Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.1
Chương 5: MỘT SỐ PHƯƠNG PHÁP ƯỚC LƯỢNG
TỪ THÔNG ROTOR ĐCKĐB
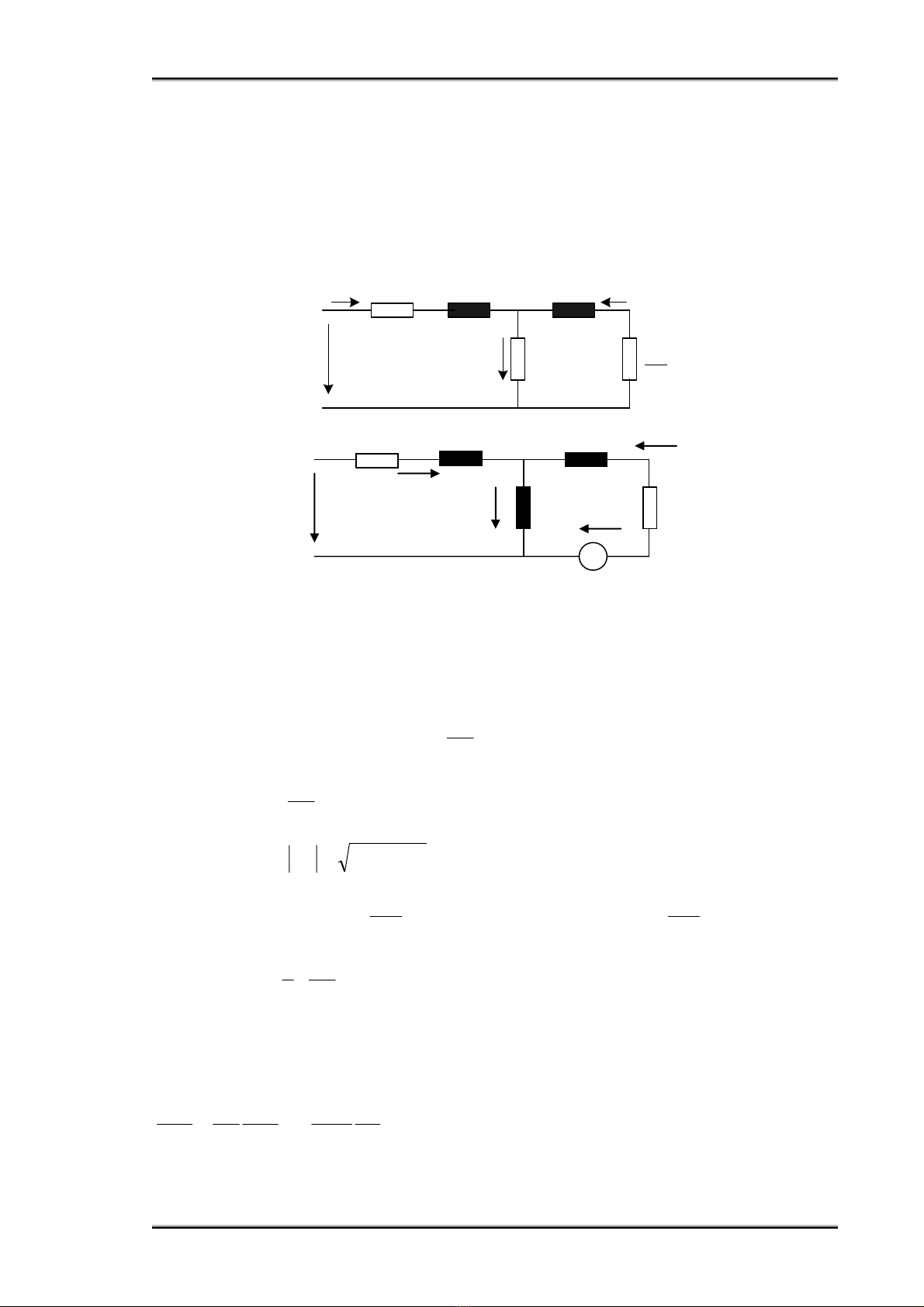
I. Ước lượng từ thông rotor từ dòng hồi tiếp và từ thông khe hở không khí
[]
()
mbar ,i,i Ψ=Ψ
m
L
s
R
r
r
L
σ
s
L
σ
s
R
s
v
s
i
r
i
m
i
s
R
s
R
σ
r
R
σ
r
R
m
L
r
j
ω
ψ
m
i
s
i
r
i
s
v
s
r
s
s
s
miii +=
smrrr iLiL +=Ψ
(
)
s
sm
s
s
s
mr
s
sm
s
rr
s
riLiiLiLiL +−=+=Ψ
()
()
s
sr
s
mm
m
r
s
smr
s
mr
s
riLiL
L
L
iLLiL
σ
−=−−=Ψ
βασ
rr
s
sr
s
m
m
r
s
rjiL
L
LΨ+Ψ=−Ψ=Ψ
2
r
2
rrr
βα
Ψ+Ψ=Ψ=Ψ
r
r
rr coscos Ψ
Ψ
==
α
φθ
r
r
rr sinsin Ψ
Ψ
==
β
φθ
()
sdrqsqrd
r
m
eii
L
L
p
2
3
TΨ−Ψ=
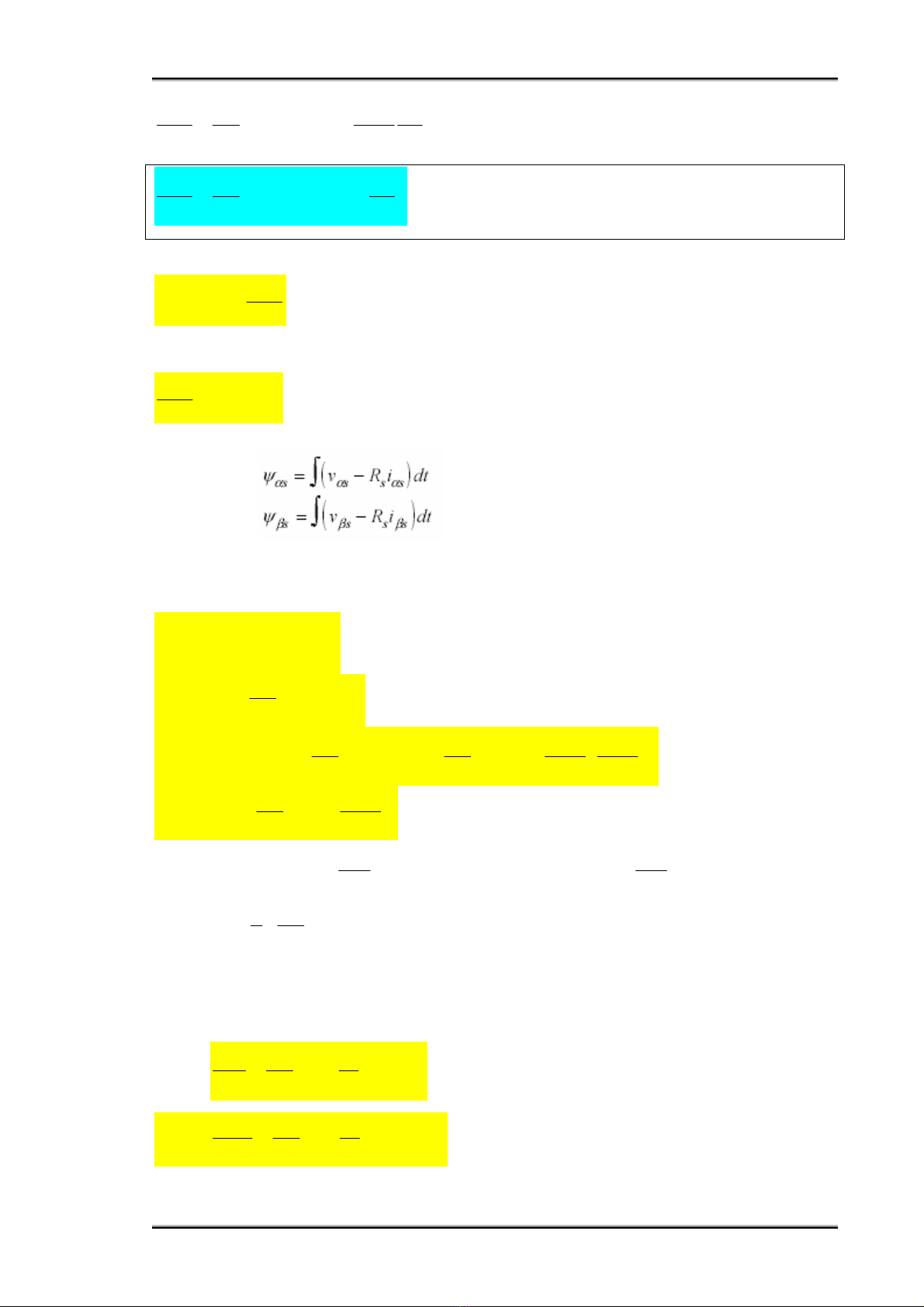
II. Ước lượng từ thông rotor từ điện áp và dòng hồi tiếp
[]
[
]
()
babar i,i,u,u=Ψ
dt
di
L
LL
dt
d
L
L
dt
ds
s
m
rs
s
s
m
r
s
r
σ
ψ
−=
Ψ
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.2
()
dt
di
L
LL
iRu
L
L
dt
ds
s
m
rs
s
ss
s
s
m
r
s
r
σ
−−=
Ψ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛−−=
Ψ
dt
di
LiRu
L
L
dt
ds
s
s
s
ss
s
s
m
r
s
r
σ
Từ thông stator được ước lượng từ dòng và áp như sau:
d
t
d
iRu
s
s
s
ss
s
s
ψ
+=
s
ss
s
s
s
siRu
d
t
d−=
ψ
Từ thông rotor được ước lượng từ từ thông stator và dòng stator:
rmsss iLiL
r
r
r+=ψ
rrsmr iLiL
r
r
r+=ψ
(
)
s
ss
s
s
m
s
riL
L
1
i
r
r
r
−=
ψ
()
s
s
m
rs
rs
2
m
s
s
m
r
s
ss
s
s
m
r
s
smr i
L
LL
LL
L
1
L
L
iL
L
L
iL
r
r
r
r
r
r
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛−−=−+=Ψ
ψψ
s
s
m
rs
s
s
m
r
s
ri
L
LL
L
L
σψ
−=Ψ
r
r
rr coscos Ψ
Ψ
==
α
φθ
r
r
rr sinsin Ψ
Ψ
==
β
φθ
()
sdrqsqrd
r
m
eii
L
L
p
2
3
TΨ−Ψ=
III. Ước lượng từ thông rotor từ tốc độ và dòng hồi tiếp
[]
()
bar i,i,
ω
=Ψ
s
r
r
s
s
r
m
s
rj
T
1
i
T
L
dt
dψ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛ω−−=
ψr
r
r
βαα
αωψ−ψ−=
ψ
rr
r
s
r
m
r
T
1
i
T
L
dt
d
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.3
αββ
βωψ+ψ−=
ψ
rr
r
s
r
m
r
T
1
i
T
L
dt
d
với
()
(
)
2
'
r
2
'
r
'
rβα Ψ+Ψ=Ψ
r
r
r
rr coscos Ψ
Ψ
==
α
φθ
r
r
rr sinsin Ψ
Ψ
==
β
φθ
()
sdrqsqrd
r
m
eii
L
L
p
2
3
TΨ−Ψ=
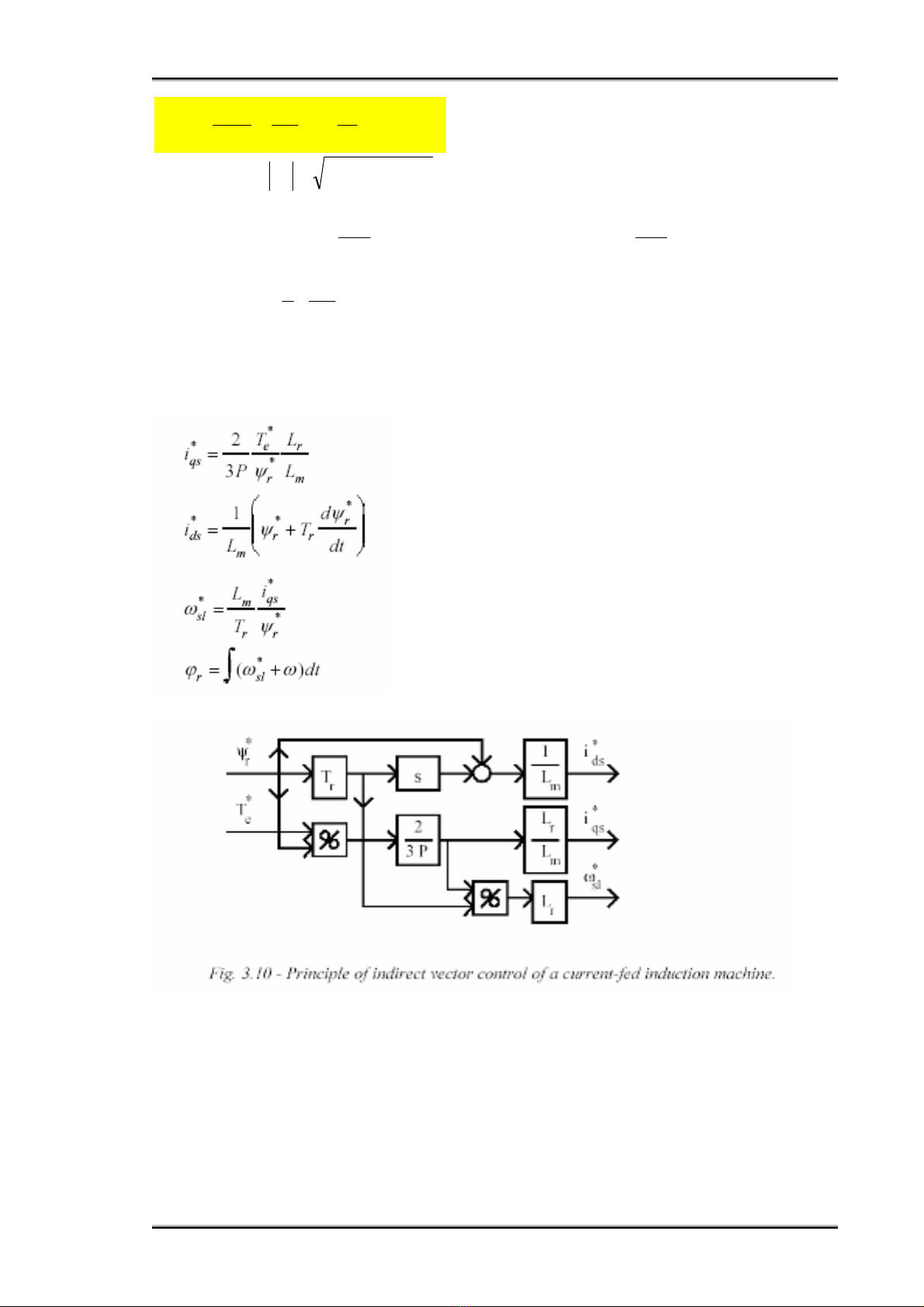
IV. Ước lượng vị trí từ thông rotor gián tiếp từ từ thông đặt và Te đặt
Các phương trình ước lượng vị trí vector từ thông rotor từ các giá trị lệnh của từ
thông rotor và moment điện từ như sau:
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.4
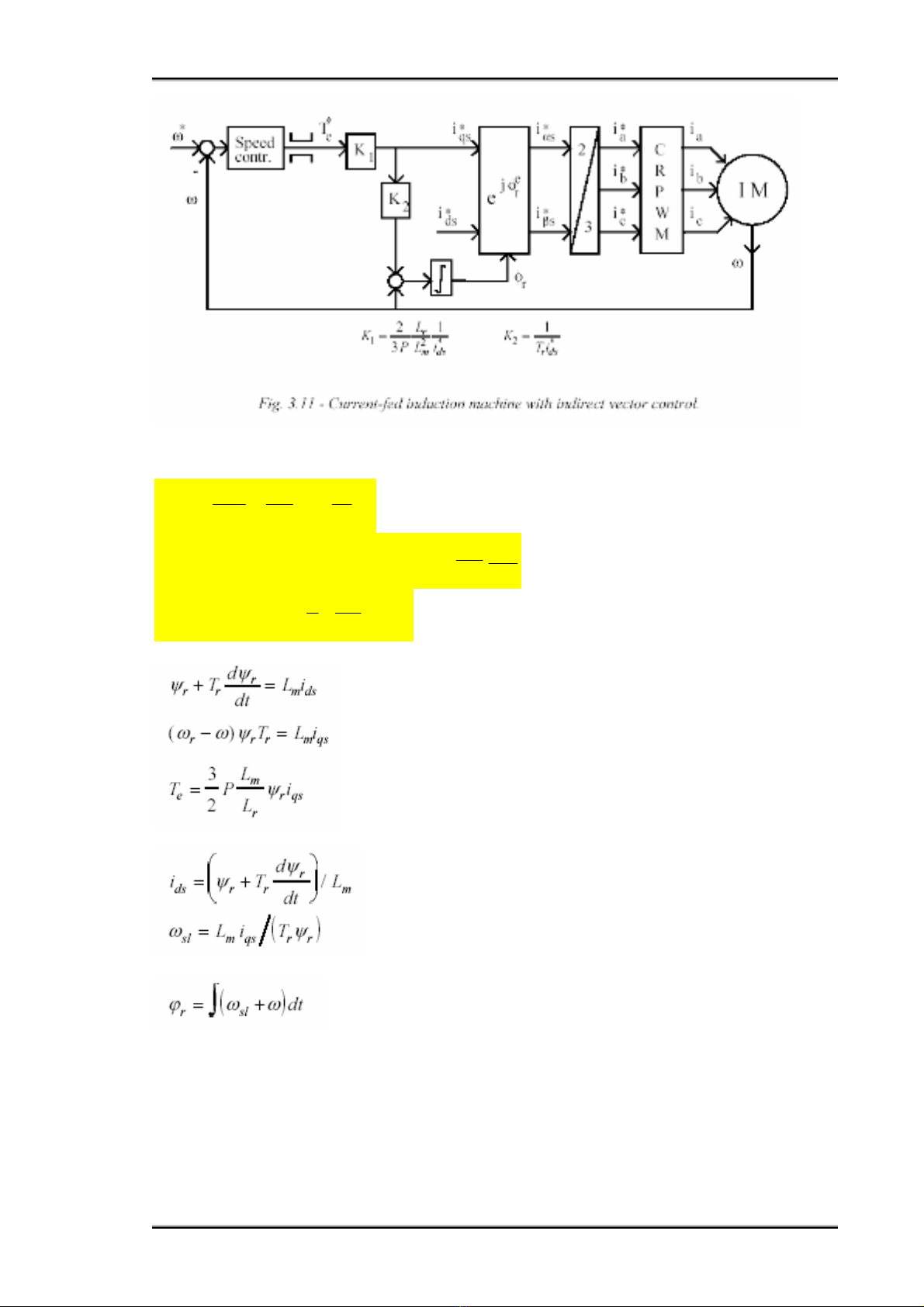
V. Ước lượng từ thông rotor từ tốc độ và dòng hồi tiếp trong HTĐ (dq)
r
r
sd
r
mr
T
1
i
T
L
dt
dΨ−=
Ψ
với tốc độ trượt: ωr = ω + ωsl = ω +
r
m
T
L
rd
sq
i
Ψ
có Te = 2
3p
r
m
L
L
sqrd iΨ
Các phương trình sau được dùng để ước lượng từ thông rotor:
Hay các phương trình này có thể được viết lại như sau:
Vị trí tức thời của vector từ thông rotor được xác định như sau:
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 5: Một số phương pháp ước lượng từ thông rotor ĐCKĐB V.5
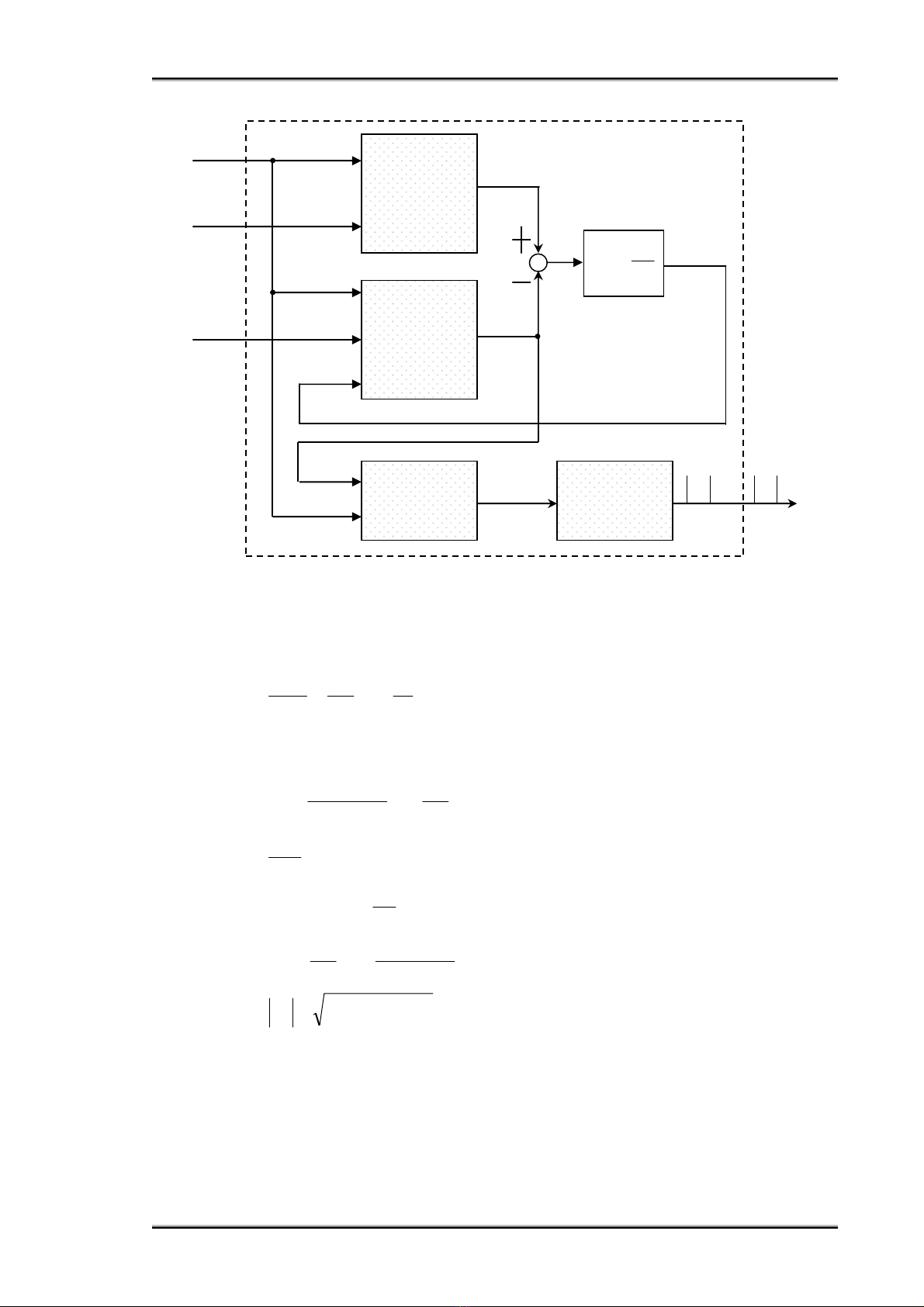
VI. Ước lượng từ thông rotor dùng khâu quan sát (observer)
Hình 5.1: Sơ đồ bộ ước lượng từ thông rotor dùng khâu quan sát.
Thuật toán ước lượng từ thông rotor cho ĐCKĐB ba pha dùng khâu quan sát
i
sd = isαcosθr + isβsinθr (5.1a)
rd
r
sd
r
m
rd
T
1
i
T
L
dt
dΨ−=
Ψ
(5.1b)
ψrα = ψrdcosθs (5.1c)
ψrβ = ψrdsinθs (5.1d)
s
r
r
m
s
s
r
2
mrs
s
sL
L
i
L
LLL
ˆΨ+
−
=ψ r
r
r (5.1e)
d
t
ds
s
ψ
r
= s
s
u
r
– Rs.s
s
i
r
+ ucomp (5.1f)
(
)
s
s
s
s
i
pcomp ˆ
s
K
Ku ψ−ψ
⎟
⎠
⎞
⎜
⎝
⎛+= rr (5.1g)
s
s
m
2
mrs
s
s
r
m
s
ri
L
LLL
L
Lr
r
r−
−ψ=Ψ (5.1h)
()
(
)
2
r
2
rr βα Ψ+Ψ=Ψ
r
(5.1i)
VII. Đáp ứng điều khiển dộng cơ bằng FOC
Đáp ứng của bộ ước lượng từ thông rotor khi các thông số ĐCKĐB ba pha có sai số:
pt (5.1a)
pt (5.1b)
pt (5.1c)
s
s
ˆ
ψ
r
s
s
i
r
ωr
pt (5.1d)
s
s
ψ
r
s
s
i
r
s
s
u
r
s
K
Ki
p+ ucomp
ucomp
pt (5.1f) s
r
ψ
r
s
s
i
r
s
s
ψ
r
pt (5.1g) s
r
ψ
r
s
s
i
r
ωr
s
s
u
r
s
r
ψ
r
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)