5
CHƯƠNG 1
TỔNG QUAN
1.1. Đặt vấn ñề
1.2. Tổng quan về ñộng cơ không ñồng bộ ba pha
1.2.1. Giới thiệu
1.2.2. Cấu tạo
1.2.3. Nguyên lý hoạt ñộng
1.3. Các phương trình cơ bản của ĐCKĐB
1.4. Các phương pháp ñiều khiển tốc ñộ ñộng cơ KĐB
1.4.1. Điều khiển vô hướng ĐCKĐB (scalar)
1.4.2. Phương pháp ñịnh hướng trường(FOC)
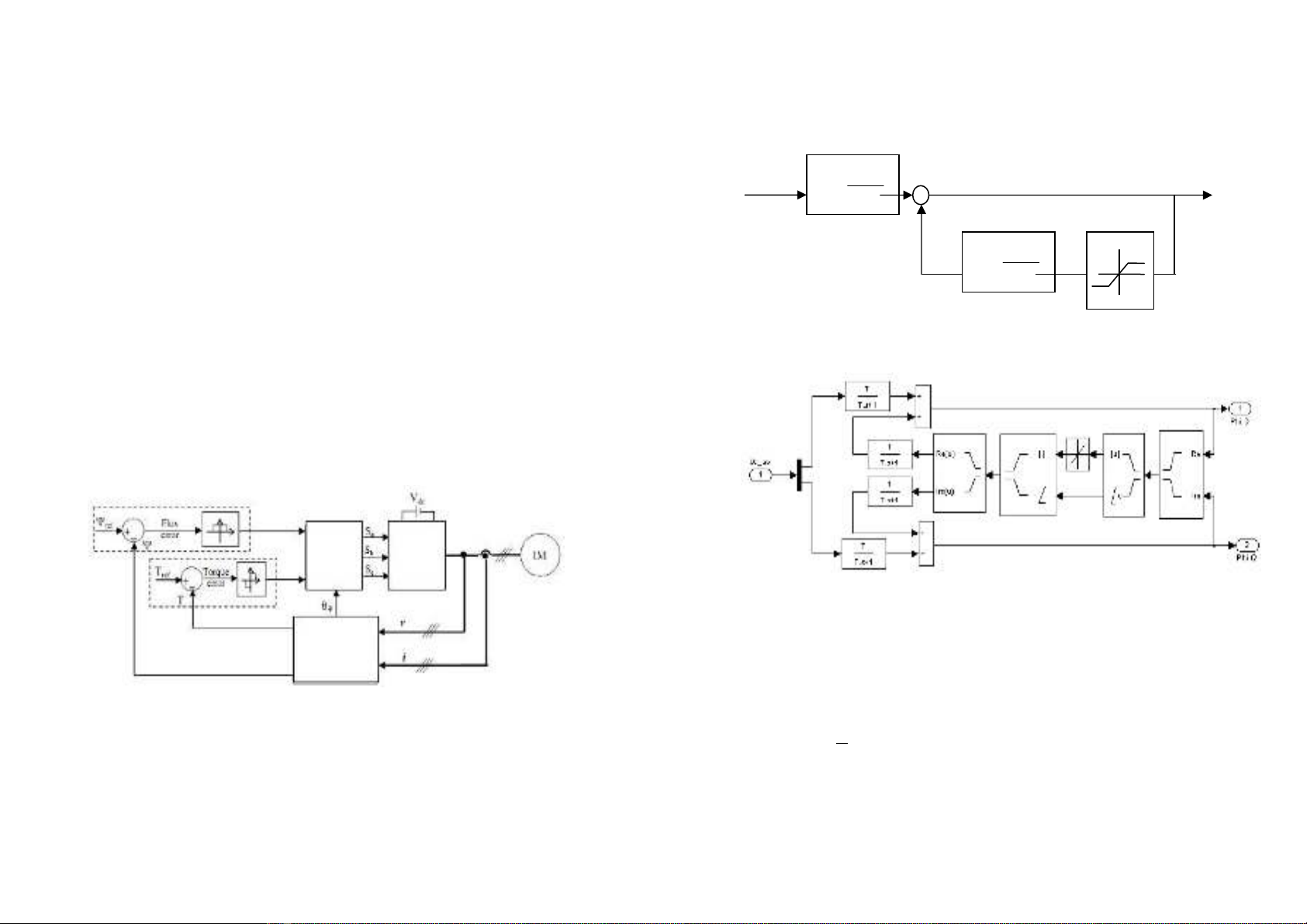
1.4.3. Phương pháp ñiều khiển trực tiếp moment (DTC)
+ Ưu ñiểm của phương pháp DTC so với phương pháp FOC:
o Ít phụ thuộc vào thông số ñộng cơ.
o Không cần phải sử dụng các khối chuyển ñổi tương quan.
o Cho ñáp ứng momen nhanh hơn.
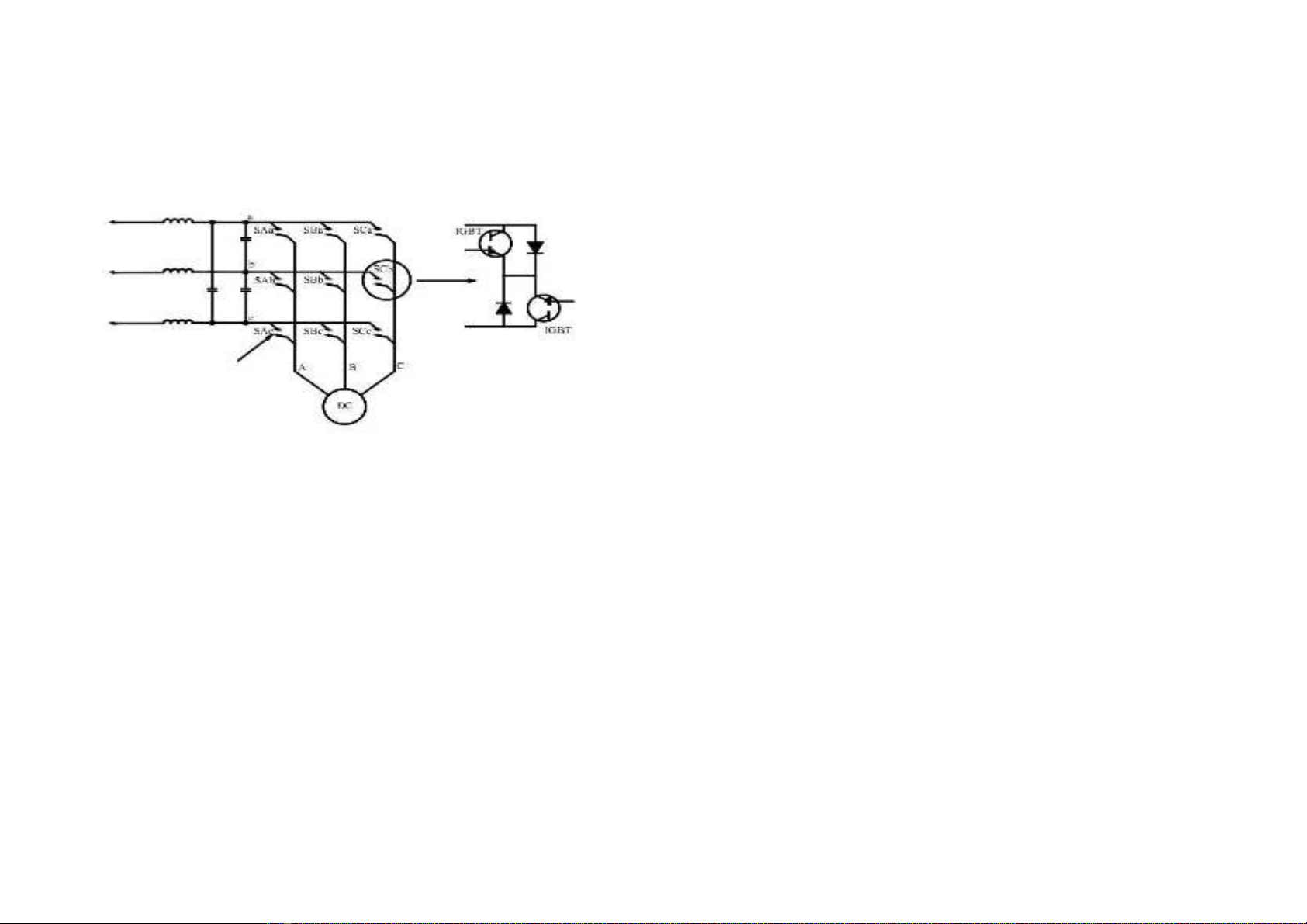
1.4.4. Giới thiệu bộ biến tần ma trận
Việc sử dụng biến tần ma trận có nhiều ưu ñiểm như:
o Biến tần ma trận có khả năng chuyển ñổi ñiện áp xoay chiều
có tần số và biên ñộ cố ñịnh ở ngõ vào thành ñiện áp xoay chiều có
tần số và biên ñộ thay ñổi.
o Cho phép tải hoạt ñộng trong cả 4 góc phần tư mặt phẳng V-
A của tải (four-quadrant operation).
o Không cần sử dụng nhiều tụ ñiện như trong bộ biến ñổi DC-
link.
o Ngăn chặn ñặc tính nguồn ngõ vào và làm tăng mật ñộ công
suất ở ngõ ra.
o Tạo ra luồng công suất hai chiều bất chấp số pha của ngõ vào
6
và ngõ ra, cho phép nâng cao hiệu suất hoạt ñộng lên nhiều lần so với
các bộ ñiều khiển AC thông thường.
o Bằng cách sử dụng các phương pháp ñiều biên thích hợp,
biến tần ma trận có thể tạo nhiều dạng sóng ngõ ra bất chấp các loại
tải và nguồn ngõ vào.
o Giảm khối lượng ñáng kể so với các bộ biến ñổi ña tầng.
o Tuổi thọ cao.
1.5. Những kỹ thuật ñiều khiển tiên tiến hiện nay
1.6. Kết luận chương 1
Hiện nay, các phương pháp trên ñã ñược ứng dụng rộng rãi
trong lĩnh vực ñiều khiển truyền ñộng ñộng cơ KĐB. Tuy nhiên, bên
cạnh những ưu ñiểm, các phương pháp vẫn tồn tại những khuyết
ñiểm:
- Điều khiển vô hướng chỉ dùng cho truyền ñộng ñặc tính thấp.
- Điều khiển DTC: tần số ñóng ngắt linh kiện thay ñổi khi
không sử dụng các giải thuật nâng cao, yêu cầu tốc ñộ tính toán và
tần số lấy mẫu cao, xảy ra hiện tượng ñập mạch do momen có sự dao
ñộng khi ñiều khiển ở tốc ñộ thấp.
- Điều khiển tựa theo từ thông vẫn gặp một số hạn chế: nhạy
với sự thay ñổi thông số của ñộng cơ như hằng số thời gian rotor và
ño lường từ thông không chính xác tại tốc ñộ thấp. Do ñó, hiệu suất
giảm và bộ ñiều khiển phổ biến như PID thì không thể duy trì yêu
cầu ñiều khiển dưới những ñiều kiện thay ñổi.
Do ñó, ñể khắc phục những nhược ñiểm trên, việc kết hợp ñiều
khiển trí tuệ nhân tạo với kỹ thuật ñiều khiển kinh ñiển ñã ra ñời góp
phần không nhỏ trong việc phát triển lĩnh vực ñiều khiển truyền ñộng
ñiện xoay chiều 3 pha.