
16 June 2007 Assoc. Prof. Hon.-Prof. Dr.-Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
55
3. ĐK có phảnhồitrạng thái
3.1 Ôn lạicáckiếnthứccơsở
3.1.1 Mô hình trạng thái liên tụcvàcáctínhchấtcủađốItượng
Xét mô hình đãchoởmục 1.3.2c: vớinbiếntrạng thái, mbiếnvàovà
rbiếnra.
() () ()
ttt
•=+qAqBu
a) Tính điềukhiểnđược
1
,,,
n
C
QBABAB"−
⎡
⎤
=
⎣
⎦
HệMIMO nói trên sẽlà điềukhiểnđược hoàn toàn khi và chỉkhi ma trận(n, nm) sau đây:
có hạng là n. Nghĩalà, ma trậnđiềukhiểnQCphảichứanvector cộtđộclậptuyến tính. Khi
đốitượng là SISO, ma trậnđiềukhiểncókíchcỡ(n, n) và công thức:
1
,,,
n
C
QbAbAb"−
⎡
⎤
=
⎣
⎦
và nvector cộtAib(i= 0, 1, 2, …) phải là các vector độclậptuyến tính.
b) Tính quan sát được
HệMIMO nói trên sẽlà quan
sát được hoàn toàn khi và chỉ
khi ma trận(nr, n) bên có
hạng là n. Nghĩalà, ma trận
quan sát QOphảichứan
vector hàng độclậptuyếntính.
1
O
n
C
CA
Q
CA
#
−
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
Khi đốitượng là SISO, ma trận
quan sát bên vớikíchcỡ(n, n)
có hạng n và n vector hàng cTAi
(i= 0, 1, 2, …) phải là các
vector hàng độclậptuyến tính: 1
T
T
O
Tn
c
cA
Q
cA
#
−
⎡
⎤
⎢
⎥
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦

16 June 2007 Assoc. Prof. Hon.-Prof. Dr.-Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
56
()
tq
•
(
)
0
tq
(
)
tq
(
)
tx
Đốitượng ĐK
Khâu ĐC
trạng thái
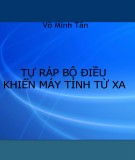
3. ĐK có phảnhồitrạng thái
3.1 Ôn lạicáckiếnthứccơsở
3.1.2 Cấutrúccơsởcủahệ ĐK trạng thái liên tục
(
)
(
)
()
[]
()
() ()
MIMO :
SISO : T
tt
tt
tt
uRq
qABRq
qAbrq
•
•
=−
=−
⎡⎤
=−
⎣⎦
a) Thiếtkếtheo phương pháp gán cực
Phương trình đặc tính của vòng ĐC khép kín có dạng:
()()
1
det
n
i
i
sssIABR
=
⎡⎤
−
−=−
⎣⎦
∏
Khi cho trướcsinhằmđạtđượcmộtđặc tính động họcnhấtđịnh, nếu so sánh hệsốhai vếcủa
phương trình trên ta sẽthu đượcmộthệcó nphương trình của(m×n) phầntửthuộcR. Đólà
hệphương trình phụcvụtổng hợp khâu ĐC. Các thiếtkếcó tên Ackermann (hệSISO), modale
(hệMIMO).

16 June 2007 Assoc. Prof. Hon.-Prof. Dr.-Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
57
3. ĐK có phảnhồitrạng thái
3.1 Ôn lạicáckiếnthứccơsở
3.1.2 Cấutrúccơsởcủahệ ĐK trạng thái liên tục
b) Thiếtkếtheo tiêu chuẩnchấtlượng
Hàm mục tiêu (hàm chấtlượng) đượcđịnh nghĩa:
() () () ()
0
TT
I
tt ttdtqQq uSu
∞
⎡
⎤
=+
⎣
⎦
∫
•Ma trậnRcầnđượcthiếtkếsao cho Iđạtđược giá trịbé nhất. Hai vector trạng thái q(t) và đầu
vào u(t) tham gia vào tiêu chuẩnchấtlượng qua hai ma trậntrọng sốQvà S. Đólàhaima trận
hằng, toàn phương và xác định dương (positive definite).
•Khi chọnt= ∞ta thu đượcRlà mộtma trậnhằng. Khi chọntlà mộtgiátrịhữuhạn, ta thu được
ma trậnR(t). Khi tìm Rsao cho Iđạtgiátrịtốithiểutasẽphảigiảiphương trình Riccati.
3.1.3 Các cấutrúcmởrộng củahệ ĐK trạng thái liên tục
a) Hệ ĐK trạng thái có khâu lọcđầuvào
()
[]
() ()
VF
tttqABRqBKw
•=− +
Sau khi đãthiếtlậpđặc tính động họccủahệthông qua thiếtkếR, có thểbổsung thêm khâu (ma
trận) lọcđầuvàoKVF để cảithiệnđặc tính tĩnh (Ví dụ: xác lậpđiểmlàmviệc, phân kênh tĩnh).

16 June 2007 Assoc. Prof. Hon.-Prof. Dr.-Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
58
()
tq
•
(
)
0
tq
(
)
tq
(
)
tx
Đốitượng ĐK
Khâu ĐC
trạng thái
Khâu lọc
đầuvào
3. ĐK có phảnhồitrạng thái
3.1 Ôn lạicáckiếnthứccơsở
3.1.3 Các cấutrúcmởrộng củahệ ĐK trạng thái liên tục
a) Hệ ĐK trạng thái có khâu lọcđầuvào(tiếp)
•Khi vector chủđạowlà hằng, sau khi quá trình quá độ –vớiđộng họcdo Rquyếtđịnh – đã qua,
vector trạng thái xác lậplàq∞, với:
()
0tq
•
=
•Vậytađặtđiềukiện: Điềukiệnđóthỏa mãn khi chọn:
xCqw
∞∞
=
=
()
1
1
VF
KCBRAB
−
−
⎡
⎤
=−
⎣
⎦

16 June 2007 Assoc. Prof. Hon.-Prof. Dr.-Ing. habil. Ng. Ph. Quang
Electrical Engineering - Automatic Control
59
()
tq
•
(
)
0
tq
(
)
tq
(
)
tx
() ()
tte
y
•
=
()
tw
y
khâu PI
3. ĐK có phảnhồitrạng thái
3.1 Ôn lạicáckiếnthứccơsở
3.1.3 Các cấutrúcmởrộng củahệ ĐK trạng thái liên tục
b) Kếthợphệ ĐK trạng thái với ĐK có hồitiếpvector biếnra
Bằng khâu lọcđầuvàoKVF ta không thểcảithiệnđược
động học, không thểkhửđược nhiễu. Có thểsửdụng
ĐC trạng thái ởvòng trong cùng, kếthợpvớihồitiếp
vector biếnravàdùngmột khâu PI (hình dưới) để khử
nhiễu, hay bù biếnđộng tham sốcủađốitượng vv…
(
)
(
)
(
)
(
)
() () ()
(
)
(
)
(
)
PI
tt tt
ttt
tt t
uRqKCqKy
qAqBu
yxCq
•
•
=− − +
=+
=− =−
Khi w= 0, z= 0ta có:
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)