
CHƯƠNG 1
GIỚITHIỆUHỆTHỐNG ĐIỀU KHIỂNSỐ
GIỚI
THIỆU
HỆ
THỐNG
ĐIỀU
KHIỂN
SỐ
1.1 Đạicương vềhệthống điều khiểnrờirạc
1.2 Hệthống điều khiểnsố
1.3 Hệthống điều khiểnrờirạc
và hệthống điều khiểnsố
1.1 ĐẠI CƯƠNG VỀ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
Hệthống điềukhiểnrờirạclàhệthống điềukhiển trong
Hệ
thống
điều
khiển
rời
rạc
là
hệ
thống
điều
khiển
trong
đó tín hiệu tại một hay nhiều điểm là một chuỗi xung.
Tùy theo phương pháp lượng tử hóa tín hiệu, ta có các loại
h
ệ
th
ố
n
g
xử l
ý
tín hi
ệ
u khác nhau.
ệg ý ệ
+ Phương pháp lượng tử hóa theo thời gian cho tín hiệu có
biê độ liê t thờii ời Hệthố ử lý l ití
biê
n
độ
liê
n
t
ục,
thời
g
i
an r
ời
rạc.
Hệ
thố
ng x
ử
lý
l
oạ
i
tí
n
hiệu này được gọi là hệ thống rời rạc.
+ Nếu phép lượng tử hóa được tiến hành theo thời gian và
cảtheo biên độ
thì kếtquảnhậnđược là tín hiệusốHệ
cả
theo
biên
độ
thì
kết
quả
nhận
được
là
tín
hiệu
số
.
Hệ
thống xử lý tín hiệu số gọi là hệ thống số.
1.1 ĐẠI CƯƠNG VỀ HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
Trong hệ thống rời rạc và hệ thống số, thông số điều khiển -
biê độ ủíhiệhỉ ấ hiệiá hờiđiể ời
biê
n
độ
c
ủ
a t
í
n
hiệ
u c
hỉ
xu
ấ
t
hiệ
n tạ
i
c
á
c t
hời
điể
m r
ời
rạc
cách đều nhau đúng bằng mộtchukỳlấymẫu tín hiệu
Vì
cách
đều
nhau
đúng
bằng
một
chu
kỳ
lấy
mẫu
tín
hiệu
.
Vì
có thời
g
ian trễ t
ấ
t
yế
u do l
ấy
mẫu
,
vi
ệ
c
ổ
n đ
ị
nh h
ệ
th
ố
n
g
g y y
,ệ ị ệ g
trở nên phức tạp hơn so với hệ liên tục, đòi hỏi các kỹ
thuật phân tích và thiết kế đặc biệt.

1.2 HỆ THỐNG ĐIỀU KHIỂN SỐ
+Đượcsửdụng để điều khiển các đốitượng ngày càng nhiều
(do sự
+
Được
sử
dụng
để
điều
khiển
các
đối
tượng
ngày
càng
nhiều
(do
sự
phát triển của kỹ thuật số, vi xử lý và máy tính).
ề ể ố ề ể
+ Có nhi
ề
u ưu đi
ể
m so với hệ th
ố
ng đi
ề
u khi
ể
n liên tục:
9Linh hoạt
9Thay đổi thuật toán điều khiển dễ dàng
9Dễ dàng áp dụng các thuật toán điều khiển phức tạp
+ Hiện nay các hệ thống điều khiển số được sử dụng rất rộng rãi: từ các
bộ điều khiểnđơngiản(điều khiển nhiệtđộ điều khiểnđộng cơDC
bộ
điều
khiển
đơn
giản
(điều
khiển
nhiệt
độ
,
điều
khiển
động
cơ
DC
,
AC,...) đến các hệ thống điều khiển phức tạp (robot, máy bay, tàu vũ
tátì h ô hệhó h )
t
rụ, qu
á
t
r
ì
n
h
c
ô
ng ng
hệ
hó
a
h
ọc,…
)
1.3 HỆ THỐNG ĐIỀU KHIỂN RỜI RẠC
&HỆTHỐNG ĐIỀU KHIỂNSỐ
&
HỆ
THỐNG
ĐIỀU
KHIỂN
SỐ
¾
Thệthốó02l ití hiệ
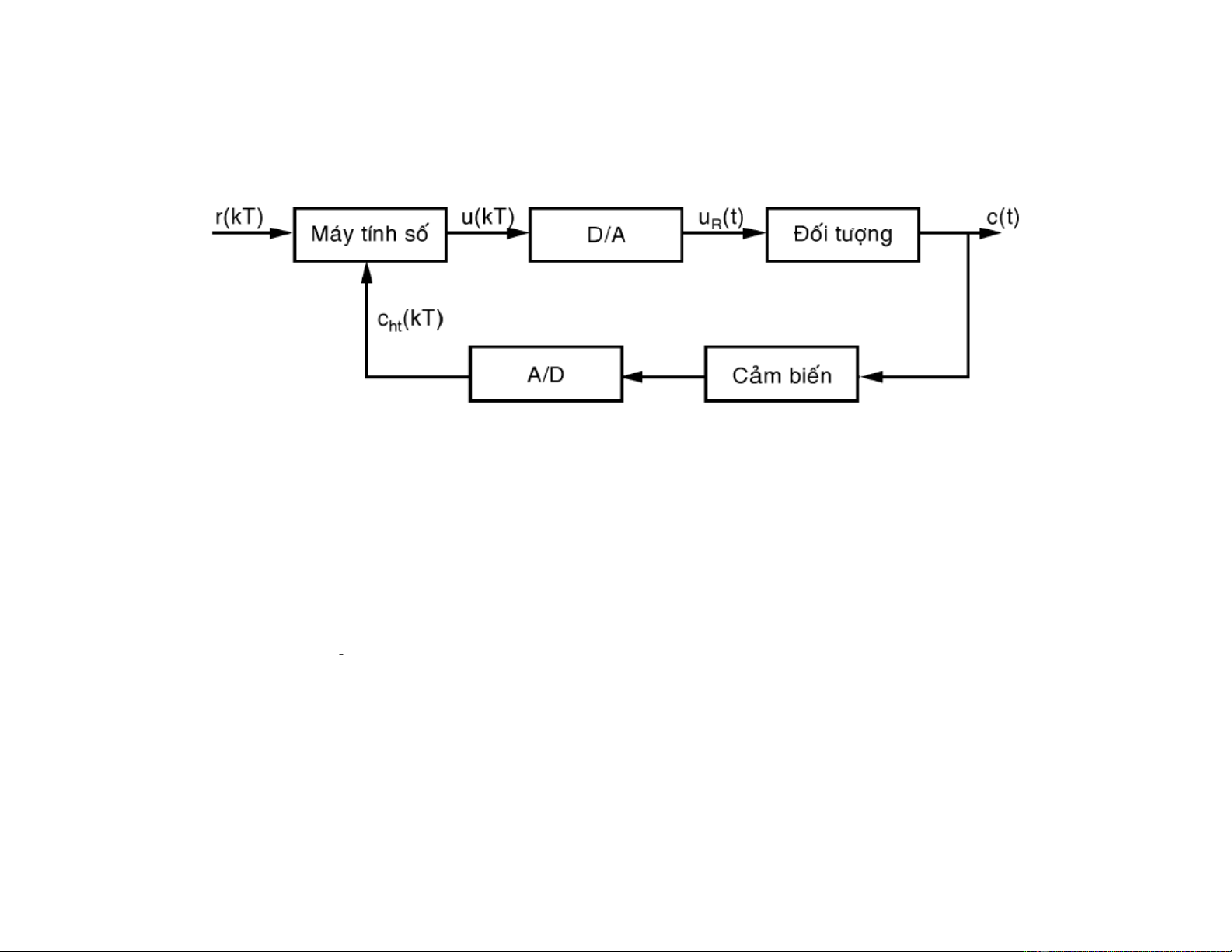
Hệ thống điều khiển số thường gặp
¾
T
rong
hệ
thố
ng c
ó
02
l
oạ
i
tí
n
hiệ
u:
+ Tín hiệu liên tục: c(t), uR(t)
ố
+ Tín hiệu s
ố
: r(kT), cht(kT), u(kT).
¾Trung tâm của hệ là máy tính số: xử lý thông tin, phản hồi từ cảm
biến và xuất ra tín hiệu điều khiển.
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)