1
HC VIN KTHUT QUÂN S
KHOA HÀNG KHÔNG VŨTR
BÀI GiNG MÔN HC
HTHNG SN XUT LINH HOT
TS. Trn ðc Tăng
Bmôn CNTB & HKVT
ðin thoi: 0973 991486
Email: tranductang@yahoo.com
TS.TrnðcTăng– KhoaHKVT
5. Hthng lp ráp linh hot
2. Máy ño ta ñ (CMM)
3. Robot trong hthng SXLH
Nidung
4. Tbào SXLH (FMC), hthng FMS
1. Các máy và trung tâm gia công
CNC
Chương2:Thitb trongh thngFMS
6. Hthng kim tra tñng ca FMS
7. Hthng vn chuyn, kho cha ca FMS
2
TS.TrnðcTăng– KhoaHKVT
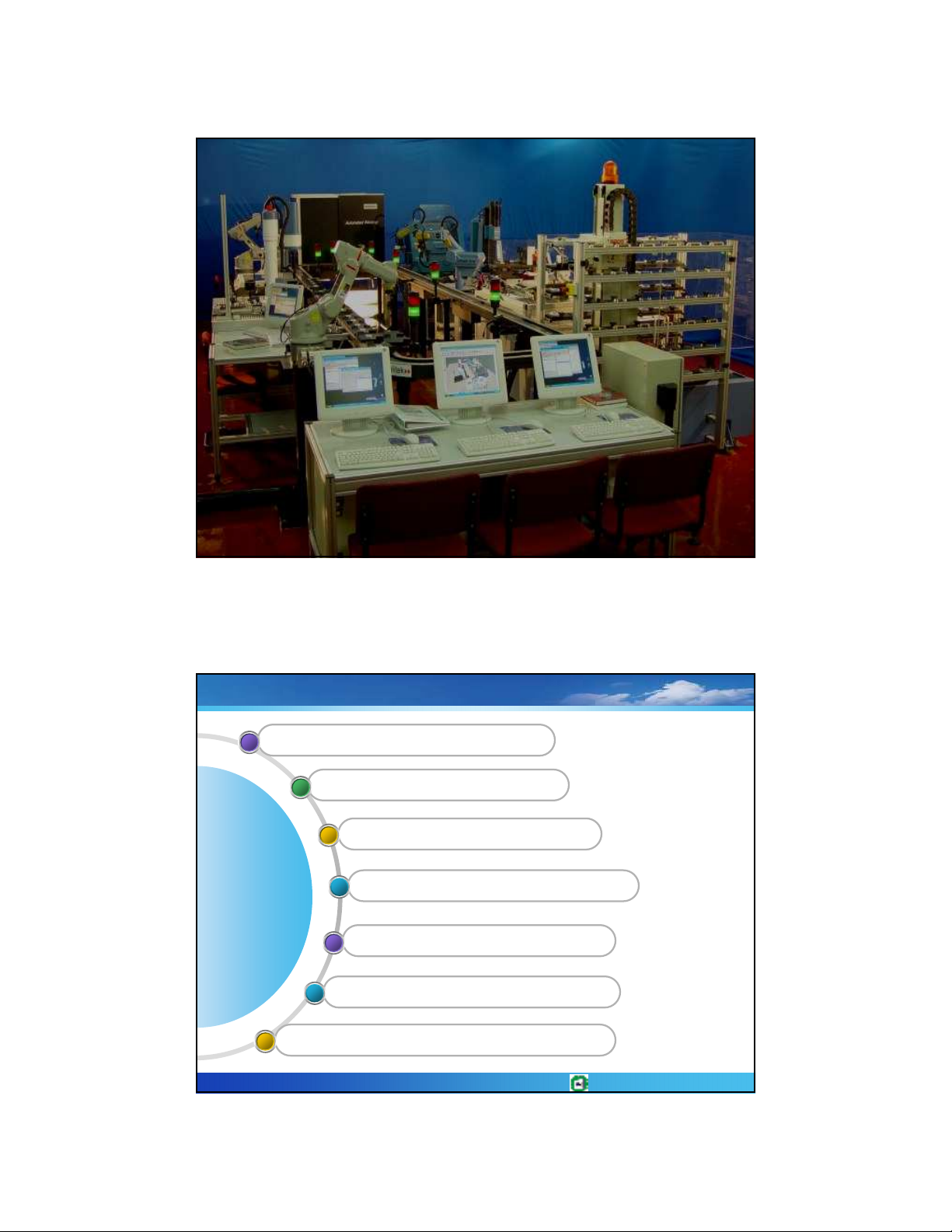
1.Giithiu
HÖ thèngsnxuÊtlinhho¹tth−ênggåmmétsè thiÕtbÞkh¶
tr×nh,®Ó s¶nxuÊtmétsè lo¹is¶nphÈmnhÊt®Þnh.
C¸cthiÕtbÞtrªn®−îcliªnkÕtvíinhau(liªnkÕtth«ngtin)th.nh
mét®¬nvÞs¶nxuÊtvíisù hç trî cñac¸cch−¬ngtr×nh®iÒu
khiÓn.
C¸cthiÕtbÞgiac«ngv. l¾pr¸p,cïngvíic¸cthiÕtbÞvËn
chuyÓnv. xö lýth«ngtinh×nhth.nhhÖ thiÕtbÞc¬ së cñas¶n
xuÊttÝchhîp.
Ng.ynay,c¸cthiÕtbÞs¶nxuÊtcã®Æc®iÓmchungl. ®−îc®iÒu
khiÓnb»ngkü thuËtsè.
TS.TrnðcTăng– KhoaHKVT
2.Cácmáyvà trungtâmgiacôngCNC
2.1§iÒukhiÓnsè v cÊutróccñam¸yNC
AM¸yNCl. thiÕtbÞc¬ b¶ntronghÖ thèngs¶nxuÊtlinhho¹t.ThuËt
ng÷ ®iÒukhiÓnsè (numericalcontrolANC)nghÜal. m¸yNC®−îc®iÒu
khiÓnb»ngkü thuËtsè tõch−¬ngtr×nhlËps½n.NãchophÐpthÝch
ønglinhho¹tvíinh÷ngthay®æitrongs¶nxuÊtlo¹tvõav. lo¹tnhá.
ANg.ynaytÊtc¶ c¸cbé ®iÒukhiÓnNC®Òusö dôngm¸ytÝnh,nªn
thuËtng÷ CNC(computernumericalcontrol)®O thaythÕchothuËt
ng÷ NC.
AQu¸ tr×nht¹od÷ liÖu®Ó giac«ngtù ®éngmétchitiÕt®−îcgäil. lËp
tr×nhNC.Ch−¬ngtr×nhNCl. métfiled¹ngv¨ngb¶n,®−îcviÕttheo
méthÖ mO chuÈnm. bé ®iÒukhiÓncãthÓ hiÓu®−îc,®Ó h−íngdÉn
chom¸ythùchiÖnqu¸ tr×nhgiac«ngmétc¸chtù ®éng.
AC¸cth«ngtin®−îctruyÒnchobé ®iÒukhiÓnNC®−îcchiath.nh
th«ngtinh×nhhäc(G,X,Y,Z,…)v. th«ngtinc«ngnghÖ (F,S,T,M)
3
TS.TrnðcTăng– KhoaHKVT
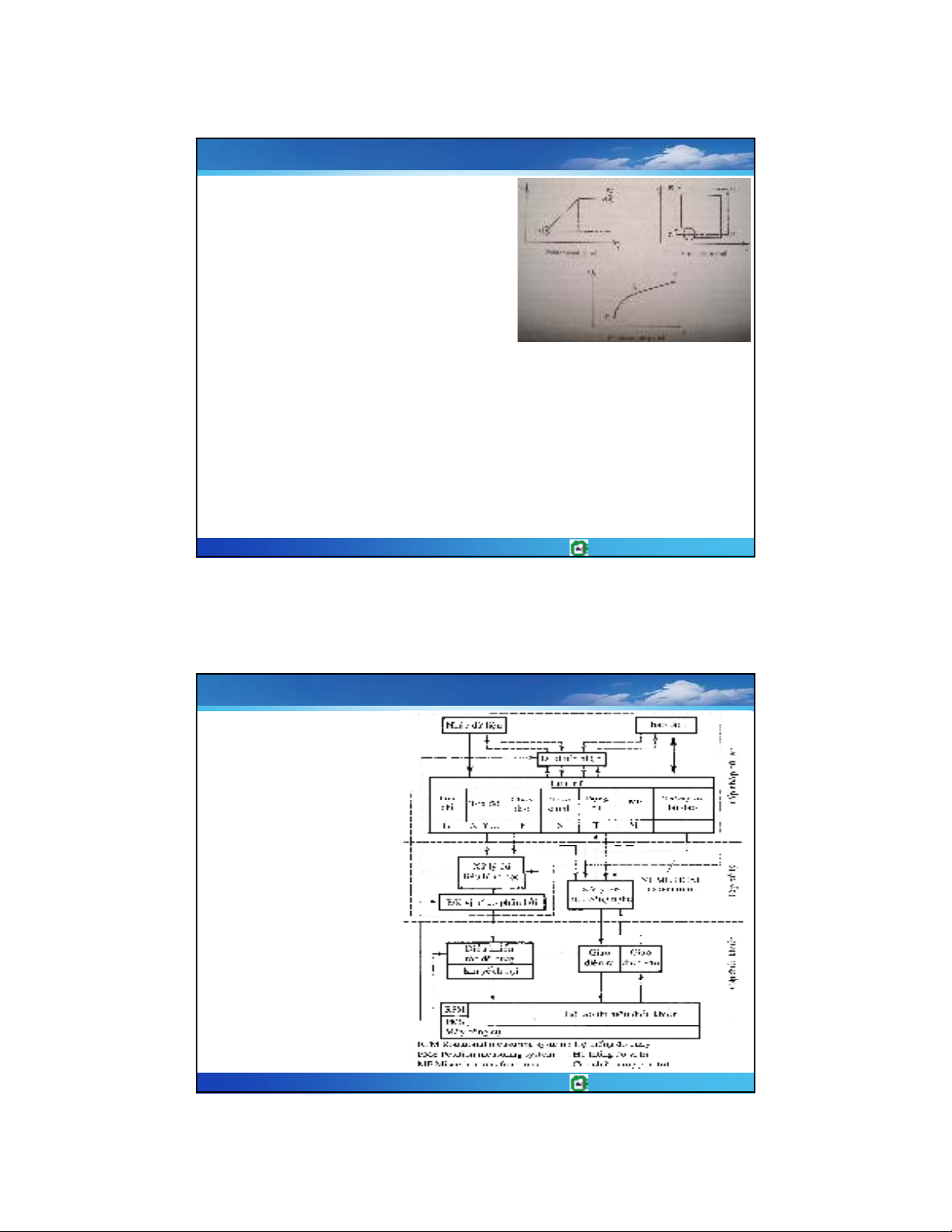
AVÒh×nhhäc,cã3kiÓu®iÒukhiÓn:
A§iÒukhiÓn®iÓmA ®iÓm
A§iÒukhiÓn®−êngth¼ng
A§iÒukhiÓncontour
§iÒukhiÓn®iÓm®iÓm chophÐp
dÞchchuyÓnnhanhtõmét®iÓmtíi
mét®iÓm.§−êngdÞchchuyÓn®−îc
x¸c®Þnhbëibé ®iÒukhiÓn
§iÒukhiÓn®−êngth¼ng chophÐpsù dÞchchuyÓndäctheométtrôc
ë méttèc®é x¸c®Þnh.
§iÒukhiÓncontour ®−îcsö dông®Ó ®iÒukhiÓnquamétsè ®−êng
(c¸c®−¬ngth¼ngv. ®−êngtrßn)ë méttèc®é x¸c®Þnh.ViÖcphèihîp
c¸c®−êngth¼ngv. ®−êngt¹oth.nhc¸c®−êngcongbÊtkú.
§iÒukhiÓnvÒc«ngnghÖ t¸c®éngtíic¸cthamsè c«ngnghÖ nh− t¾t
trôcchÝnh,®iÒukhiÓntèc®é ch¹ydao,thaydao,cÊpdungdÞchl.m
m¸t…
TS.TrnðcTăng– KhoaHKVT
AQu¸ tr×nht¹o,xö lýd÷
liÖu,v. ®iÒukhiÓnthiÕtbÞ
®−îcph©nth.nh3cÊp:
A CÊpnhËp/xuÊtd÷ liÖu:
cãchøcn¨ngnhËn
ch−¬ngtr×nh
A CÊpxö lý:®äcv. xö lý
c¸cth«ngtinc«ngnghÖ
v. h×nhhäctrongch−¬ng
tr×nh,xuÊtrac¸ctÝnhiÖu
®iÒukhiÓnc¸chÖ thèng
trªnm¸y
ACÊp®iÒukhiÓn,t¹otÝn
hiÖu®iÒukhiÓnc¸cthiÕt
bÞchÊph.nhquac¸c
giaodiÖnv.o/rat−¬ng
øng.
C¸cchøcn¨ngcñamétbé ®iÒukhiÓnNC
4
TS.TrnðcTăng– KhoaHKVT
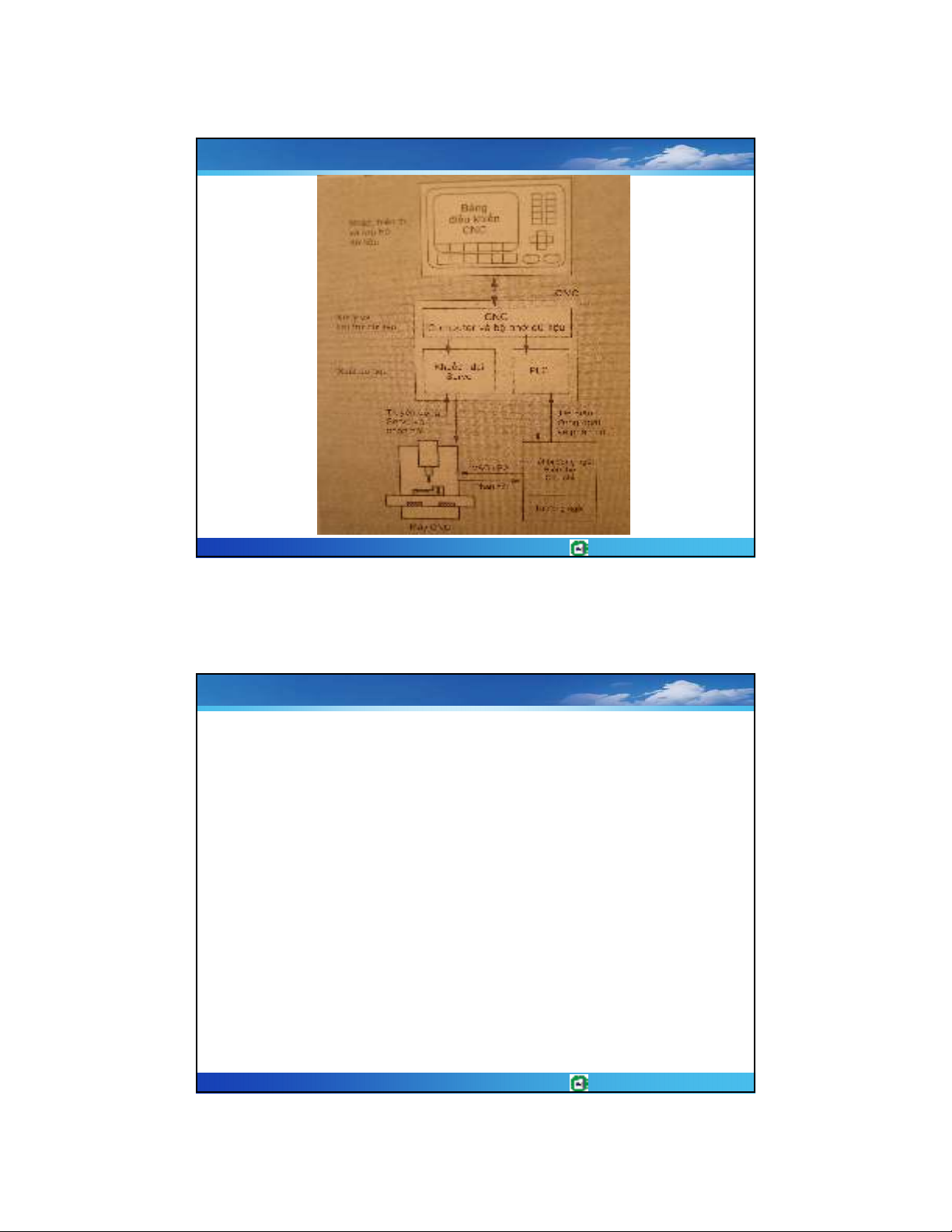
Nguyênlýc+amáygiacôngcơkhí cóñi0ukhi1nCNC
TS.TrnðcTăng– KhoaHKVT
§Æc®iÓmcÊutróccñam¸yCNC
C¸cth.nhphÇnc¬ b¶ncñamétm¸yNCgåm:
PhÇnm¸yc«ngcô,gåm:c¸chÖ thèngc«ngt¸cv. chÊph.nh(c¬
khÝ,®iÖn,thuû khÝ)®Ó thùchiÖnchøcn¨nggiac«ng.PhÇnm¸yc«ng
côvÒc¬ b¶ncãcÊutrócnh− c¸cm¸yth«ngth−êng.
PhÇn®iÒukhiÓn,gåm:
ABé ®iÒukhiÓn(controller),th−ênggäil. bé CNC,gåmphÇncøngv.
phÇnmÒmthùchiÖnc¸cchøcn¨ng®iÒukhiÓn.
AHÖ ®ol−êngv. ®iÒukhiÓnvÞtrÝ.
AHÖ ®iÒukhiÓnphÇnc«ngt¸c(nh− trôcchÝnhcñam¸yc«ngcô).
Sovíim¸yth«ngth−êng,chÕ®é l.mviÖccñac¸cm¸yCNCnÆng
nÒh¬n,nh−:tèc®é trôcchÝnhcaog¸p5A10lÇn(4000– 15000v/ph),
tèc®é ch¹ydaocaogÊph.ngtr¨mlÇn(®Õn10000mm/ph).V× vËy
yªucÇukü thuËt®èivíim¸yCNCkh¾tkheh¬nsovíim¸yth«ng
th−êng.
5
TS.TrnðcTăng– KhoaHKVT
C¸cyªucÇu®èivíim¸yCNC
§é c÷ngv÷ngtÜnhv. ®éngcñahÖ thèngc¬ khÝcao,®¶mb¶o®é
chÝnhx¸ckÝchth−ícv. chÊtl−îngbÒmÆtgiac«ngcaoc¶ khigia
c«ngth« (c«ngsuÊtlín)lÉnkhigiac«ngtinh(tèc®é trôcchÝnhcao).
§é cøngv÷ngcaocßnl. yÕutè ®¶mb¶ochom¸yl.mviÖcæn®Þnh
khigiatèclín,tèc®é trôcchÝnhcao.Sö dôngvËtliÖucãkh¶ n¨ng
gi¶mchÊn,hÊpthôdao®éngcòngchophÐpt¨ngtÝnhæn®Þnhc¬
häc.
TÝnhæn®ÞnhnhiÖtcñahÖ thèngcao.BiÖnph¸p®Ó ®¹t®−îc®iÒun.y
kh«ngchØ l. gi¶mmas¸ttruyÒn®éngm. cßnl. ph©nbè nhiÖt®é
hîplý,dïngvËtliÖuv. kÕtcÊut¶nnhiÖtnhanh.
Momenqu¸ntÝnhcñac¸cc¬ cÊuchuyÓn®éngnhá,chophÐpchóng
l.mviÖcvíigiatèclín.
TS.TrnðcTăng– KhoaHKVT
Métsè ®Æc®iÓmkh¸ccñam¸yCNCsovíim¸yth«ngth−êng
ATh©nm¸yth−êngcãkÕtcÊu®óchoÆch.ntõvËtliÖucãc¬ tÝnhcao,
cãnhiÒug©n,hèc,chiakhoang,...võanhÑ,võacøngv÷ng;truyÒn
nhiÖtv. hÊpthôdao®éngtèt.
ATrongc¸chÖ truyÒn®éngquanträng®−îcdïngc¸cc¬ cÊuv. vËt
liÖugi¶mmas¸t,chÞumßn,kh«ngkhehë (vÝtmeA ®aiècbi;®−êng
dÉnh−íngl¨nhoÆctr−îtnh−ng®−îcd¸nhoÆcphñ vËtliÖuÝtma
s¸t,chÞumßn;b¸nhr¨ngkh«ngkhehë).
AGi¶mtèi®atruyÒn®éngc¬ khÝ:dïngtruyÒn®éng®iÖn,thuû lùc®iÒu
khiÓntèc®é v« cÊpthaychohépsè;nèitrùctiÕptrôc®éngc¬ lªn
trôcc«ngt¸c;dïnghépgi¶mtèch.nhtinh,thuû lùchoÆcb¸nhr¨ng
sãngA conl¨ncãtû sè truyÒnlín).
AC¸ctrôc®−îctruyÒn®éngtrùctiÕp,dïnghÖ truyÒn®éngservo.















![Tối ưu hóa hiệu suất hệ thống: Bài thuyết trình [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251107/hiepdz2703@gmail.com/135x160/35941762488193.jpg)




![Bài giảng Quản trị chất lượng trong công nghiệp thực phẩm [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250805/vijiraiya/135x160/637_bai-giang-quan-tri-chat-luong-trong-cong-nghiep-thuc-pham.jpg)

![Đề cương bài giảng Kỹ năng hoạt động công nghiệp [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250715/kimphuong1001/135x160/76971752564028.jpg)
