : β = RR
K
fu
dm
+
)2
(
φ
= var (19)
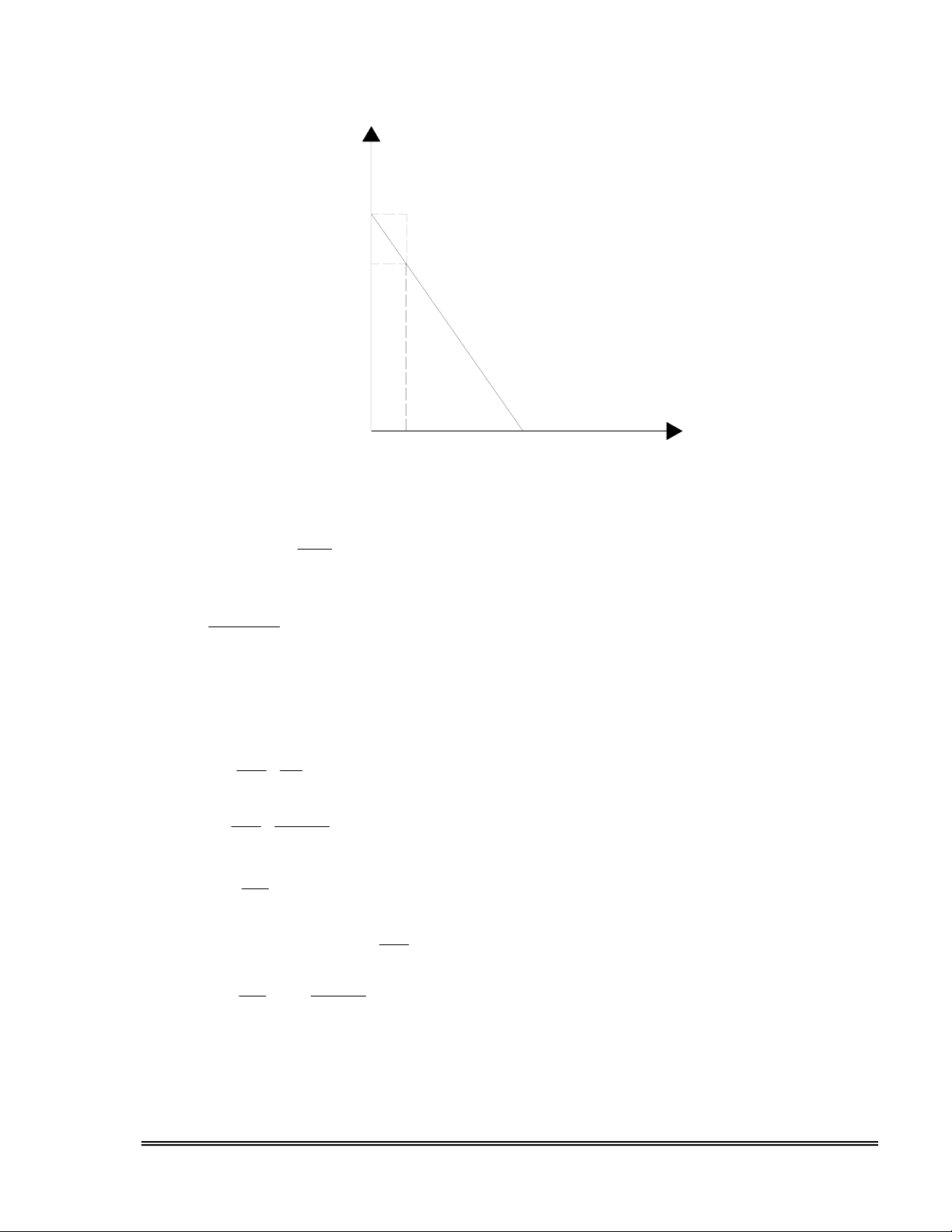
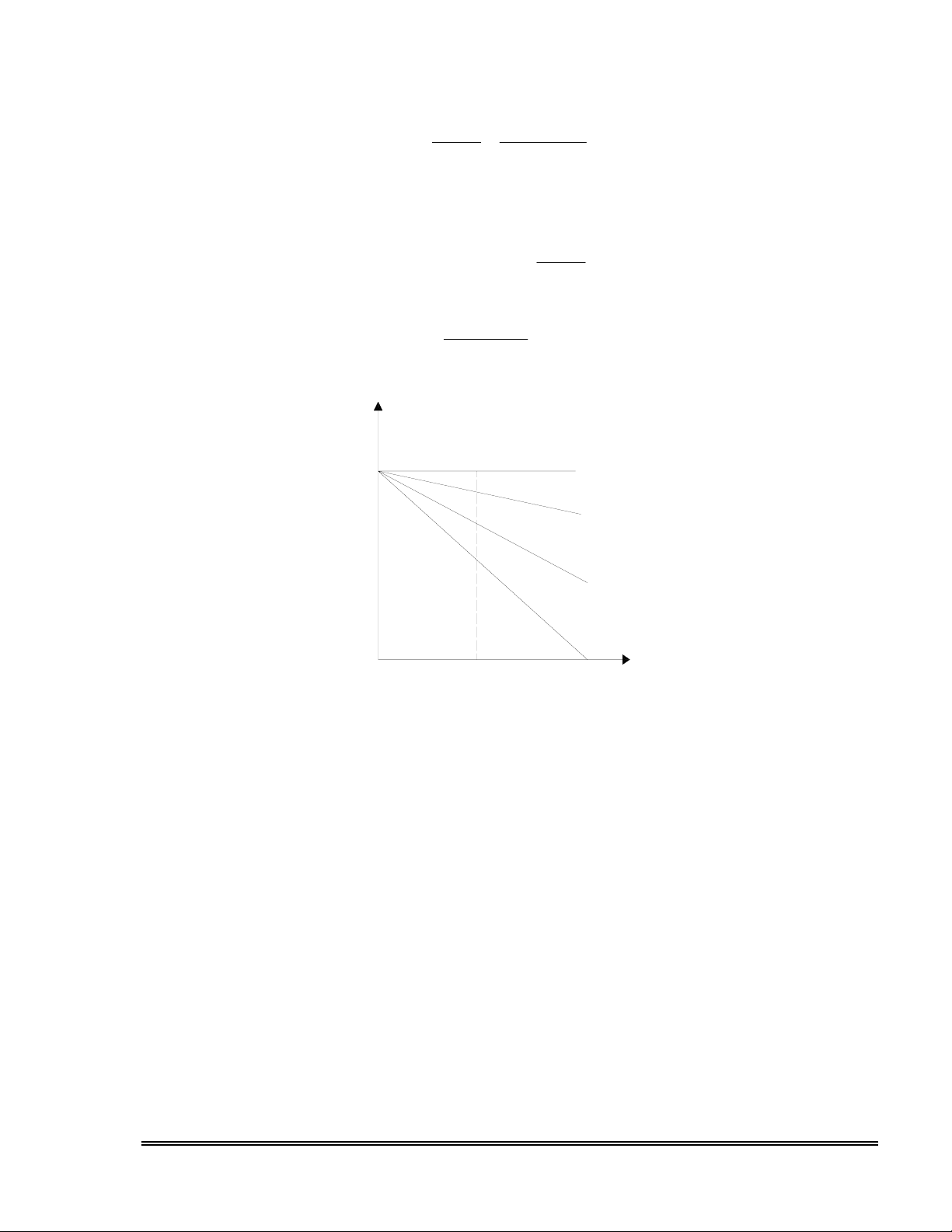
Như vậy khi thay đổi Rf cho ta một họ đặc tính như sau:
ω
0
ω
Mdm Mdm
2
0=
Rf
Rf1
Rf2
Rf3
0M
Hình 1-3 : Đặc tính cơ của động cơ điện một chiều kích từ độc lập ở những
điện trở phụ khác nhau
• Nhận xét: Nếu Rf càng lớn thì tốc độ động cơ càng giảm, đồng thời Inm và Mnm
cũng giảm. Phương pháp này được dùng để hạn chế dòng điện động cơ khi khởi
động.
- Ưu điểm : Đơn giản , dễ thực hiện
- Nhược điểm : + Độ cứng đặc tính cơ thấp
+ Tổn thất năng lượng trên điện trở lớn
+ Phạm vi điều chỉnh hẹp
2.2. Phương pháp điều chỉnh bằng từ thông kích từ:
• Nguyên lý điều chỉnh:
Điều chỉnh từ thông kích từ của động cơ điện một chiều là điều chỉnh mô men điện
từ của động cơ M = kφIư và sức điện động quay của động cơ
Eư=kφω




![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)