Mạch khống chế nhiệt độ
3.5. Hoạt động của bộ định thời (timer)
a. Giới thiệu.
Một định nghĩa đơn giản của timer là một chuỗi các flip-flop chia đôi tần số nối
tiếp với nhau, chúng nhận tín hiệu vào làm nguồn xung nhịp. Ngõ ra của tần số cuối
làm nguồn xung nhịp cho flip-flop báo tràn của timer (flip-flop cờ). Giá trị nhị phân
trong các flip-flop của timer có thể xem như số đếm số xung nhịp (hoặc các sự kiện) từ
khi khởi động timer. Ví dụ timer 16 bit sẽ đếm lên từ 0000H đến FFFFH. Cờ báo tràn
sẽ lên 1 khi số đếm tràn từ FFFFH đến 0000H.
8051/8031 có 2 timer 16 bit, mỗi timer có bốn cách làm việc. Người ta sử dụng các
timer để : a) định khoảng thời gian, b) đếm sự kiện hoặc c) tạo tốc độ baud cho port
nối tiếp trong 8051/8031.
Trong các ứng dụng định khoảng thời gian, người ta lập trình timer ở một
khoảng đều đặn và đặt cờ tràn timer. Cờ được dùng để đồng bộ hóa chương trình để
thực hiện một tác động như kiểm tra trạng thái của các cửa ngõ vào hoặc gửi các sự
kiện ra các ngõ ra. Các ứng dụng khác có thể sử dụng việc tạo xung nhịp đều đặn của
timer để đo thời gian trôi qua giữa hai sự kiện (ví dụ : đo độ rộng xung).
Đếm sự kiện dùng để xác định số lần xẩy ra của một sự kiện. Một “sự kiện” là
bất cứ tác động ngoài nào có thể cung cấp một chuyển trạng thái trên một chân của
8051/8031. Các timer cũng có thể cung cấp xung nhịp tốc độ baud cho port nối tiếp
trong 8051/8031.Truy xuất timer của 8051/8031 dùng 6 thanh ghi chức năng đặc biệt
cho trong bảng sau:
SFR MỤC ĐÍCH ĐỊA CHỈ Địa chỉ hóa từng bit
TCON
TMOD
TL0
TL1
TH0
TH1
Điều khiển timer
Chế độ timer
Byte thấp của timer 0
Byte thấp của timer 1
Byte cao của timer 0
Byte cao của timer 1
88H
89H
8AH
8BH
8CH
8DH
Có
Không
Không
Không
Không
Không
Bảng 5: Thanh ghi chức năng đặc biệt dùng timer.
b. Thanh ghi chế độ timer (TMOD)
Thanh ghi TMOD chứa hai nhóm 4 bit dùng để đặt chế độ làm việc cho timer 0 và
timer 1.
Mạch khống chế nhiệt độ
Bit Tên Timer Mô tả
7 GATE 1 Bit (Mở) cổng, khi lên 1 timer chỉ chạy khi INT1 ở
mức cao.
6 C/T 1 Bit chọn chế độ counter/timer
1=bộ đếm sự kiện
0=bộ định khoảng thời gian
5 M1 1 Bit 1 của chế độ (mode)
4 M0 1 Bit 0 của chế độ
00: chế độ 0 : timer 13 bit
01: chế độ 1 : timer 16 bit
10: chế độ 2 : tự động nạp lại 8255A bit
11: chế độ 3 : tách timer
3 GATE 0 Bit (mở) cổng
2 C/T 0 Bit chọn counter/timer
1 M1 0 Bit 1 của chế độ
0 M0 0 Bit 0 của chế độ
Bảng 6: Tóm tắt thanh ghi TMOD
c. Thanh ghi điều khiển timer (TCON)
Thanh ghi TCON chứa các bit trạng thái và các bit điều khiển cho timer 0 và timer 1.
Bit Ký hiệu Địa chỉ Mô tả
TCON.7 TF1 8FH Cờ báo tràn timer 1. Đặt bởi phần cứng khi tràn,
được xóa bởi phần mềm hoặc phần cứng khi bộ xử
lý chỉ đến chương trình phục vụ ngắt.
TCON.6 TR1 8EH Bit điều khiển timer 1 chạy. Đặt/xóabằng phần mềm
cho timer chạy/ngưng.
TCON.5 TF0 8DH Cờ báo tràn timer 0
TCON.4 TR0 8CH Bit điều khiển timer 0 chạy
TCON.3 IE1 8BH Cờ cạnh ngắt 1 bên ngoài, đặc bởi
TCON.2 IT1 8AH Cờ kiểu ngắt một bên ngoài.phần cứng khi phát hiện
một cạnh xuống ở INT1, xóa bằng phần mềm hoặc
phần cứng khi CPU chỉ đến chương trình phục vụ
ngắt.Đặt/xóa bằng phần mềm đề ngắt ngoài tích
cực cạnh xuống/mức thấp
TCON.1 IE0 89H Cờ cạnh ngắt 0 bên ngoài
TCON.0 IT0 88H Cờ kiểu ngắt 0 bên ngoài
Bảng 7: Tóm tắt thanh ghi TCON
Mạch khống chế nhiệt độ
d. Các chế độ timer.
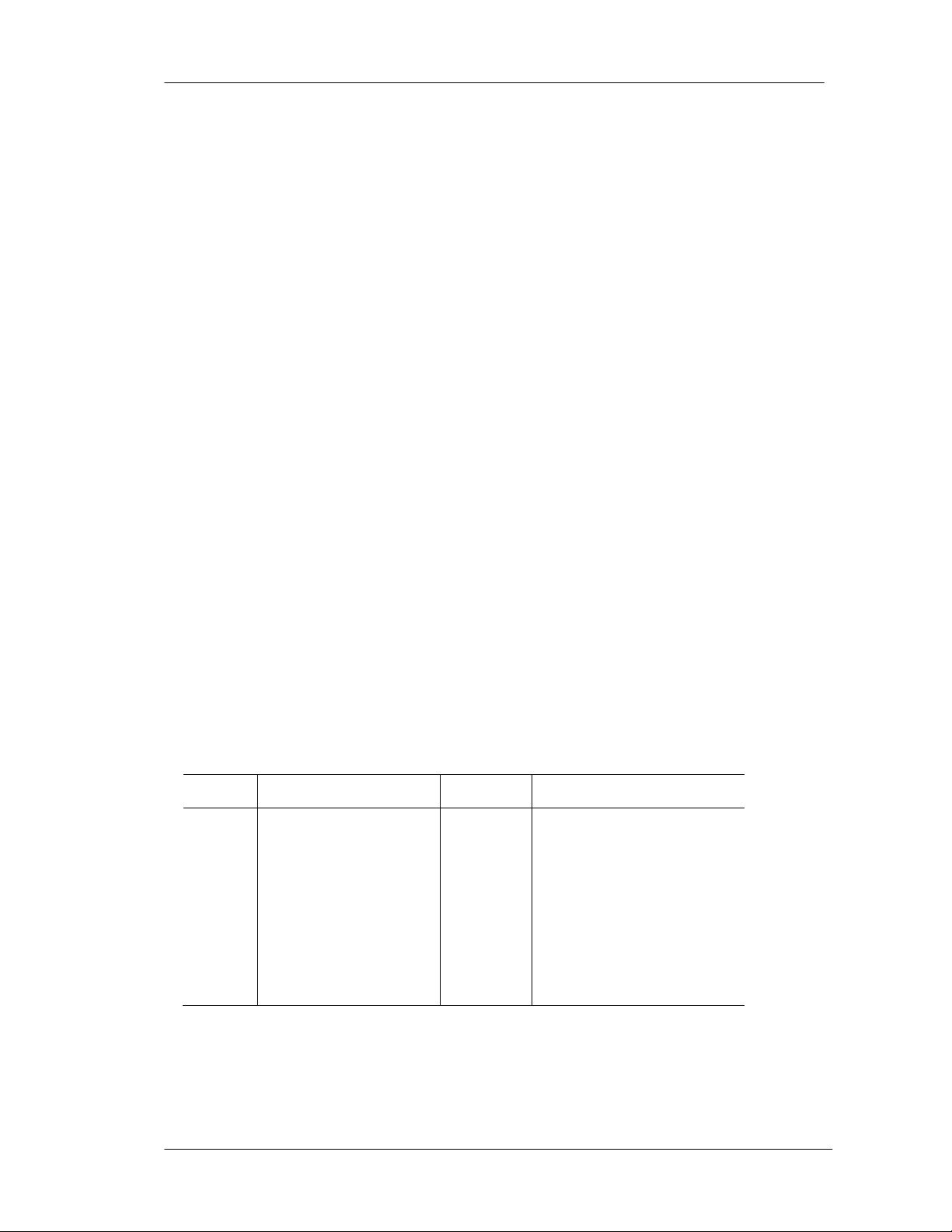
• Chế độ 0, chế độ timer 13 bit.
Để tương thích với 8048 (có trứớc 8051)
Ba bit cao của TLX (TL0 và/hoặc TL1) không dùng
Xung nhịp Cờ báo tràn
timer
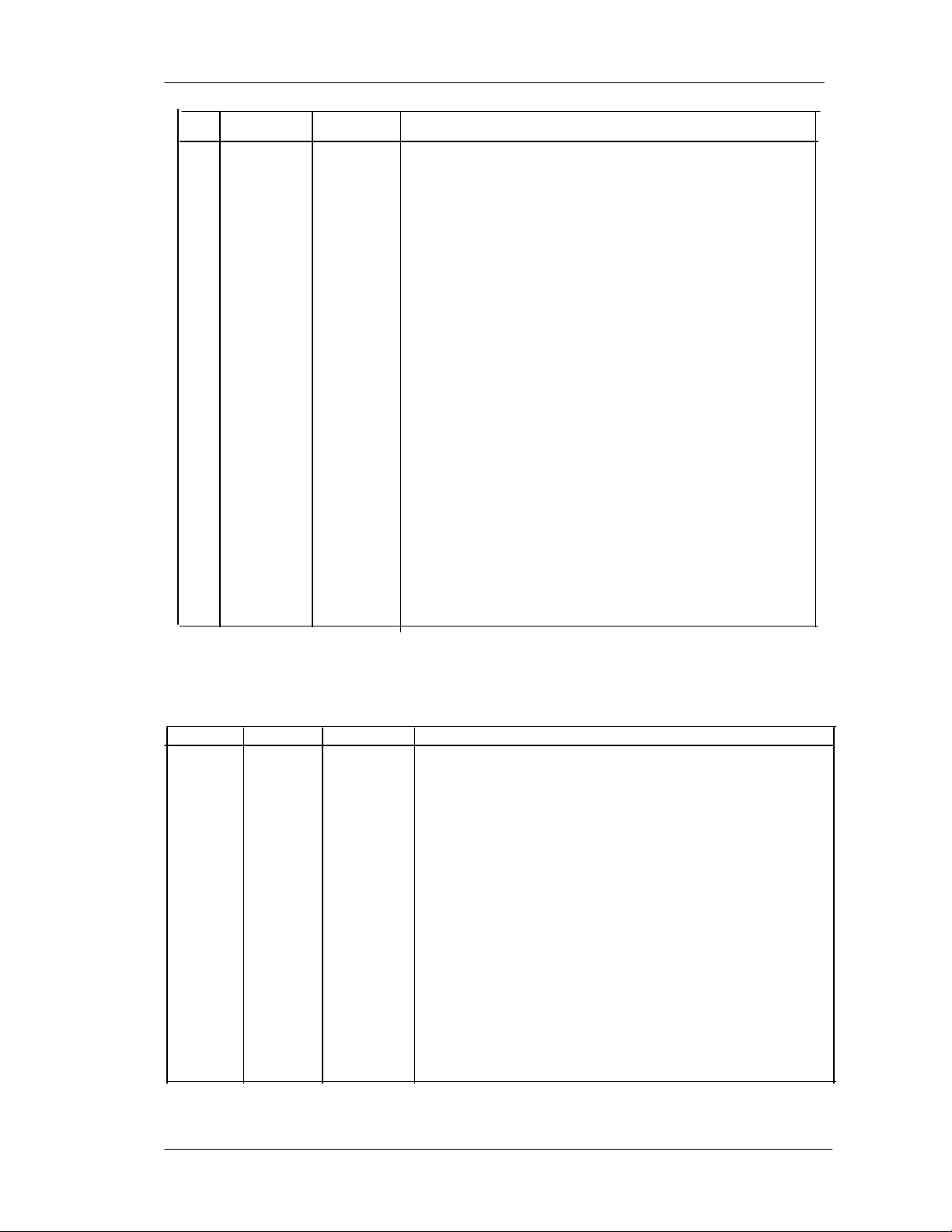
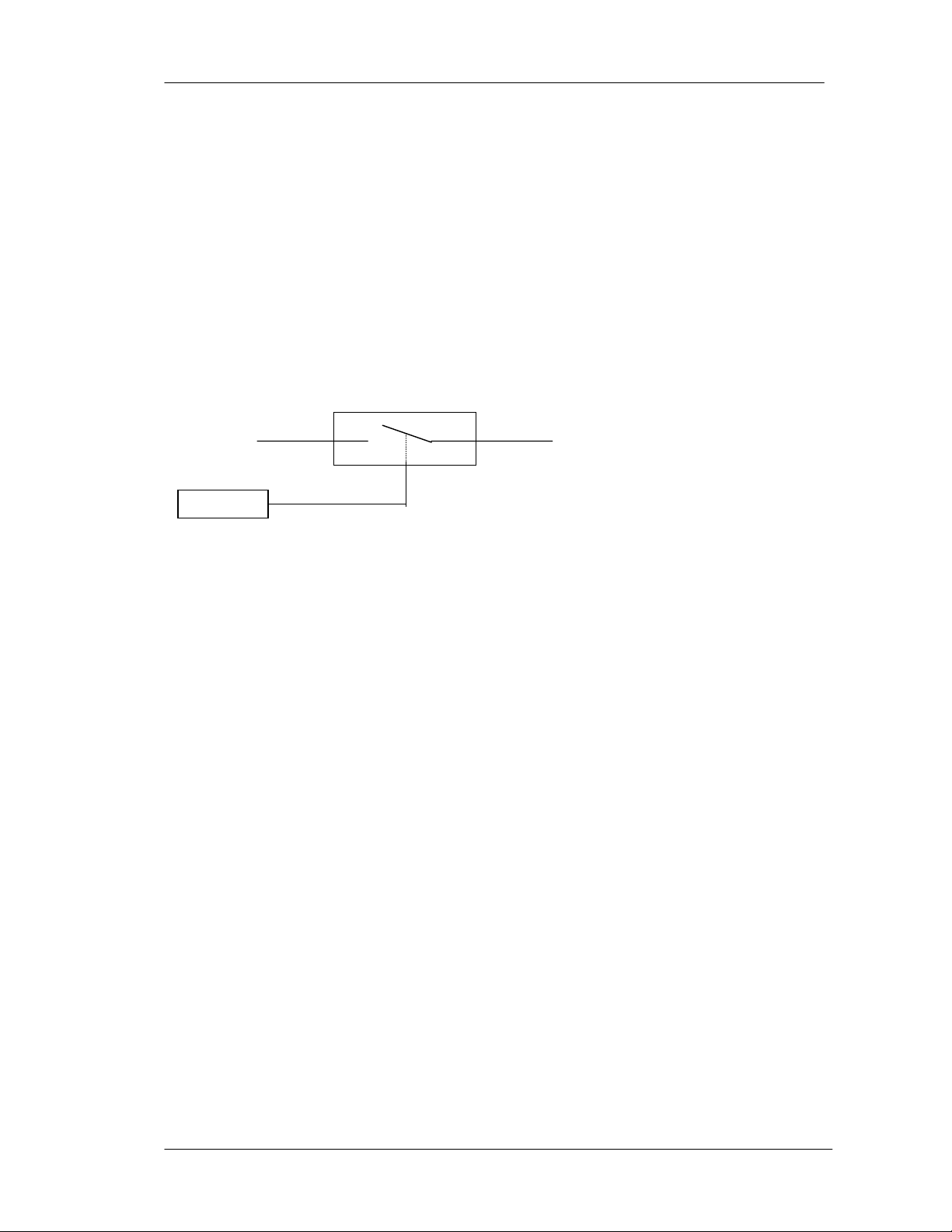
• Chế độ 1- chế độ timer 16 bit.
Hoạt động như timer 16 bit đầy đủ.
Cờ báo tràn là bit TFx trong TCON có thể đọc hoặc ghi bằng phầm mềm.
MSB của giá trị trong các thanh ghi timer là bit 7 của THx và LBS là bit 0 của
TLx. Các thanh ghi timer (Tlx/THx) có thể được đọc hoặc ghi bất cứ lúc nào bằng
phầm mềm.
Xung nhịp
Timer Cờ báo tràn
• Chế độ 0- chế độ tự động nạp lại 8 bit.
TLx hoạt động như một timer 8 bit, trong khi đó THx vẫn giữ nguyên giá trị
được nạp. Khi số đếm tràn tứ FFH đến 00H, không những cờ timer được set mà giá trị
trong THx đồng thời được nạp vào TLx. Việc đếm tiếp tục từ giá trị này lên đến FFH
xuống 00H và nạp lại... chế độ này rất thông dụng vì sự tràn timer xảy ra trong những
khoảng thời gian nhất định và tuần hoàn một khi đã khởi động TMOD và THx.
Xung nhịp
timer
Nạp lại
Cờ báo tràn
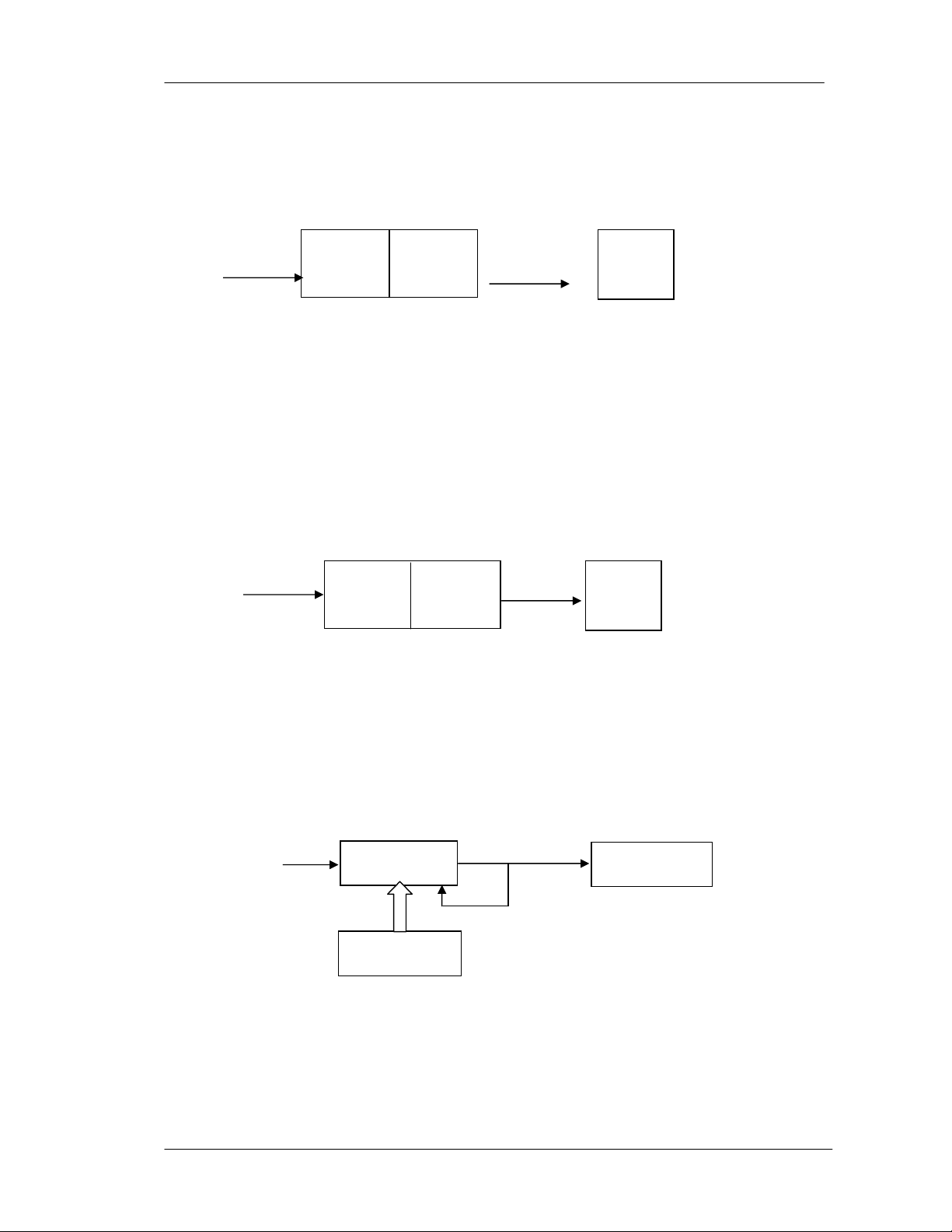
• Chế độ 3- chế độ tách timer
Timer 0 tách thành hai timer 8 bit (TL0 và TH0), TL0 có cờ báo tràn là TF0 và
TH0 có cờ báo tràn là TF1.
TLx THx
(5 bit) (8 bit)
TFx
TLx THx
(5 bit) (8 bit)
TFx
TLx
(
8 bit
)
TFx
THx
(
8 bit
)
Mạch khống chế nhiệt độ
Timer 1 ngưng ở chế độ 3, nhưng có thể được khởi động bằng cách chuyển
sang chế độ khác. Giới hạn duy nhất là cờ báo tràn TF1 không còn bị tác động khi
timer 1 bị tràn vì nó đã được nối tới TH0.
Khi timer 0 ở chế độ 3, có thể cho timer 1 chạy và ngưng bằng cách chuyển nó ra
ngoài và vào chế độ 3. Nó vẫn có thể được sử dụng bởi port nối tiếp như bộ tạo tốc độ
baund hoặc nó có thể được sử dụng bằng bất cứ cách nào không cần ngắt (vì nó không
còn được nối với TF1).
Xung nhịp
Timer
Xung nhịp
Timer
I/12 Fosc Cờ báo tràn
e.Nguồn tạo xung nhịp.
Có hai nguồn tạo xung nhịp có thể có, được chọn bằng cách ghi vào bit C/T
(counter/timer) trong TMOD khi khởi động timer. Một nguồn tạo xung nhịp dùng cho
định khoảng thời gian, cái khác cho đếm sự kiện.
Crytal
Timer
Clock
T0 or T1
pin
0=Up (Internal Timing)
1=Down (Event Counting)
Nguồn xung tạo nhịp
- Định khoảng thời gian (interval timing)
Nếu C/T =0 hoạt động timer liên tục được chọn và timer được dùng cho việc định
khoảng thời gian. Lúc đó, timer lấy xung nhịp từ bộ dao động trên chip. Bộ chia 12
được thêm vào để giảm tần số xung nhịp đến giá trị thích hợp cho phần lớn các ứng
dụng. Như vậy thạch anh 12 MHz sẽ cho tốc độ xung nhịp timer 1 MHz. Báo tràn
timer xảy ra sau một số (cố định) xung nhịp, phụ thuộc vào giá trị ban đầu được nạp
vào các thanh ghi timer TLx/THx.
- Đếm sự kiện (Event counting)
- Nếu C/T=1, timer lấy xung nhịp từ nguồn bên ngoài. Trong hầu hết các ứng
dụng nguồn bên ngoài này cung cấp cho timer một xung khi xảy ra một “sự kiện “,
TL1 TH1
TL0 TF0
TH0 TF1
On chip
Osillator
÷12
−
T
C
/
Mạch khống chế nhiệt độ
timer dùng đếm sự kiện được xác định bằng phần mềm bằng cách đọc các thanh
ghi TLx/THx vì giá trị 16 bit trong các thanh ghi này tăng thêm 1 cho mỗi sự kiện.
Nguồn xung nhịp ngoài có từ thay đổi chú7c năng của các chân port 3. Bit 4 của
port 3 (P3.4) dùng làm ngõ vào tạo xung nhịp bên trong timer 0 và được gọi là “T0”.
Và p3.5 hay “T1” là ngõ vào tạo xung nhịp cho timer 1.
f.Bắt đầu dừng và điều khiển các timer.
Phương pháp mới đơn giản nhất để bắt đầu (cho chạy) và dừng các timer là dùng
các bit điều khiển chạy :TRx trong TCON, TRx bị xóa sau khi reset hệ thống. Như
vậy, các timer theo mặc nhiên là bị cấm (bị dừng). TRx được đặt lên 1 bằng phần mềm
để cho các timer chạy.
Xung nhịp
Timer
Các thanh ghi timer
0=lên : timer dừng
1=xuống : timer chạy
cho chạy và dừng timer
Vì TRx ở trong thanh ghi TCON có địa chỉ bit, nên dễ dàng cho việc điều khiển các
timer trong chương trình. Ví dụ : cho timer 0 chạy bằng lệnh : SETB TR0 và dừng
bằng lệnh SETB TR0
Trình biên dịch sẽ thực hiện việc chuyển đổi ký hiệu cần thiết từ “TR0” sang địa chỉ
bit đúng. SETB TR0 chính xác giống như SETB 8CH.
g.Khởi động và truy xuất các thanh ghi timer.
Thông thường các thanh ghi được khởi động một lần ở đầu chương trình để đặt
chế độ làm việc cho đúng. Sau đó trong thân chương trình các timer được cho chạy,
dừng , các bit cờ được kiểm tra và xóa, các thanh ghi timer được đọc và cập nhật...
theo đòi hỏi của các ứng dụng.
TMOD là thanh ghi thứ nhất được khởi động vì nó đặt chế độ hoạt động. Ví dụ
các lệnh sau khi khởi động timer 1 như timer 16 bit (chế độ 1) có xung nhịp từ bộ dao
động trên chíp cho việc địng khoảng thời gian.
MOV TMOD,#00010000B
Lệnh này sẽ đặt M1=0 vả M0=1 cho chế độ 1, C/T=0 và GATE=0 cho xung
nhịp nội và xóa các bit chế độ timer 0. Dĩ nhiên timer thật sự không bắt đầu định thời
cho đến khi bit điều khiển chạyy TR1 được đặt lên 1.
TRx


![Máy lạnh trung tâm (Central Air Conditioner Units) và ngành lạnh (Refrigeration): [Thông tin chi tiết/Hướng dẫn/ Tư vấn]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120202/luly_meo1/135x160/refrigeration_and_air_conditioning_equipment_cooling_split_2_9572.jpg)




![Mạch đo và khống chế nhiệt độ P3: Đề tài [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2010/20100922/goixanh/135x160/mach_do_va_khong_che_nhiet_do_p3_5214.jpg)




![Giáo trình Tính toán thiết kế hệ thống máy lạnh và điều hoà không khí (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoabattu2026/135x160/70831778842526.jpg)













%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)