Chương 4: Phương trình động học robot
48
Chƣơng 4
PHƢƠNG TRÌNH ĐỘNG HỌC ROBOT
4.1. Dẫn nhập
Bất kỳ một Robot nào cũng bao gồm các khâu liên kết với nhau thông qua
các khớp. Hai chuyển động cơ bản của các khâu thông qua khớp quay và khớp
tịnh tiến.
Hình 4.1. Khớp quay và khớp tịnh tiến trong chuyển động của robot.
Ta đặt trên mỗi khâu của một Robot một hệ trục toạ độ. Sử dụng các phép
biến đổi thuần nhất có thể mô tả vị trí tương đối và hướng giữa các hệ toạ độ
này.
Theo Denavit, mối liên hệ giữa hai khâu liền kề nhau (khâu n so với khâu
(n-1)) được mô tả bởi ma trận A là ma trận biến đổi thuần nhất gồm có các phép
quay và tịnh tiến giữa các hệ toạ độ với nhau.
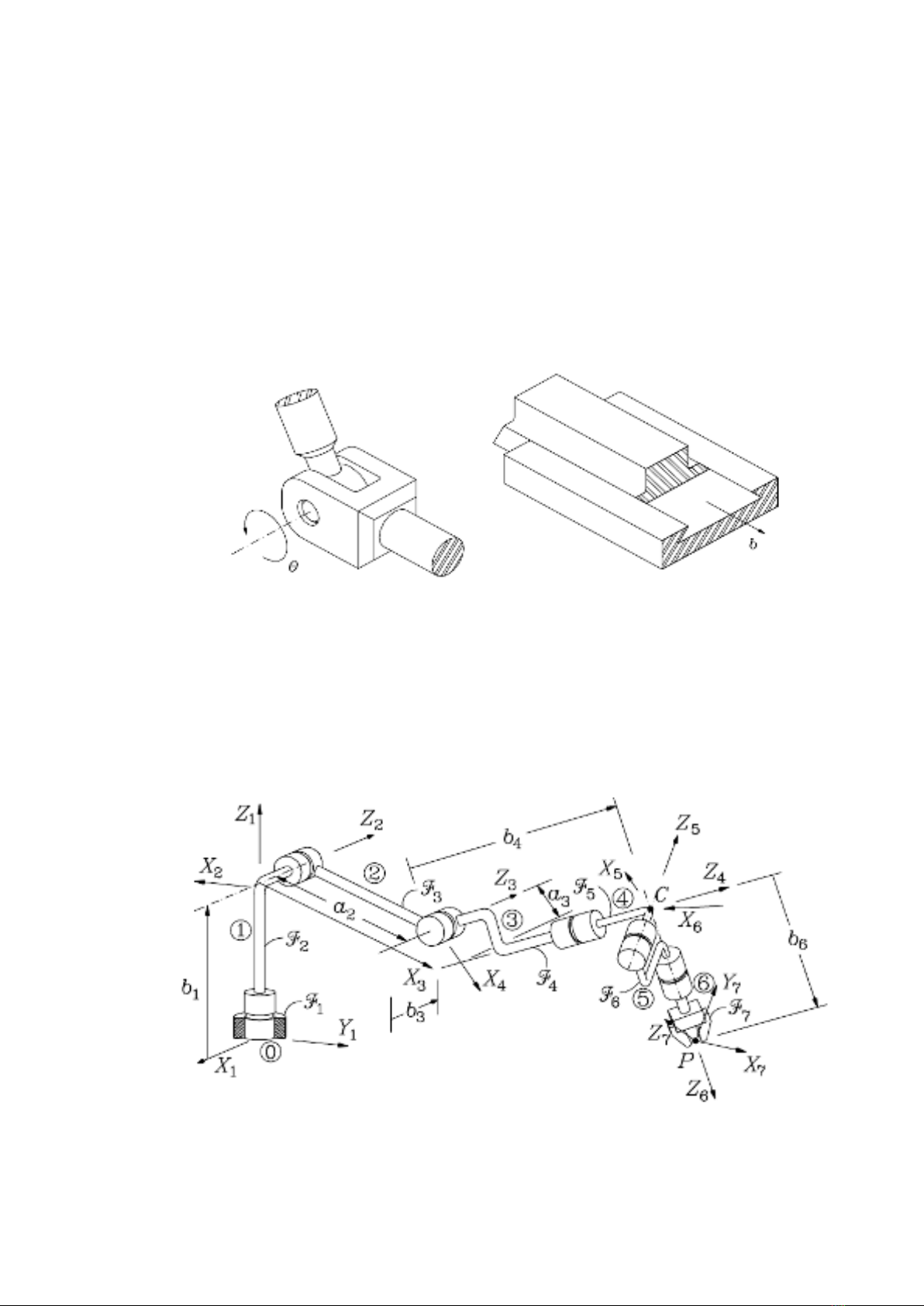
Hình 4.2. Đặt hệ trục toạ độ cho các khâu của robot Puma.
Vậy, A1 là ma trận mô tả hướng và vị trí của hệ toạ độ gắn trên khâu thứ
nhất so với hệ toạ độ gốc.
Chương 4: Phương trình động học robot
49
Tương tự cho A2 , là ma trận mô tả mối quan hệ về hướng và vị trí của hệ
toạ độ thứ hai so với hệ toạ độ gắn trên khâu thứ nhất.
Tích của các ma trận A là ma trận T (Theo Denavit).
Ví dụ : T3= A1.A2.A3
Hình 4.3. Các vector định vị và định hướng của tay máy.
Lưu ý :
+ Nếu một Robot có 6 khâu thì :
T6=A1A2A3 A4A5A6.
T6 được gọi là ma trận vector cuối , mô tả hướng và vị trí của hệ toạ độ gắn
lên khâu chấp hành cuối so với hệ toạ độ gốc.
+ Nếu một Robot có số bậc tự do w>3 thì 3 bậc tự do đầu tiên dùng để định vị,
các bậc tự do còn lại để định hướng.
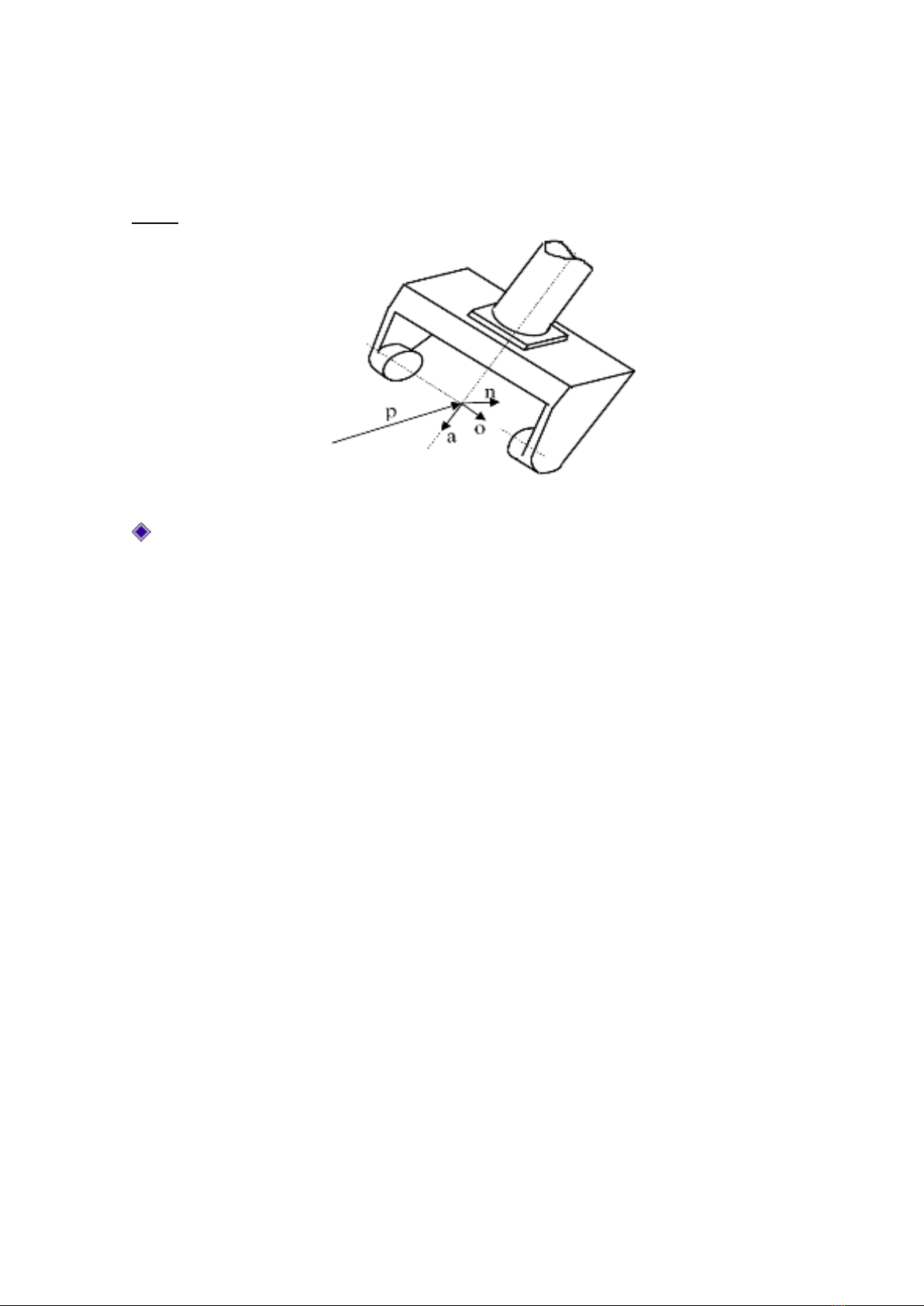
+ Hệ toạ độ biểu diễn khâu chấp hành cuối (điểm tác động cuối)
aon
:
3 vector chỉ phương của hệ toạ độ gán trên khâu chấp hành cuối, (điểm tác
động cuối) xác định bởi :
a
: Vector có hướng mà theo đó bàn tay sẽ tiếp cận đến đối tượng.
o
: Vector có hướng theo đó các ngón tay cầm nắm hay thả đối tượng.
n
: Vector pháp tuyến của
o
và
a
:
aon .
1000
6
zzzz
yyyy
xxxx
paon
paon
paon
T
4.2. Bộ thông số Denavit-Hartenberg (DH)
4.2.1. Các khái niệm :
Chương 4: Phương trình động học robot
50
Một Robot gồm nhiều khâu cấu thành từ những khâu nối tiếp nhau thông
qua các khớp động.
Gốc chuẩn của 1 Robot là là khâu số 0 và không tính vào số các khâu. Khâu
1 nối với khâu chuẩn bởi khớp 1, không có khớp ở đầu mút khâu cuối cùng
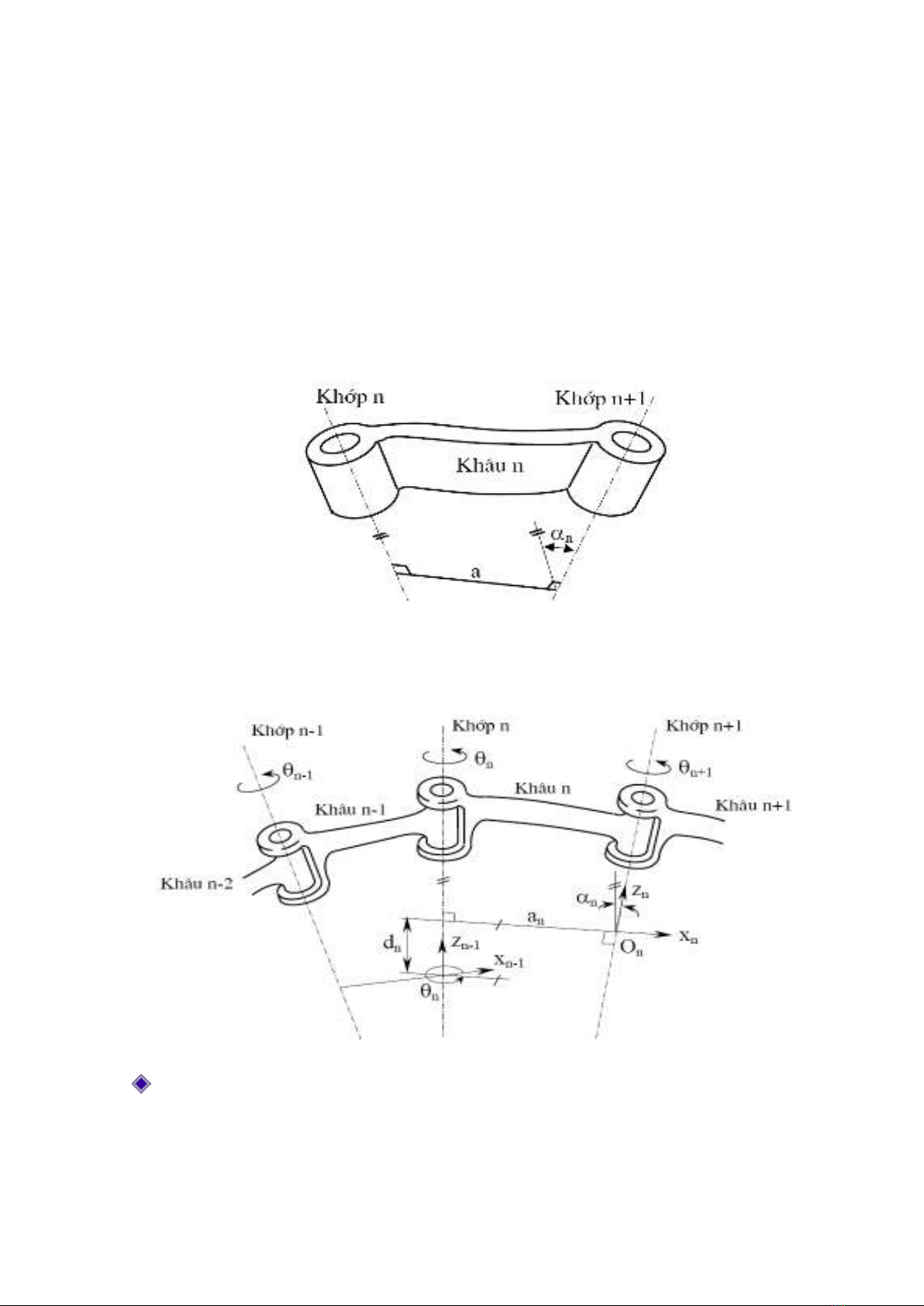
4.2.2. Độ dài pháp tuyến chung và góc giữa hai trục khớp :
Bất kỳ một khâu nào cũng được đặc trưng bởi hai yếu tố :
+ Độ dài pháp tuyến chung an
+ Góc giữa các trục khớp đo trong mặt phẳng vuuong góc với an , ký hiệu là
n
Hình 4.4. Chiều dài góc xoắn của khâu.
n
:Góc xoắn của khâu n( Khớp n so với khớp (n+1))
an : Chiều dài của khâu n ( Khớp n so với khớp (n+1))
Hình 4.5. Các thông số của khâu : an, αn, dn, θn
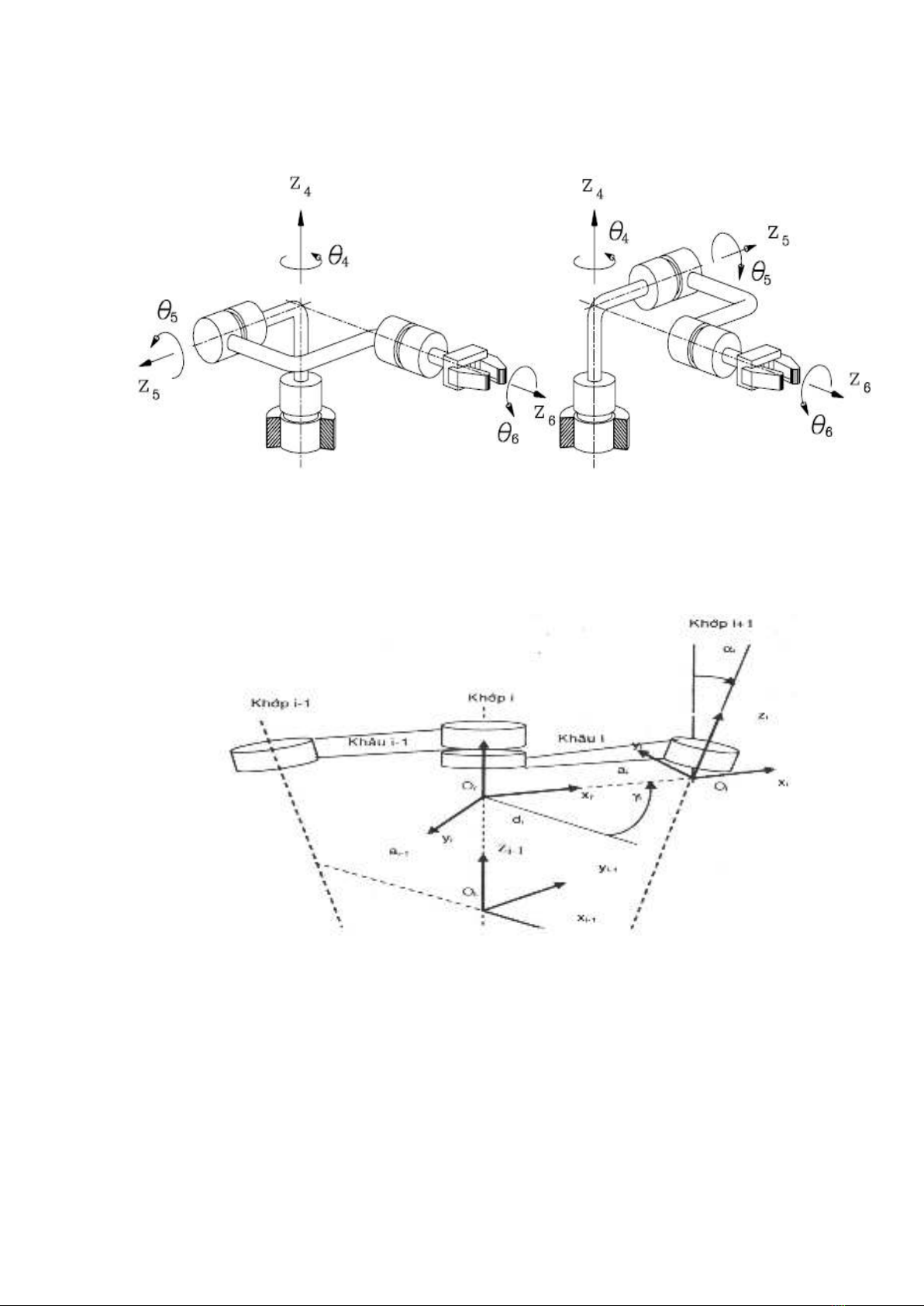
Các trường hợp đặc biệt :
+
n
=0,an =const(2 trục khớp song song)
+ /
n
/=90, an =const (2 trục khớp vuông góc)
+
n
=0(180), an =0 (2 trục khớp trùng nhau )
Chương 4: Phương trình động học robot
51
+ /
n
/=90, an =0 (2 trục khớp cắt nhau và vuông góc nhau)
Hình 4.6. Các trường hợp đặc biệt của phương hai trục khớp
4.2.3. Khoảng cách giữa hai khâu và góc quay giữa hai khâu.
Tiếp tục khảo sát mối quan hệ giữa các khâu liền kề nhau, phổ biến là hai
khâu liên kết nhau ở chính trục của khớp :
Hình 4.7. Khoảng cách hai khâu và góc quay giữa hai khâu.
Mỗi trục khớp có hai đường pháp tuyến chung đói với nó, khoảng cách
giữa hai đường pháp tuyến chung đo dọc theo trục khớp n gọi là dn
dn còn gọi là khoảng cách giữa hai khâu : Khâu n so với khâu thứ (n-1)
Góc giữa hai đường pháp tuyến chung đo trong mặt phẳng vuông góc với
trục khớp thứ n là góc θn.
θn là góc quay của khâu thứ n so với khâu thứ (n-1)
4.2.4. Bộ thông số Denavit-Hertenberg :
Chương 4: Phương trình động học robot
52
Cả 4 thông số xác định ở trên chính là bộ thông số DH :
n
, an, dn, θn
Với 4 thông số trên , ta có thể xác định vị trí và hướng của mỗi khâu so với
nhau và so với toạ độ góc
Nếu khớp nối hai khâu là khớp quay thì θn là biến khớp ( 3 thông số còn lại
là hằng số)
Nếu khớp nối là tịnh tiến thì dn là biến khớp :( θn =0, an =0,
n
=const)
4.3. Gắn hệ toạ độ cho Robot .
Để khảo sát động học của Robot ta phải gắn trên mỗi khâu của robot một
hệ toạ độ. Nguyên tắc chung để gắn hệ toạ độ như sau :
a. Gốc của hệ toạ độ :
Gốc toạ độ của khâu thứ n nằm trên đường tâm của trục khớp thứ (n+1) và
nằm tại giao điểm của đường pháp tuyến chung an với trục khớp thứ (n+1)
(Tổng quát, chéo nhau)
Nếu hai trục khớp cắt nhau thì gốc toạ độ on nằm tại chính điểm cắt đó.
Nếu hai trục khớp song song nhau thì on nằm trên trục khớp thứ n+1 và tại
một một vị trí đặc biệt nào đó để quá trình tính toán là thuận lợi nhất.
b. Chọn trục Zn :
Trục Zn nằm dọc theo trục khớp thứ n+1 và có hướng về phía các khâu.
c. Chọn trục Xn :
Trục Xn nằm dọc theo đường pháp tuyến chung hướng từ trục khớp thứ n
đến trục khớp thứ n+1.
Nếu hai trục khớp cắt nhau thì
1
.
nnn zzx
d. Chọn trục yn theo qui tắc bàn tay phải.
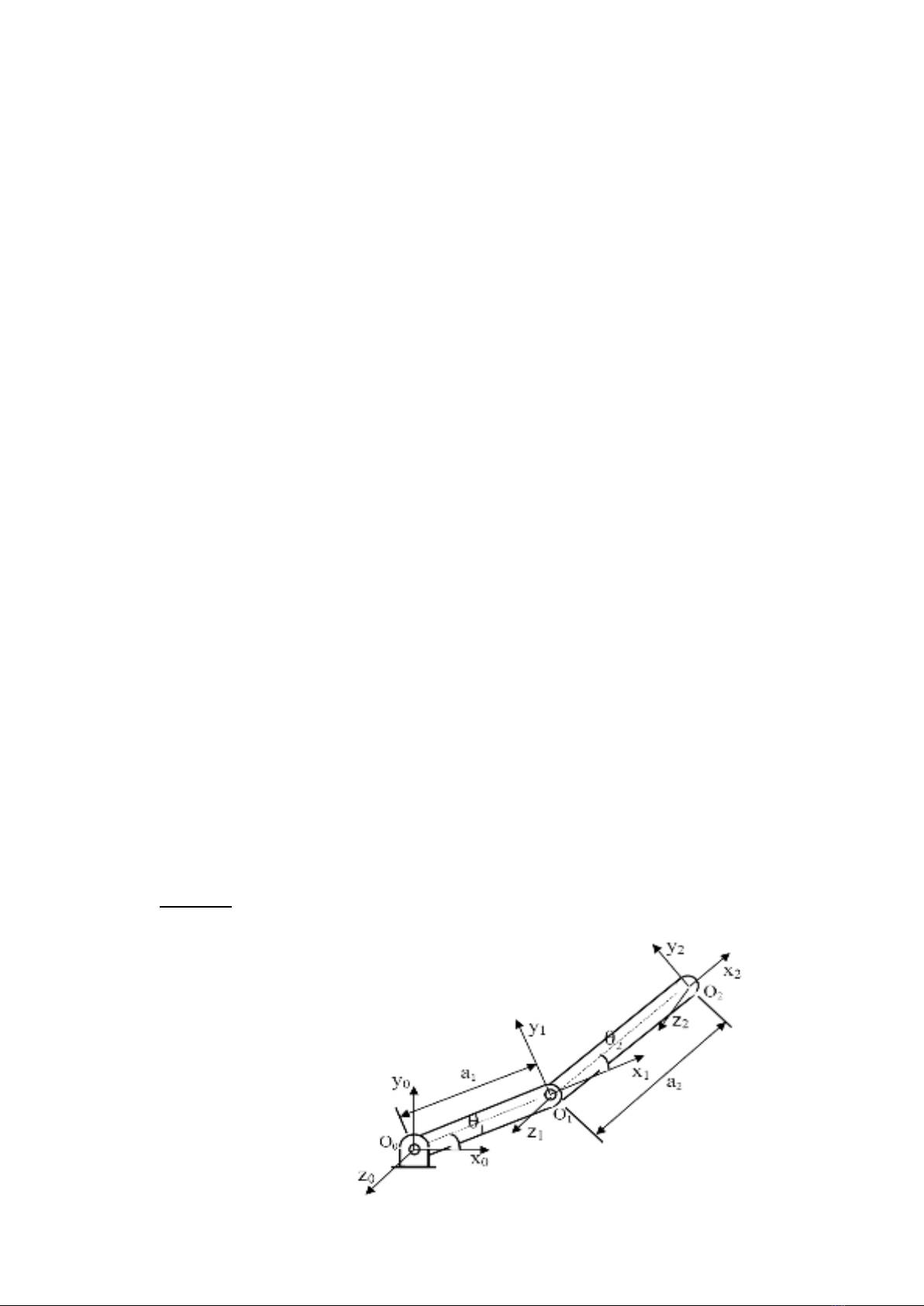
Ví dụ 1: Gắn hệ toạ độ và xác định các thông số DH cho Robot có hai khâu
phẳng :







![Bài giảng Kỹ thuật robot [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/vijiraiya/135x160/366_bai-giang-ky-thuat-robot.jpg)
















![Giáo trình CAD và ứng dụng (Phần thực hành): [Hướng dẫn chi tiết]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260305/hoatulip2026/135x160/80431773135924.jpg)

%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)