Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 6: Các phương pháp điều khiển dòng VI.1
Chương 6: CÁC PHƯƠNG PHÁP ĐIỀU KHIỂN DÒNG
I. Điều khiển dòng trong hệ qui chiếu stator
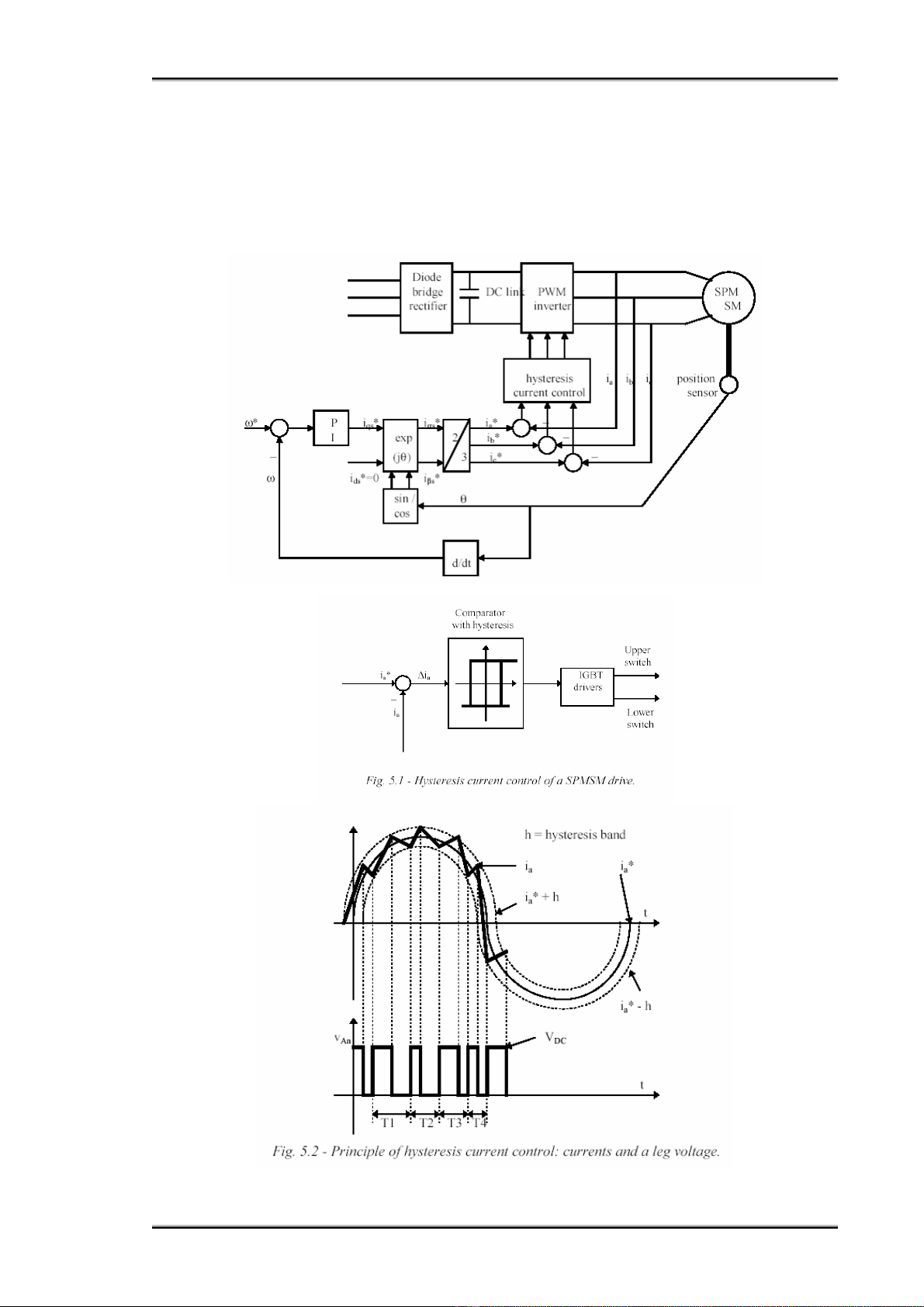
I.1. Điều khiển vòng trễ dòng điện
Điều khiển dòng, tiếp dòng
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 6: Các phương pháp điều khiển dòng VI.2
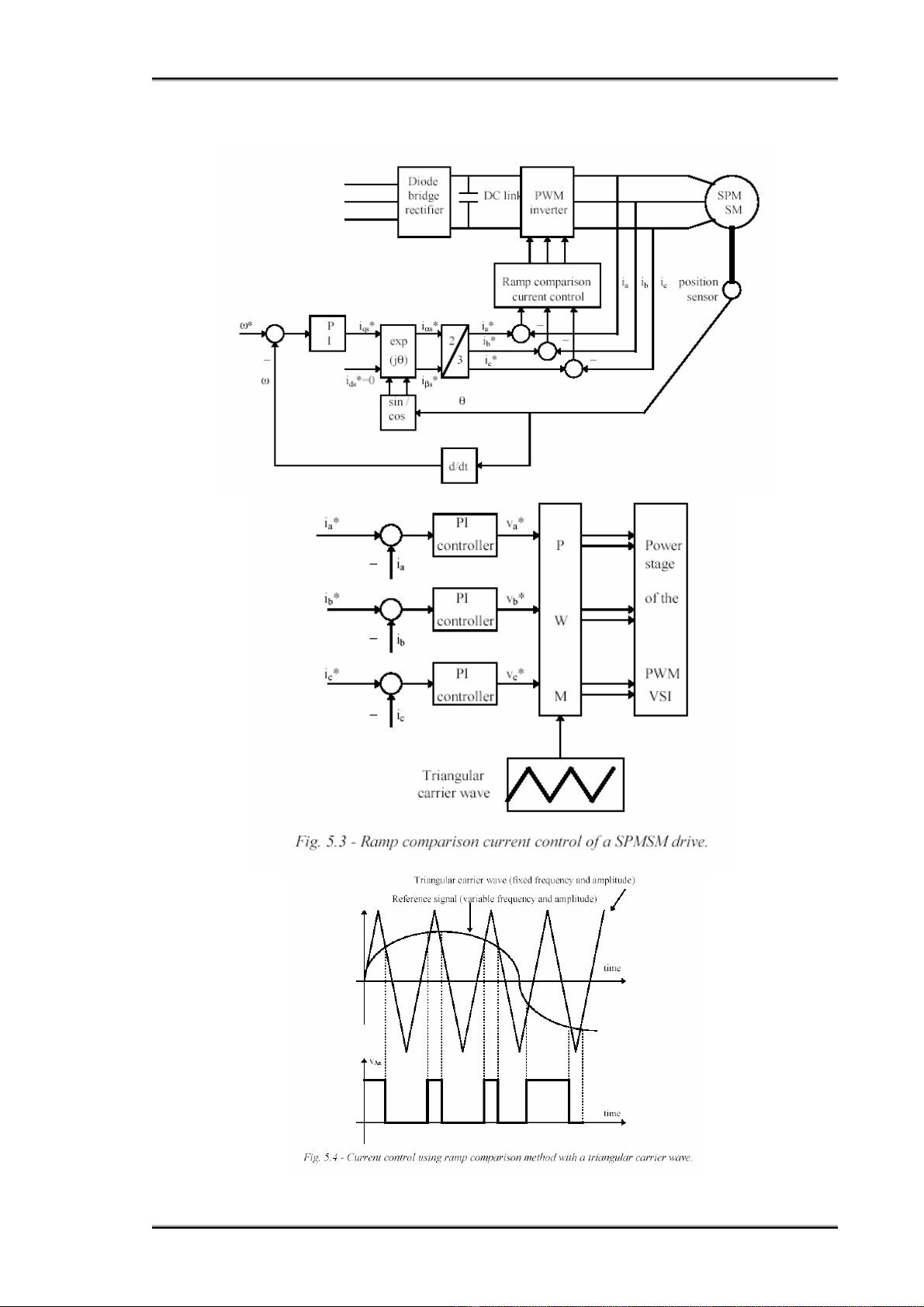
I.1. Điều khiển so sánh dòng điện
Điều khiển dòng, tiếp áp
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 6: Các phương pháp điều khiển dòng VI.3
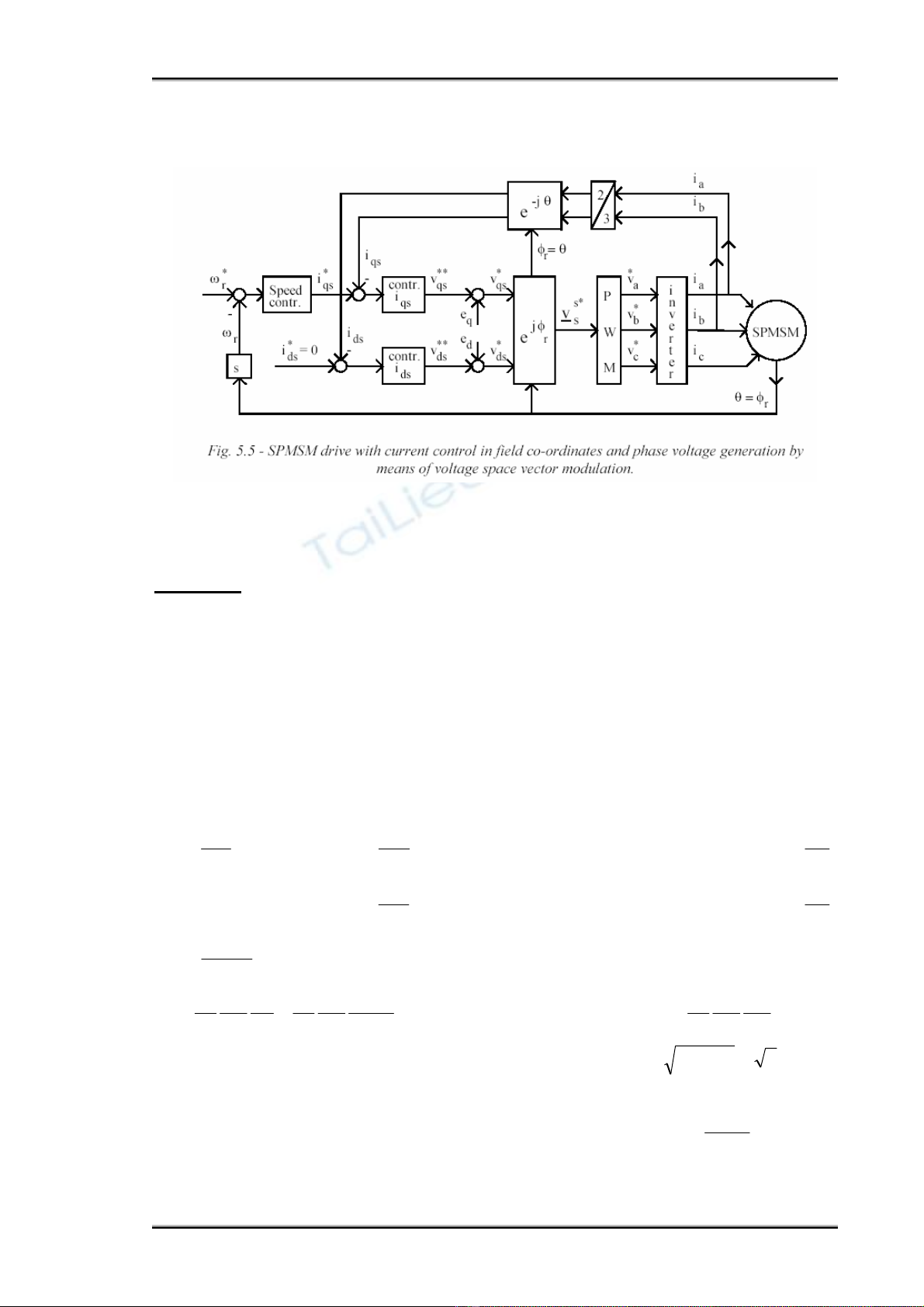
II. Điều khiển dòng trong hệ qui chiếu từ thông rotor
Điều khiển dòng (dq), tiếp áp
III. Điều khiển áp
Điều khiển điện áp vòng hở
Phân biệt: Điều khiển tiếp áp
Điều khiển tiếp dòng
Bộ nghịch lưu áp
Bộ nghịch lưu dòng
Điều khiển dòng trong hệ toạ độ stator (abc)
Điều khiển dòng trong hệ toạ độ từ thông rotor (dq)
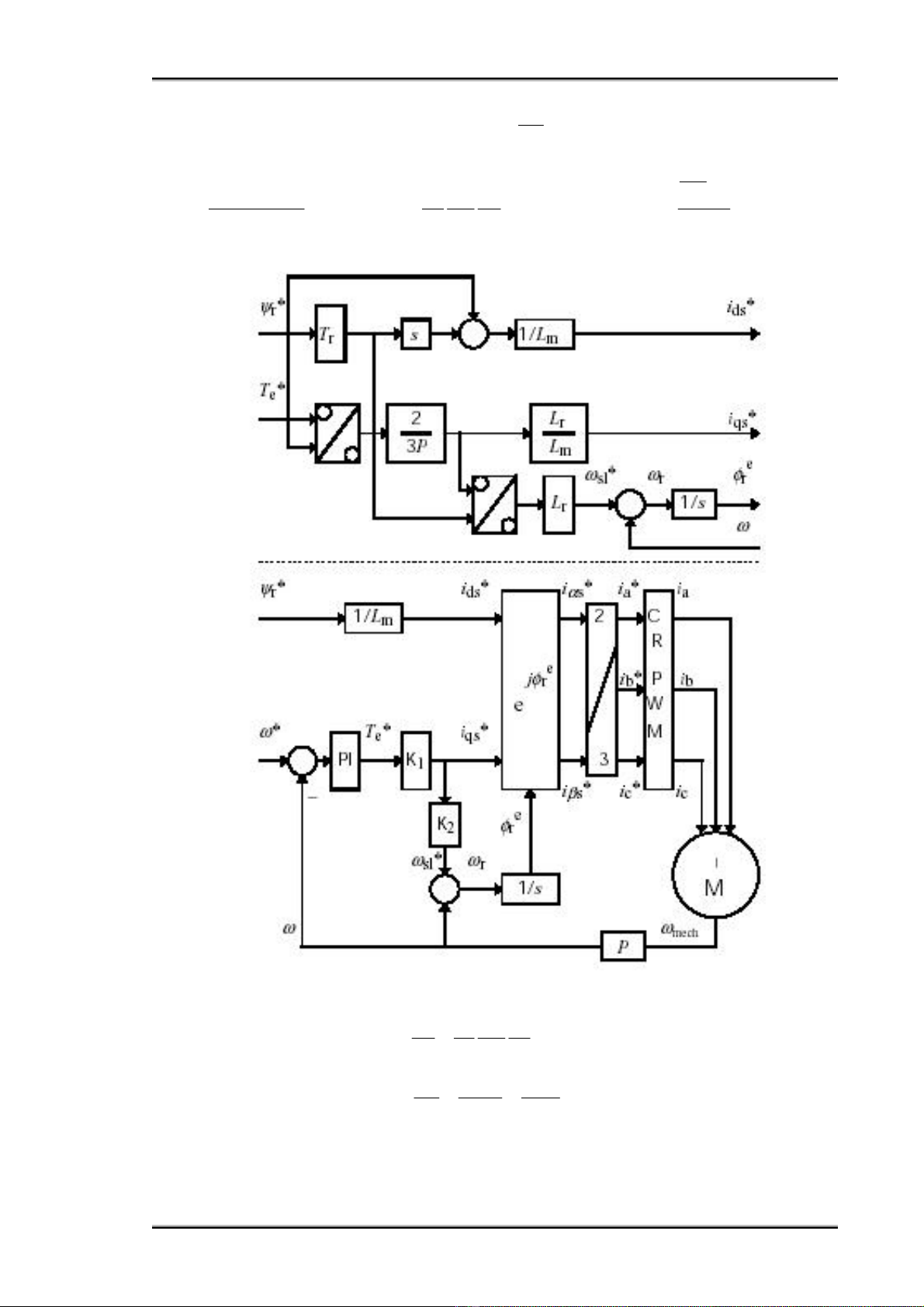
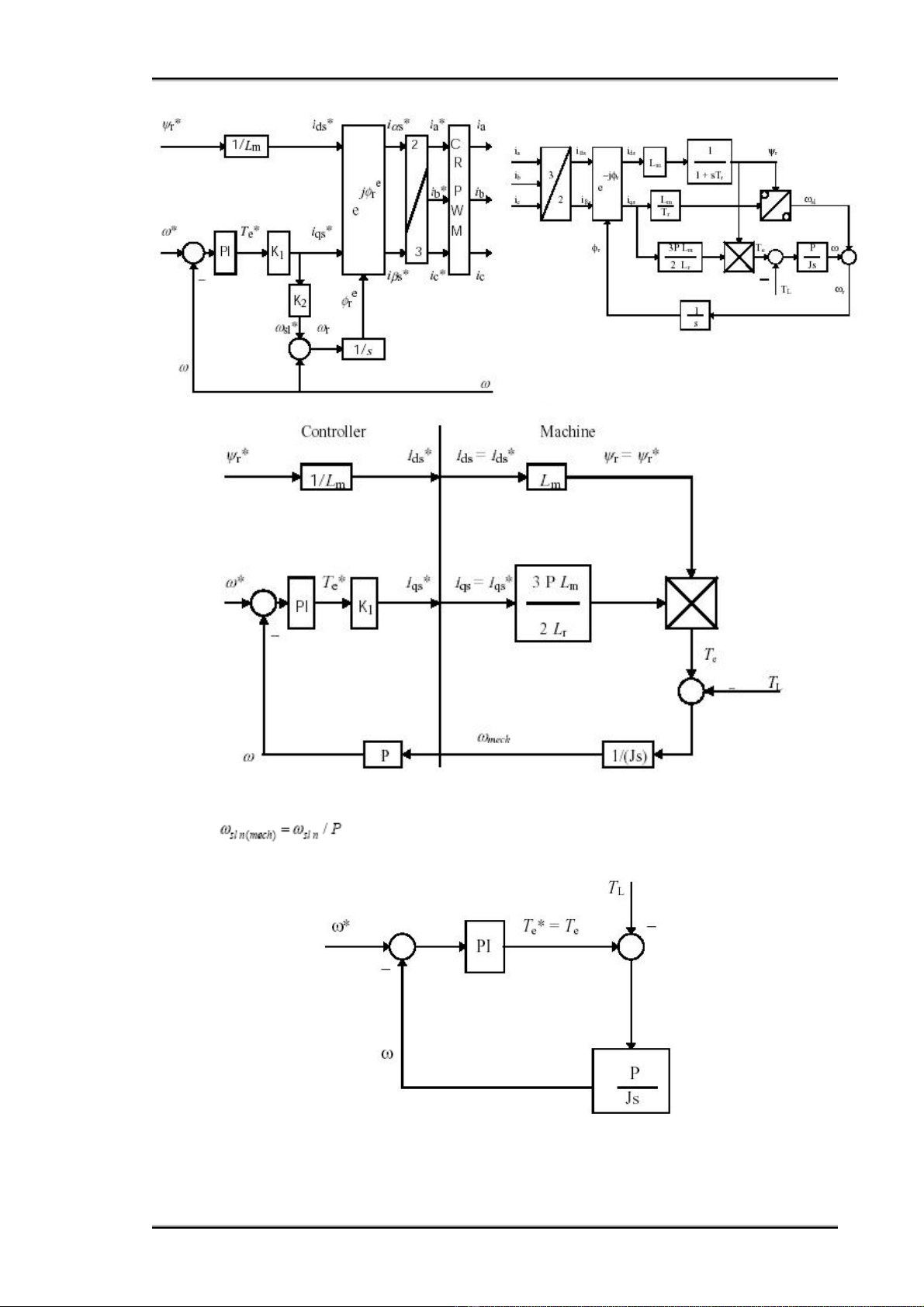
IV. Tính toán thiết kế hệ thống điều khiển gián tiếp ĐCKĐB theo phương
pháp định hướng từ thông rotor
f2
X
Lm
m
π
= f2
X
Ls
s
π
σ
σ
= sms LLL
σ
+=
r
s
sR
L
T=
f2
X
Lr
r
π
σ
σ
= rmr LLL
σ
+=
r
r
rR
L
T=
sT1
iL
r
sdm
rd +
=
ψ
Từ thông không đổi, ⇒ dsmr iL=Ψ
dsm
e
r
m
r
e
r
m
sq iL
T
L
L
p2
3
T
L
L
p2
3
i==
ψ
⇒
m
e
r
m
dssq L
T
L
L
p2
3
ii =
Mà s
2
ds
2
sqs I2iii =+=
Khi biết momen điện Te và dòng điện Is,
Từ 2 phương trình trên tính được isd và isq và Ψr. Và tính được
rr
qsm
sl T
iL
Ψ
=
ω
.
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 6: Các phương pháp điều khiển dòng VI.4
Từ đó tính được tốc độ góc trựơt cơ: p
sl
co_sl
ω
ω
= và tính được tốc độ động cơ.
m
rrdrd
sd L
sT
i
ψ
ψ
+
=
r
e
r
m
sq
T
L
L
p2
3
i
ψ
= r
rr
qs
r
m
sl L
T
i
L
L
Ψ
=
ω
Từ thông không đổi: *
dsm
*
riL=Ψ
*
e1
*
qs TKi = ⇒ *
ds
2
m
r
*
qs
*
e
1i
1
L
L
p3
2
i
T
K==
*
qs2
*
sl iK=
ω
⇒ *
dsr
m
*
rr
m
*
qs
*
sl
2iT
L
T
L
i
K=
Ψ
==
ω
vì *
sl
*
rr
*
qsm TiL
ω
Ψ=
Bài giảng Hệ Thống Điều Khiển Số (ĐCKĐB) T©B
Chöông 6: Các phương pháp điều khiển dòng VI.5
Chú ý:
























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)