
CHƯƠNG 1. TỔNG QUAN
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH 1
Chương 1
TỔNG QUAN
1.1. ĐT VN Đ
Phần lớn ở trường học các khuôn viên thường xây như thư viện, căn tin, khu thể
thao, sân đá bóng, nhưng chưa thấy ngôi trường nào làm một công viên xanh thu nhỏ
với nhiều tiện ích kết hợp với các công nghệ kỹ thuật hiện nay. Ngoài ra trong thành
phố Hồ Chí Minh có rất nhiều công viên cây xanh. Nhưng dường như hiếm thấy công
viên nào còn nguyên vẹn, thay vào đó là bị lõm, khuyết với những công trình tạm
hoặc kiên cố, rồi trung tâm tiệc cưới vẫn tồn tại, điều đó thể hiện sự bất lực của chính
quyền trong việc trả lại công viên cho người dân, từ mở đường cho đến quán xá làm
mất diện tích công viên. Đáng lưu ý hơn là nhiều nơi không có công viên cây xanh
nhưng ngay cả nơi may mắn có được, người dân cũng không thể thoải mái tản bộ, thể
dục hoặc thư giãn, vui chơi do phần lớn diện tích đất công viên cây xanh bị hàng
quán, bãi giữ xe lấn chiếm, bị cho thuê tổ chức hội chợ, triển lãm, khu vui chơi có
thu tiền.
Hầu hết các công viên là khuôn viên trồng cây xanh, hệ thống tưới cây còn thô
sơ, chưa có các hệ thống đèn quạt trong công viên để phục vụ. Khả năng giữ an ninh
rất thấp. Cho nên công viên mà nhóm chúng em hướng đến là một nơi có khu tham
quan với hệ thống đo nhiệt độ độ ẩm, có hồ phun nước, đặc biệt hơn có các khu nhà
nghĩ dưỡng, sinh hoạt được gắn các thiết bị được điều khiển bằng Wifi như quạt và
đèn.
Ngoài ra để tránh những vấn đề mất cắp thường xảy ra ở thư viện các trường
học thì công viên được làm thêm thẻ RFID và thành viên làm thẻ sẽ được vào công
viên. Có hệ thống Camera giám sát các hoạt động của công viên. Nhóm đã quyết định
nghiên cứu và thi công đề tài: “Thit k v thi công mô hnh công viên 4.0”.
1.2. MC TIÊU
Thực hiện được tính thực tế và sử dụng công nghệ để thuận tiện đối với sinh
viên, người tham quan và quản lý công viên, tạo ra một địa điểm lý tưởng để mọi
người thư giản và vui chơi. Thiết kế và thi công mô hình công viên với kích thước
chiều dài 80cm, chiều rộng 80cm, chiều cao 15 cm. Sử dụng vi điều khiển PIC16F887
và Module Wifi ESP8266 làm trung tâm điều khiển. Thiết kế App trên Smartphone

CHƯƠNG 1. TỔNG QUAN
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH 2
bằng MIT App Inventer. Đo nhiệt độ, độ ẩm bằng cảm biến DHT-11, hiển thị lên
LCD 16x2 và điều khiển động cơ bơm nước và đèn sưởi. Ứng dụng công nghệ RFID
và Camera phục vụ cho việc ngăn chặn các tác nhân xấu bên ngoài như trộm, cắp
diễn ra.
1.3. NỘI DUNG NGHIÊN CU
Trong đề tài này, nhóm sẽ tiến hành nghiên cứu các nội dung như sau:
Nội dung 1: Thu thập dữ liệu về các mô hình có trong công viên và khảo sát
người đến công viên muốn công viên cần thêm nhưng mô hình và thiết bị gì để phục
vụ.
Nội dung 2: Tìm hiểu ưu và nhược điểm của một công viên đang hoạt động
hiện nay.
Nội dung 3: Tìm hiểu hệ thống nào cần trong công viên.
Nội dung 4: Thiết kế và thi công mô hình.
Nội dung 5: Đánh giá kết quả thực hiện.
Nội dung 6: Nhận xét ưu nhược điểm của toàn bộ hệ thống và hướng phát triển
đề tài.
1.4. GII HN
Đây là mô hình công viên công nghệ giai đoạn cơ bản. Sử dụng công nghệ thẻ
quẹt RIFD và Camera để giám sát người ra vào hợp lệ.
Sử dụng công nghệ RFID với 2 loại thẻ, ứng với 1 người là thẻ đúng là 1 người
là thẻ sai để ra vào công viên.
Hiển thị nội dung quảng cáo hoặc tên công viên bằng 4 Led Matrix kết nối
Bluetooth với khoảng cách điều khiển 10m.
Điều khiển đèn 12V DC và quạt 12V DC bằng cách kết nối Wifi trong công
viên và sử dụng với khoảng cách từ 10m - 20m.
Màn hình hiển thị nhiệt độ, độ ẩm và quẹt thẻ RFID chỉ là LCD 16x2.
1.5. B CC
Đ ti đưc trnh by trong 6 chương:
Chương 1: Tổng quan
Chương 2: Cơ sở lý thuyết
Chương 3: Thiết kế h thng

CHƯƠNG 1. TỔNG QUAN
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH 3
Chương 4: Thi công h thng
Chương 5: Kết quả, nhận xét v đánh giá
Chương 6: Kết huận v hướng phát triển
C thể như sau:
Chương 1: Tổng quan
Đặt vấn đề dẫn nhập lý do chọn đề tài, trình bày mục tiêu, nội dung nghiên cứu,
xác định một số giới hạn và trình bày bố cục của đề tài.
Chương 2: Cơ sở lý thuyết
Trình bày, phân tích ưu nhược điểm của các công viên hiện đang còn hoạt động,
từ đó chọn ra phương án ph hợp cho đề tài. Giới thiệu một số lý thuyết liên quan và
những phần cứng cần sử dụng cho đề tài.
Chương 3: Thiết kế h thng
Xây dựng sơ đồ khối, trình bày nguyên lý hoạt động của hệ thống. Thiết kế và
lựa chọn linh kiện ph hợp cho từng khối. Xây dựng sơ đồ nguyên lý cho từng khối
và toàn bộ hệ thống.
Chương 4: Thi công h thng
Trình bày các bước thi công mô hình hoàn chỉnh từ phần cứng đến phần mềm.
Xây dựng lưu đồ giải thuật, phương trình tính toán các thông số cụ thể, xử lý tín hiệu
và lập trình cho vi điều khiển.
Chương 5: Kết quả, nhận xét v đánh giá
Trình bày những kết quả đạt được (cấu trúc mô hình). Sau đó đưa ra nhận xét
tổng thể về đề tài cũng như những đánh giá dựa trên các mục tiêu đã đặt ra ban đầu.
Chương 6: Kết luận v hướng phát triển
Trình bày những ưu nhược điểm của toàn bộ hệ thống. Từ đó, đưa ra kết luận
và hướng phát triển cho đề tài.

CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH 4
Chương 2
CƠ SỞ LÝ THUYẾT
2.1 GIỚI THIỆU VỀ LẬP TRÌNH PIC VÀ MỘT SỐ CÔNG CỤ LIÊN QUAN
2.1.1 Ngôn ng C.
Ngôn ngữ lập trình C là một ngôn ngữ mệnh lệnh được phát triển từ đầu thập
niên 1970 bởi Ken Thompson và Dennis Ritchie để dng trong hệ điều hành UNIX.
Từ đó, ngôn ngữ này đã lan rộng ra nhiều hệ điều hành khác và trở thành một những
ngôn ngữ phổ dụng nhất. C là ngôn ngữ rất có hiệu quả và được ưa chuộng nhất để
viết các phần mềm hệ thống, mặc d nó cũng được dng cho việc viết các ứng dụng.
Năm 1989 viện tiêu chuẩn của hoa kỳ đã công bố bản chuẩn hóa C còn được gọi là
ANSI 89 (C89) sau đó năm 1990 nâng cấp bản chuẩn hóa này gọi là ANSI 90 (C90),
Hệ điều hành Unix có tới 90% là được viết bởi ngôn ngữ C. 10% là được viết bởi hợp
ngữ. Ngoài ra có rất nhiều các trình điều khiển hỗ trợ lập trình bằng ngôn ngữ C. So
với các ngôn ngữ như C++/C#, Java, ngôn ngữ C có kích cỡ nhỏ. Các thư viện trong
ngôn ngữ C là hạn chế, chỉ chứa các hàm cơ bản. Ngôn ngữ C không đưa ra các ràng
buộc đối với người lập trình. C được sử dụng trong nhiều dự án khác nhau, như viết
hệ điều hành, chương trình xử lý văn bản, đồ hoạ, bảng tính, và thậm chí cả chương
trình dịch cho các ngôn ngữ khác.
2.1.2 Công ngh RFID (Radio Frequency Identification).
Giới thiu.
RFID là công nghệ nhận dạng đối tượng bằng sóng vô tuyến. Công nghệ này
cho phép nhận biết các đối tượng thông qua hệ thống thu phát sóng radio, từ đó có
thể giám sát, quản lý hoặc lưu vết từng đối tượng.
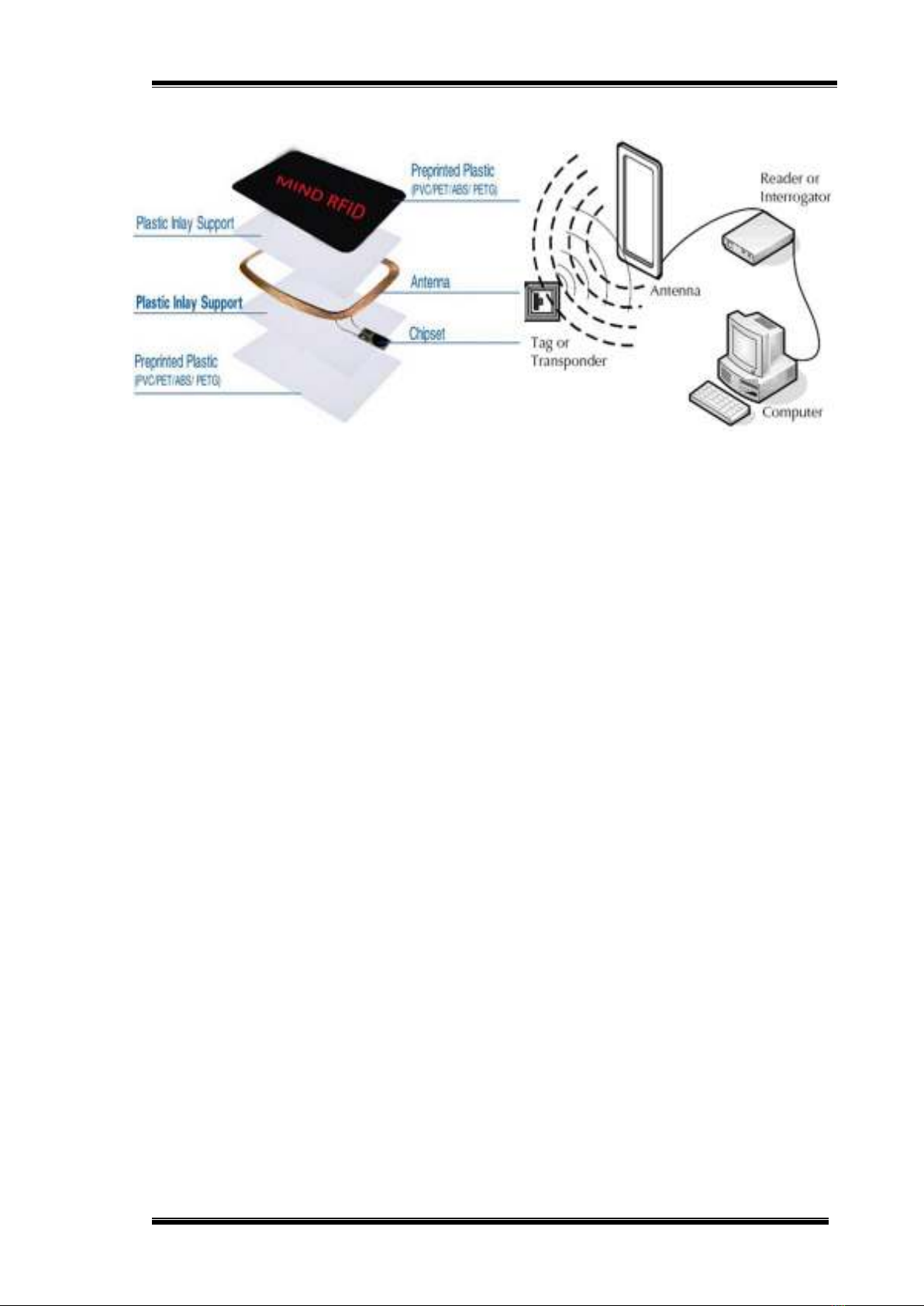
Cu to.
Một thiết bị hay một hệ thống RFID được cấu tạo bởi hai thành phần chính là
thiết bị đọc (reader) và thiết bị phát mã RFID có gắn chip hay còn gọi là tag. Thiết bị
đọc được gắn antenna để thu - phát sóng điện từ, thiết bị phát mã RFID tag được gắn
với vật cần nhận dạng, mỗi thiết bi RFID tag chứa một mã số nhất định và không
trng lặp nhau.
CHƯƠNG 2. CƠ SỞ LÝ THUYẾT
BỘ MÔN ĐIỆN TỬ CÔNG NGHIỆP – Y SINH 5
Hình 2.1 Cấu trúc thẻ RFID và hệ thống RFID cơ bản.
Nguyên lý hot đng.
Thiết bị RFID reader phát ra sóng điện từ ở một tần số nhất định, khi đặt thiết
bị RFID trong vng hoạt động sẽ cảm nhận được sóng điện từ này và thu nhận năng
lượng, từ đó phát lại cho thiết bị RFID reader biết mã số của mình. Từ đó thiết bị
RFID reader nhận biết được tag nào đang trong vng hoạt động.
ng dng.
Thẻ chip (tag) RFID chứa rất nhiều mã nhận dạng khác nhau, thông thường là
32 bit tương ứng với hơn 4 tỷ mã số khác nhau. Ngoài ra khi xuất xưởng mỗi thẻ chip
RFID được gán một mã số khác nhau. Do vậy, khi một vật được gắn chip RFID thì
khả năng nhận dạng nhầm vật đó với 1 thẻ chip RFID khác là rất thấp, xác suất là 1
phần 4 tỷ. Với ưu điểm về mặt công nghệ như vậy nên sự bảo mật và độ an toàn của
các thiết bị ứng dụng công nghệ RFID là rất cao.
– Ứng dụng quản lý lưu thông hàng hóa.
– Ứng dụng quản lý kho hàng.
– Ứng dụng quản lý thu phí đường bộ tự động.
– Bên cạnh những ứng dụng nổi bật đó còn rất nhiều những ứng dụng thiết thực
cho quản lý như: quản lý nhà máy, quản lý thư viện, quản lý chấm công, quản lý bãi
giữ xe, nhà hàng, phòng khách sạn, phòng học, quản lý nhà ăn, quản lý sinh viên,
quản lý bệnh viện, khóa cửa dng công nghệ RFID, chống trộm xe máy, …
2.1.3 Phn mm CCS.








![Thiết bị đo thông số sức khỏe tự động: Đồ án tốt nghiệp [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260408/bachduong_011/135x160/26021775636063.jpg)




![Mô hình rửa xe tự động PLC: Đồ án tốt nghiệp [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260408/bachduong_011/135x160/7671775639278.jpg)





![Thiết kế hệ thống điều khiển xả liệu: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260408/linhquang123hp@gmail.com/135x160/98981775612514.jpg)



