Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 117
CHƯƠNG 5
KỸ THUẬT LẬP TRÌNH ĐIỀU KHIỂN TRÌNH TỰ (5 LT)
Ví dụ về các bước thủ tục tổng quát.
5.1. Điều khiển trình tự dùng thanh ghi.
5.1.1. Nguyên lý cơ bản điều khiển trình tự dùng thanh ghi.
5.1.2. Ví dụ về điều khiển tay máy dùng thanh ghi.
(Liên hệ lại chương 3)
5.2 Sequence Control Relay (Relay điều khiển tuần tự):
5.2.1. Lệnh STL và lập trình SCR:
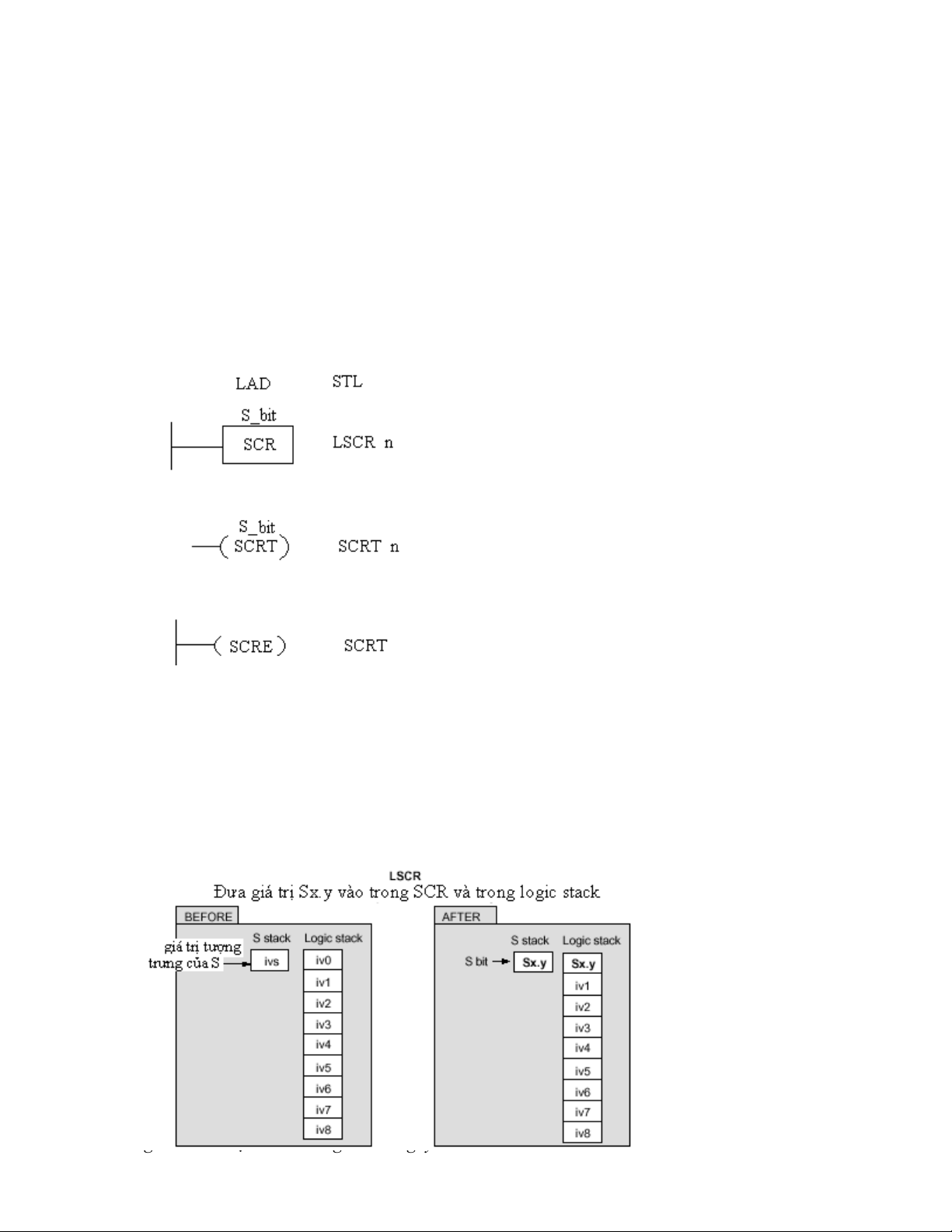
+ Lệnh SCR: Lệnh đánh dấu vị trí bắt đầu của
đoạn điều khiển trình tự. Khi n có giá trị logic
bằng 1 thì cờ được phất cho phép đoạn điều khiển
trình tự bắt đầu làm việc. Đoạn điều khiển trình tự
phải được kết thúc bằng lệnh SCRE.
+ Lệnh SCRT:Lệnh thực hiện việc chuyển bit điều
khiển trình tự sang một trạng thái kế tiếp khác (set
bit kế tiếp). Khi có tín hiệu truyền đến lệnh thì S
bit được tham chiếu sẽ set lên và relay điều khiển
trình tự này bắt đầu hoạt động. Đoạn SCR đang
được thực hiện lập tức trở về off.
+ Lệnh SCRE: Lệnh đánh dấu sự kết thúc của
đoạn chương trình điều khiển trình tự được bắt đầu
bằng lệnh SCR.
Trong STL, LAD, FBD các relay điều khiển trình tự được sử dụng để quản lý
các hoạt động của máy móc hoặc những đoạn chương trình điều khiển theo từng bước.
Lệnh LSCR chuyển trạng thái logic của SCR vào trong ngăn xếp (stacks) tương ứng
với giá trị của S bit được tham chiếu bởi lệnh. Đoạn chương trình có hoạt động hay
không là phụ thuộc vào kết quả của SCR stack. Đỉnh ngăn xếp được đưa kết quả của S
bit (được tham chiếu trong lệnh) ra trực tiếp cuộn dây (LAD) hay hộp (FBD). Hình 1
mô tả sự hoạt động của
S stack và logic stack
và kết quả của việc
thực hiện lệnh LSCR.
+ Các vấn đề cần lưu ý
trong khi sử dụng relay
điều khiển trình tự:
- Tất cả các vấn đề
logic giữa lệnh LSCR
và SCRE tạo ra bởi
relay điều khiển trình
tự tuỳ thuộc vào kết
Hình 1: Kết quả của việc thực hiện lệnh LSCR
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 118
quả của S stack của quá trình thực hiện lệnh. Còn các vấn đề logic giữa lệnh SCRE
và lệnh LSCR (bên ngoài nội dung của chương trình điều khiển trình tự) không phụ
thuộc vào kết quả cuả S stack.
- Lệnh SCRT set S bit cho phép thực hiện đoạn lệnh SCR kế tiếp và cũng reset S bit
được thực hiện trước đó.
+ Các vấn đề hạn chế khi sử dụng lệnh điều khiển trình tự:
- Bạn không thể sử dụng nhiều S bit giống nhau cho nhiều hơn một chương trình. Ví
dụ, nếu bạn sử dụng S0.1 trong chương trình chính, bạn không thể sử dụng nó trong
chương trình con hoặc chương trình xử lý ngắt.
- Không sử dụng lệnh nhảy JMP và lệnh khai báo nhãn LBL trong đoạn SSR. Nghĩa là
không cho phép nhảy vào trong đoạn SCR từ bên ngoài hoặc bên trong hoặc từ bên
trong nhảy ra. Bạn có thể thực hiện cặp lệnh JMP và LBL xung quanh đạon SCR.
- Bạn không thể sử dụng lệnh FOR...NEXT và lệnh END trong đoạn chương trình
SCR.
5.2.2. AND nhánh SCR:
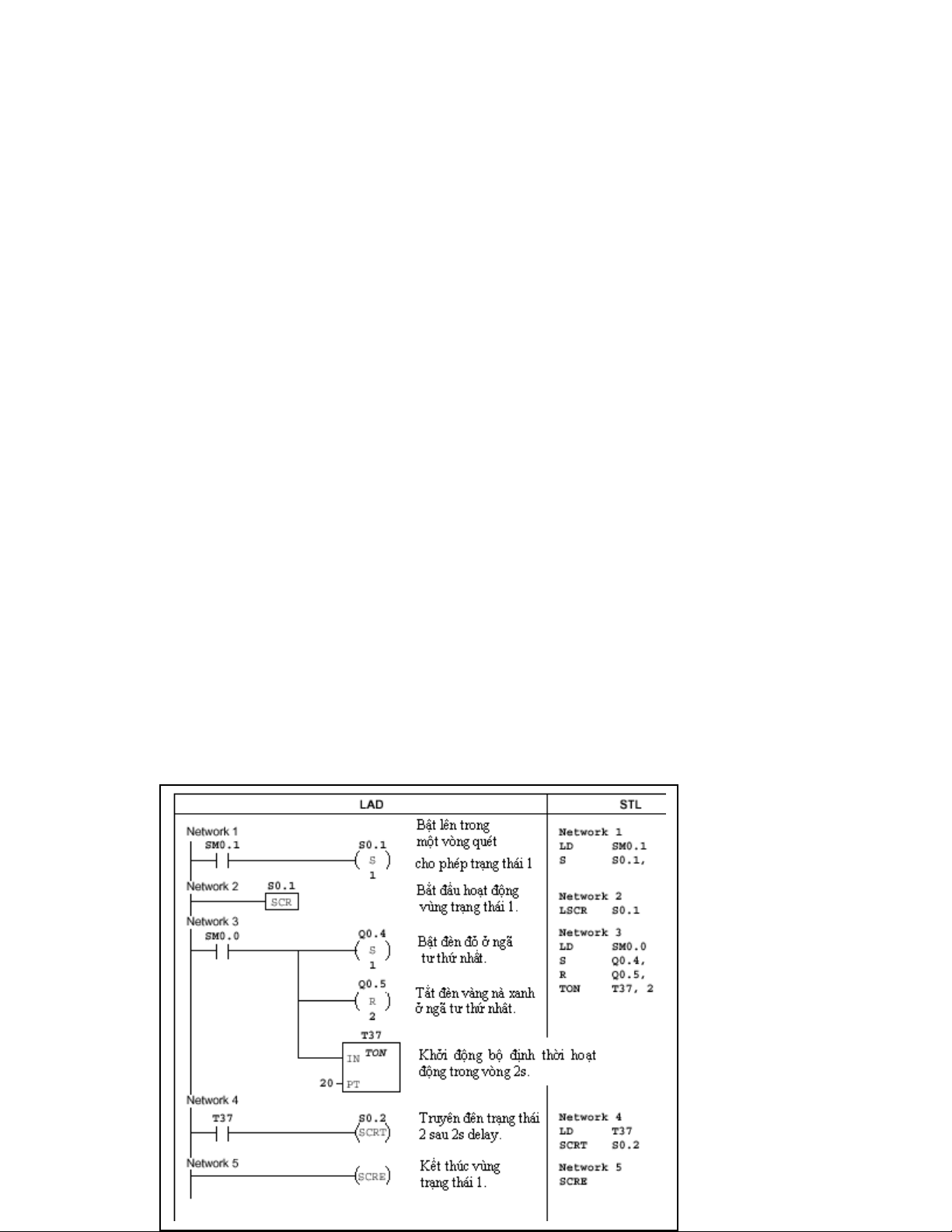
Ví dụ cách sử dụng lệnh SCR (đây cũng là ví dụ về cách sử dụng lệnh AND nhánh):
Trong ví dụ này, bit SM0.1 được sử dụng để set bit S0.1tương ứng với trạng thái
SCR1 1 hoạt động trong vòng quét đầu tiên.
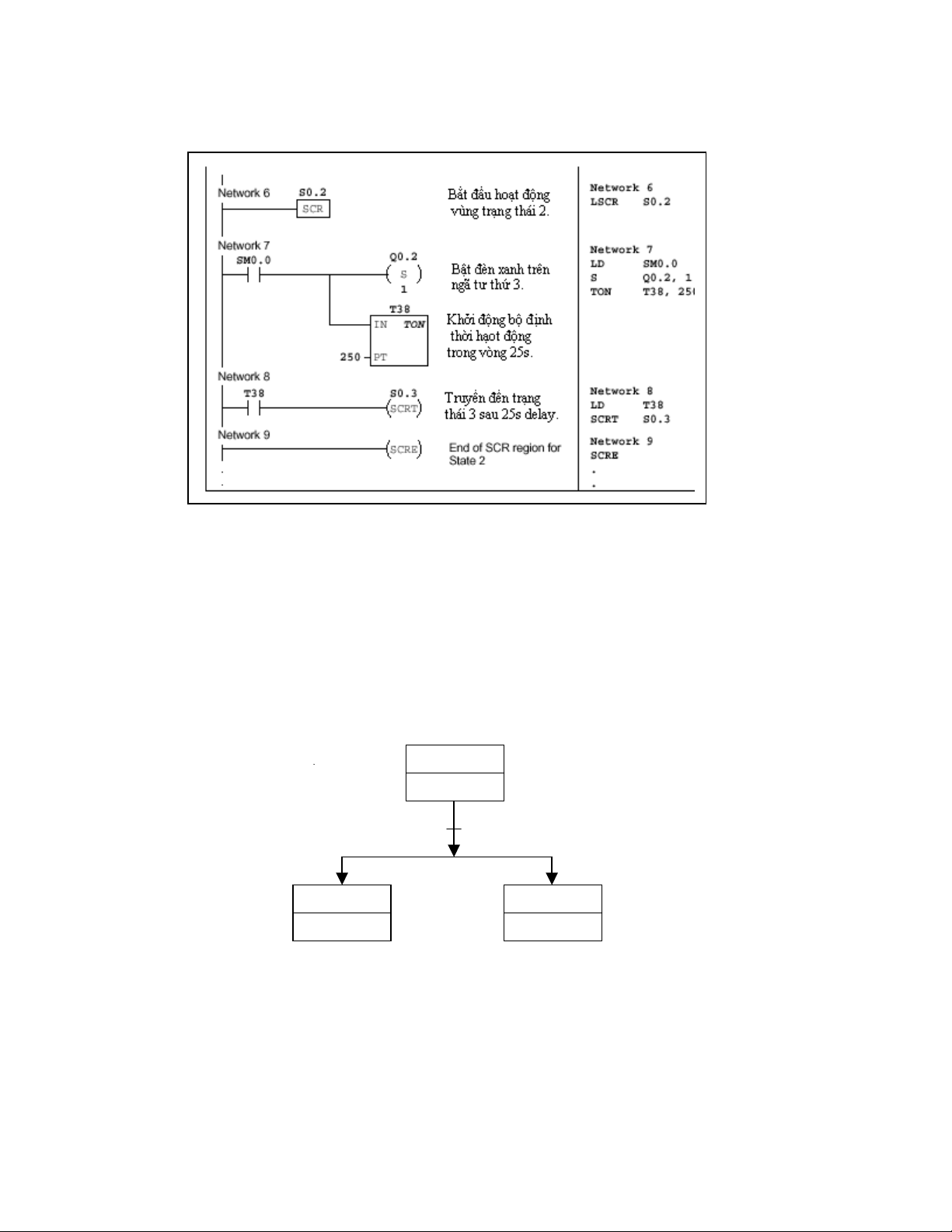
Sau thời gian delay 2s, bit T37 sẽ chuyển tiếp đến trạng thái SCR2. Trong quá
trình chuyển tiếp này, nó sẽ làm ngưng trạng thái SCR1 và bắt đầu hoạt động ở trạng
thái SCR2 (S0.2).
Trong vùng nhớ dữ liệu của PLC S7-200 có vùng nhớ S 32 byte dành cho điều
khiển trình tự.
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 119
5.2.3. Điều khiển phân kỳ:
Trong nhiều ứng dụng, dòng trạng thái đơn phân đồng thời thành hai hoặc nhiều dòng.
Khi đó các dòng trong điều khiển phân kỳ cùng đi ra từ một dòng đơn phải hoạt động
đồng thời. Xem mô tả hai dòng phân kỳ ở hình 2.
Dòng điều khiển phân kỳ có thể được thực hiện bằng cách bổ sung cùng một lúc nhiều
lệnh SCRT vào trong một chương trình SCR. Xem ví dụ sau:
State L
State L State L
Transition Condition
Hình 2: Dòng điều khiển phân kỳ
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 120
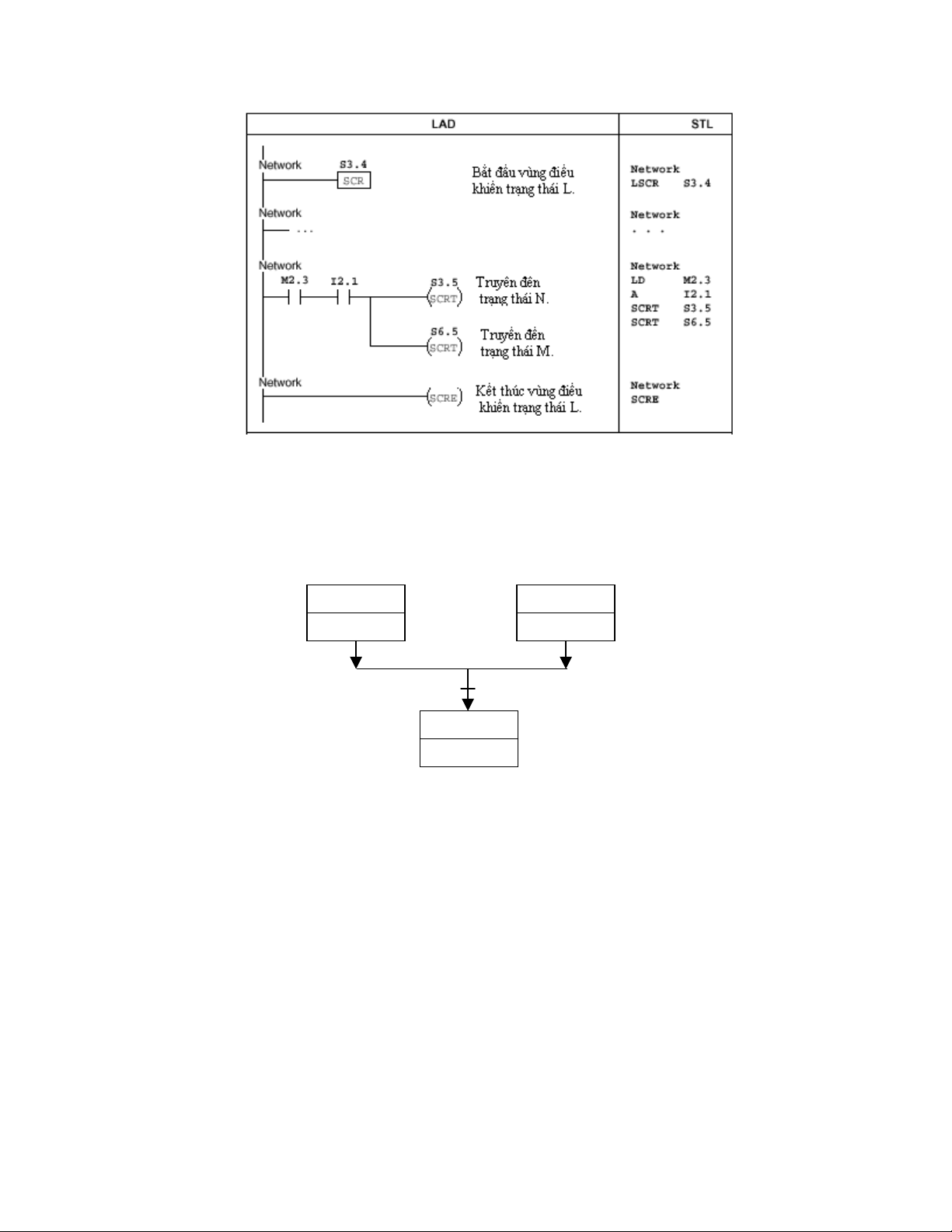
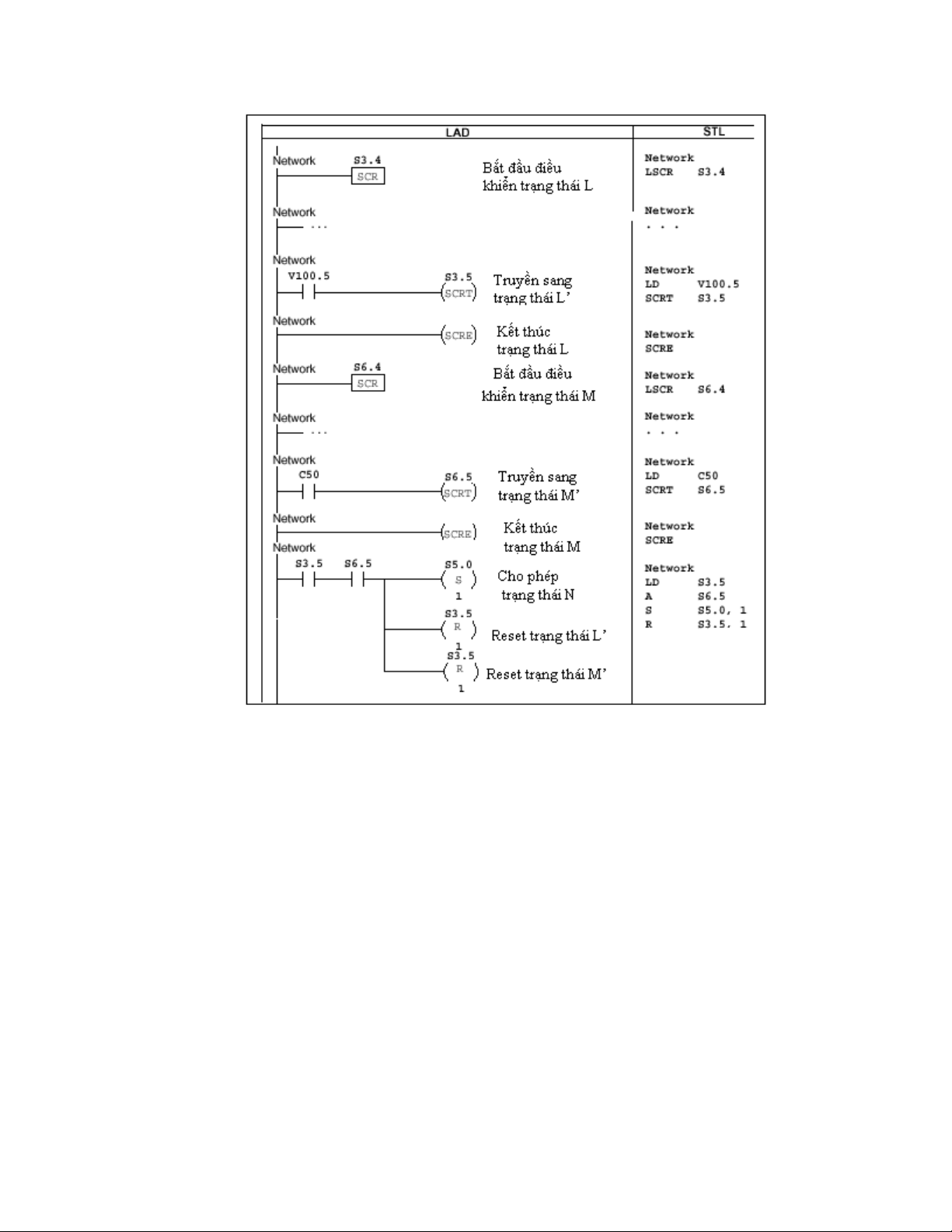
5.2.4. Điều khiển hội tụ:
Cũng nhiều trường hợp tương tựphát sinh khi hai hoặc nhiều dòng “trạng thái tuần tự”
phải kết hợp lại thành dòng đơn. Sự kết hợp đó gọi là hội tụ. Tất cả các dòng đến phải
hoàn tất trước khi trạng thái tiếp theo được thực hiện. Xem mô tả hai dòng phân kỳ ở
hình 3.
Đều khiển dòng hội tụ có thể bổ sung vào trong chương trình SCR bằng cách truyền từ
trạng thái L đến trạng thái L’ và từ trạng thái M đến trạng thái M’. Khi hai bit trang
được trình diễn là đúng thì trạng thái N tiếp theo được cho phép, xem ví dụ sau:
Hình 3: Dòng điều khiển phân kỳ
State N
State L State M
Transition Condition
Đề cương chi tiết môn học điều khiển logic Bộ môn tự động Đo Lường – Khoa Điện
Người biên soạn: Lâm Tăng Đức - Nguyễn Kim Ánh 121
Ứng dụng: Dùng để kết thúc một hoặc nhiều thiết bị của quá trình điều khiển khi không
muốn nó tiếp diễn trong chu trình.
5.2.5. Sự lặp lại hoạt động trình tự:
Được ứng dụng trong những bài toán công nghệ hoạt động theo từng bước (step) và
theo một chu trình nhất định không được phép thay đổi. Ví dụ điều khiển máy “gắp-
đặt”; đèn giao thông; điều khiển máy trộn nhiên liệu...Có thể mô tả như sau:


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)