
Khaûo saùt öùng duïng MATLAB trong ñieàu khieån töï ñoäng
Thöïc hieän: PHAÏM QUOÁC TRÖÔØNG - 27 - GVHD: PHAÏM QUANG HUY
CAÙC BAØI TAÄP
Baøi 1: Trích töø Ví duï 3.13 saùch … taùc giaû Nuyeãn Vaên Giaùp
%Ket NOI 2 HE thong SONG SONG
a=[1 2 3;4 5 6;7 8 9];
b=[3 4;4 5;7 9];
c=[0 0 1];
d=[0 0];
e=[1 9 3;4 5 6;7 8 7];
f=[2 4;4 6;7 9];
g=[0 1 1];
h=[0 0];
[A,B,C,D]= parallel(a,b,c,d,e,f,g,h)
Keát quaû:
A =
1 2 3 0 0 0
4 5 6 0 0 0
7 8 9 0 0 0
0 0 0 1 9 3
0 0 0 4 5 6
0 0 0 7 8 7
B =
3 4 0 0
4 5 0 0
7 9 0 0
0 0 2 4
0 0 4 6
0 0 7 9

Khaûo saùt öùng duïng MATLAB trong ñieàu khieån töï ñoäng
Thöïc hieän: PHAÏM QUOÁC TRÖÔØNG - 28 - GVHD: PHAÏM QUANG HUY
C =
0 0 1 0 0 0
0 0 0 0 1 1
D =
0 0 0 0
0 0 0 0
A =
1 2 3 0 0 0
4 5 6 0 0 0
7 8 9 0 0 0
0 0 0 1 9 3
0 0 0 4 5 6
0 0 0 7 8 7
B =
3 4
4 5
7 9
2 4
4 6
7 9
Khaûo saùt öùng duïng MATLAB trong ñieàu khieån töï ñoäng
Thöïc hieän: PHAÏM QUOÁC TRÖÔØNG - 29 - GVHD: PHAÏM QUANG HUY
C =
0 0 1 0 1 1
D =
0 0
Baøi 2: Keát noái hai haøm truyeàn noái vôùi soá lieäu nhaäp töø baøn phím (vieát chöông trình trong m_file)
%Bai tap tong quat ket noi 2 he thong noi tiep
%Cu phap SYS=series(SYS1,SYS2,OUTPUTS1,INPUTS2)
%Vi du ta se ket noi 2 ham truyen
num1=input(' Nhap num1= ');
den1=input('Nhap den1= ');
num2=input('Nhap num2= ');
den2=input('Nhap den2= ');
[num,den]=series(num1,den1,num2,den2)
Baøi 3: (Trích trang 11-14 saùch Control System Toolbox)
sys1=tf(1,[1 0])
Transfer function:
1
-
s
sys2=ss(1,2,3,4)
a =
x1
x1 1
b =
u1
x1 2

Khaûo saùt öùng duïng MATLAB trong ñieàu khieån töï ñoäng
Thöïc hieän: PHAÏM QUOÁC TRÖÔØNG - 30 - GVHD: PHAÏM QUANG HUY
c =
x1
y1 3
d =
u1
y1 4
Continuous-time model.
sys=append(sys1,10,sys2)
a =
x1 x2
x1 0 0
x2 0 1
b =
u1 u2 u3
x1 1 0 0
x2 0 0 2
c =
x1 x2
y1 1 0
y2 0 0
y3 0 3
Khaûo saùt öùng duïng MATLAB trong ñieàu khieån töï ñoäng
Thöïc hieän: PHAÏM QUOÁC TRÖÔØNG - 31 - GVHD: PHAÏM QUANG HUY
d =
u1 u2 u3
y1 0 0 0
y2 0 10 0
y3 0 0 4
Continuous-time model.
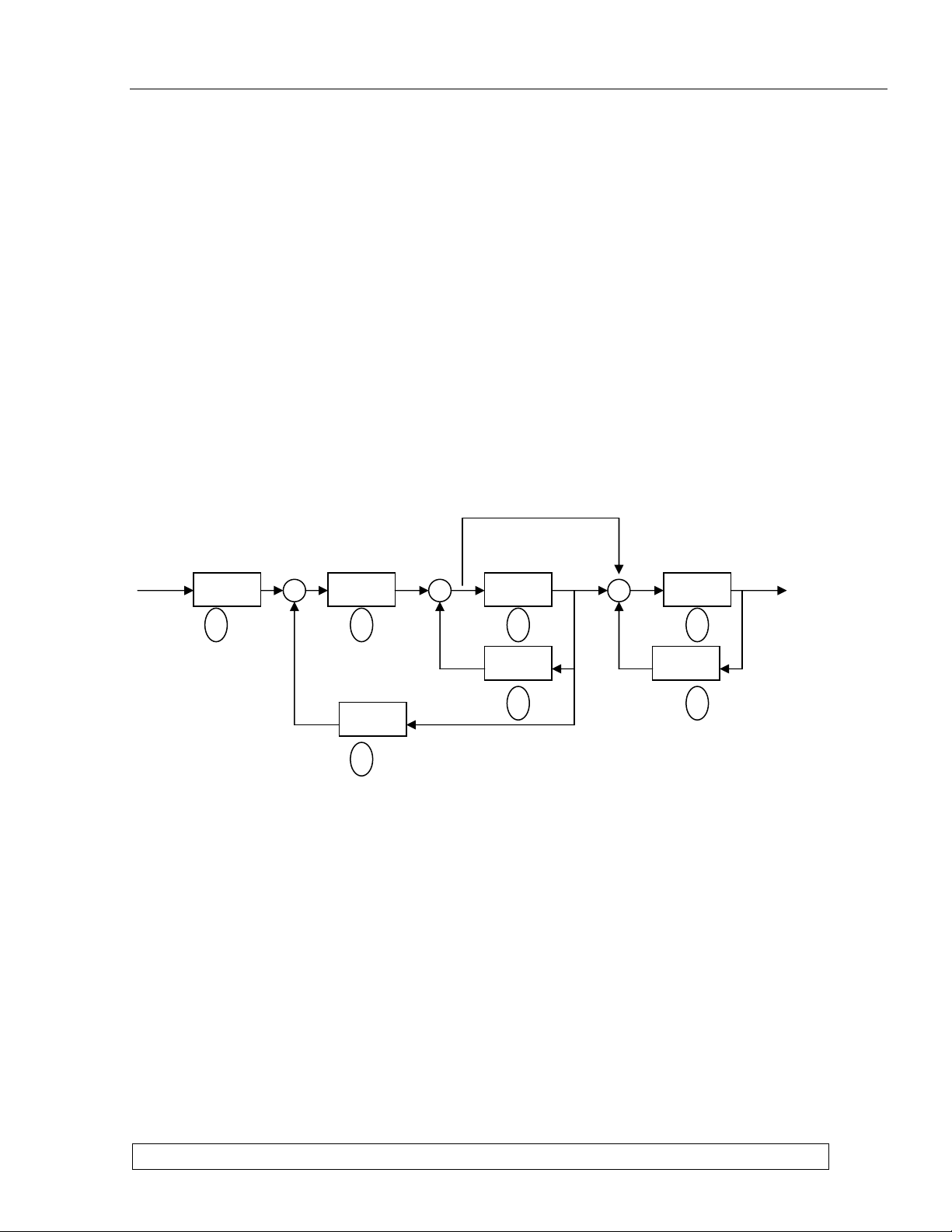
Baøi 4: moät heä thoáng bieåu dieån nhö hình sau vôùi
G0(s)=1;G1(s)=1/(s+1);G2(s)=1/(s+2);G3(s)=1/(s+3);
H1(s)=4;H2(s)=8;H3(s)=12.
Y(s)
R(s) +
G0(s) + G1(s) G2(s) + G3(s)
1 2 3 4
H2(s) H3(s)
6 7
H1(s)
5
n1=1; d1=1;
n2=1; d2=[1 1];
n3=1; d3=[1 2];
n4=1; d4=[1 3];
n5=4; d5=1;
n6=8; d6=1;
n7=12; d7=1;
nblocks=7;
blkbuild
q=[1 0 0 0 0












![Bài giảng Tin học đại cương Trường Đại học Lâm Nghiệp [Năm mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/85781779160272.jpg)
![Giáo trình Cấu trúc dữ liệu và giải thuật - TS. Đào Thị Hường [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/49281779160273.jpg)





![Câu hỏi ôn tập Đồ hoạ máy tính [năm/khóa/chương trình]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/48771779155952.jpg)





%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)