Giới thiệu tài liệu
Tài liệu này cung cấp hướng dẫn về thiết kế điều khiển cho hệ thống Robotics, tập trung vào điều khiển vị trí và bám quỹ đạo cho hệ tuyến tính bậc hai. Mục tiêu là giúp người học nắm vững phương pháp điều khiển tuyến tính và thiết kế các luật điều khiển thông thường.
Đối tượng sử dụng
Sinh viên và nhà nghiên cứu trong lĩnh vực Robotics và điều khiển tự động.
Nội dung tóm tắt
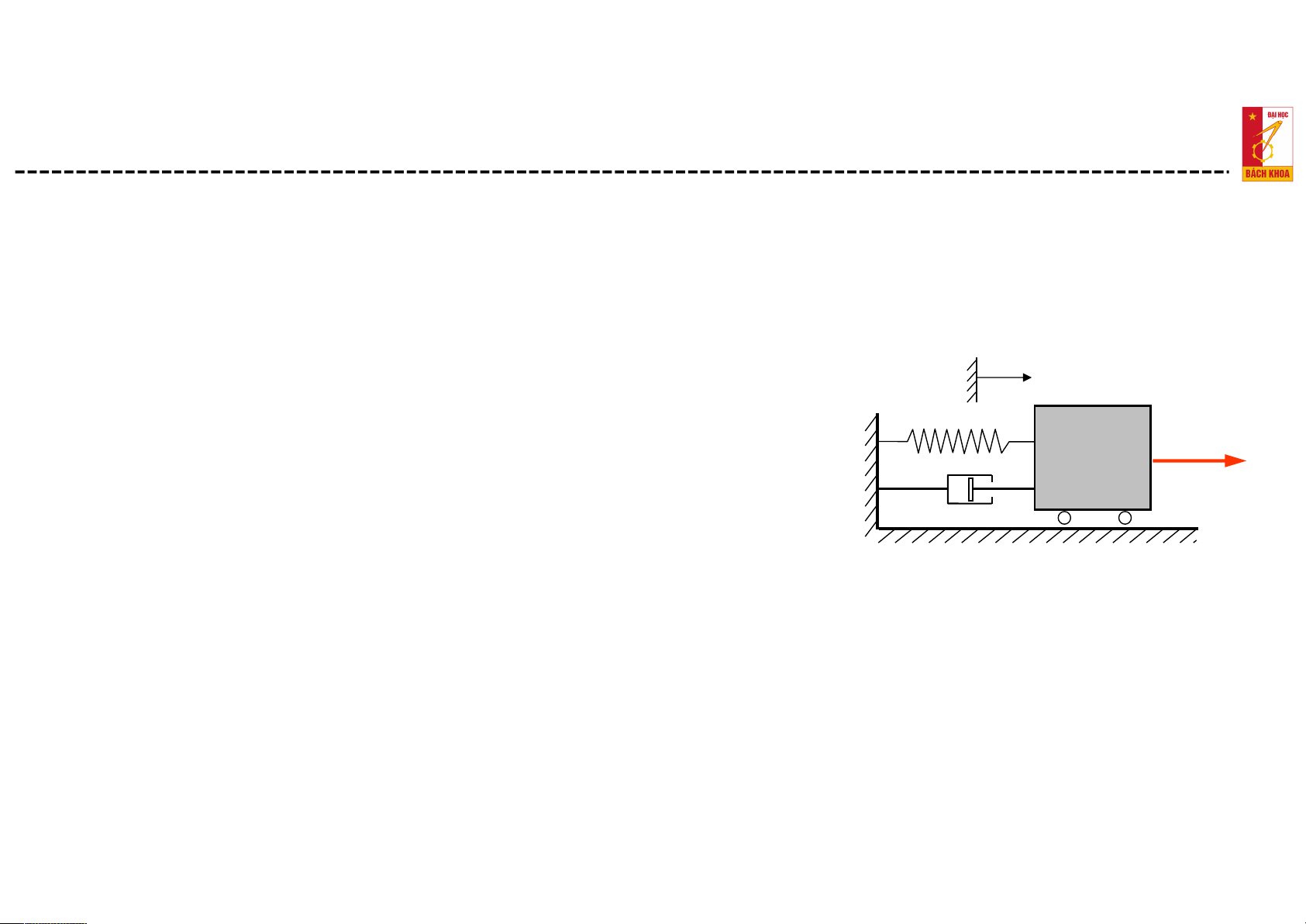
Tài liệu này trình bày chi tiết về điều khiển vị trí và bám quỹ đạo cho hệ tuyến tính bậc hai, bao gồm cả trường hợp không có nhiễu và có nhiễu tác động. Nội dung bao gồm phương trình động lực, bộ điều khiển PD, và các thành phần của luật điều khiển. Các ví dụ minh họa được cung cấp để làm rõ các khái niệm và phương pháp thiết kế. Tài liệu cũng đề cập đến việc thiết lập các luật điều khiển tuyến tính và thực hành mô phỏng điều khiển bằng MATLAB/SIMULINK. Mục tiêu chính là cung cấp cho người học kiến thức và kỹ năng cần thiết để thiết kế và điều khiển các hệ thống Robotics một cách hiệu quả.