

ME3081: Mechatronic System Design
2
Lecturer: PhD. Dang Thai Viet
Mechatronics Department, School of Mechanical Engineering, HUST
Viet.dangthai@hust.edu.vn
Chương 9. Điều khiển logic
3
Mục 2. Biểu diễn hàm logic
Mục 3. Mô hình hệ thống điều khiển số
Mục 4. Biến đổi z
Mục 1. Biến và hàm logic
ME3081: Mechatronic System Design
4
•Biến logic là hai giá trị đối lập nhau 0 và 1.Có thể được chuyển đổi từ trạng thái tương tự là mức
cao và mức thấp.
9.1. Biến và hàm logic (1)
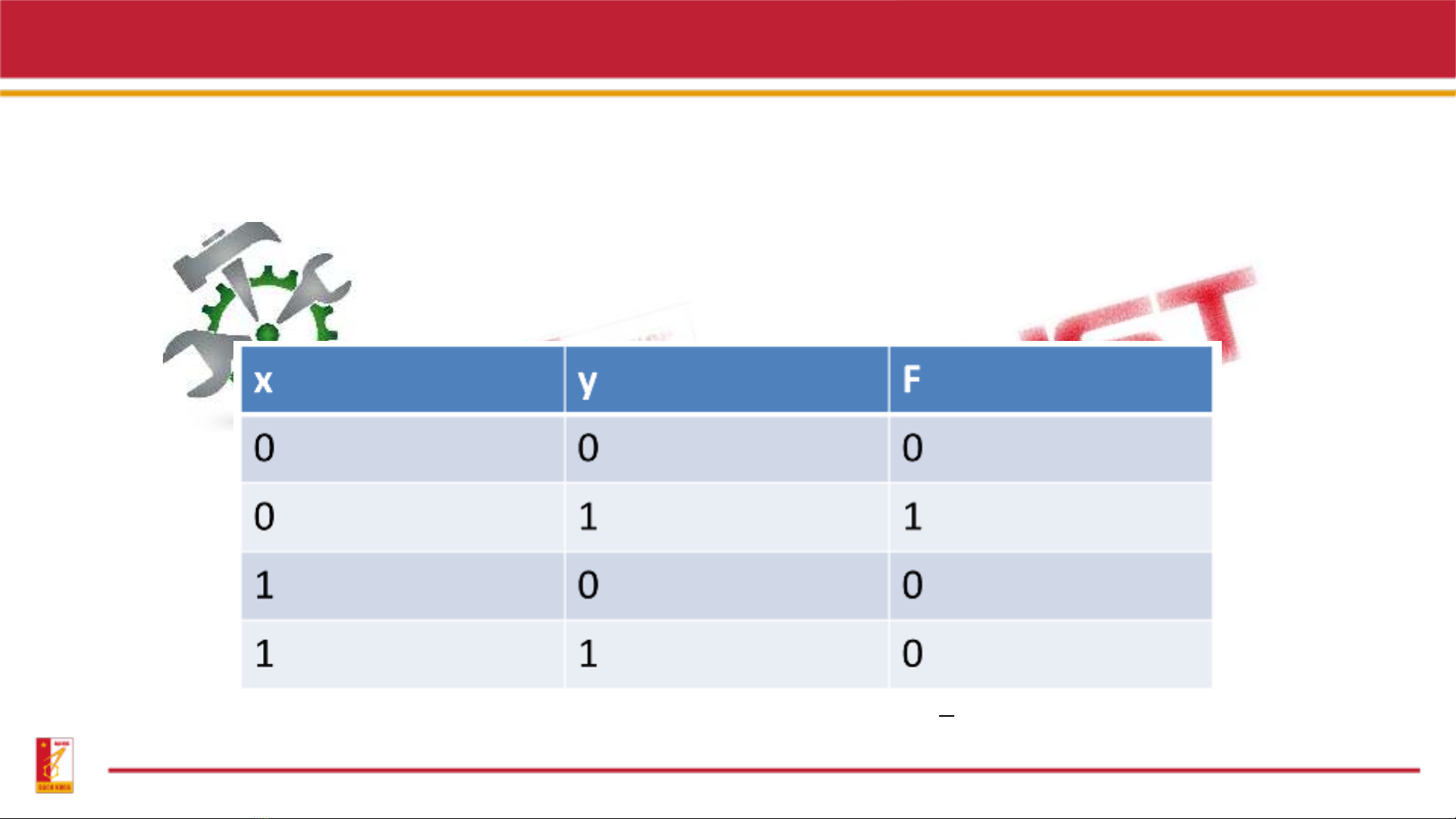
•Hàm logic thực hiện các phép toán logic của các biến logic biểu diễn quan hệ vào ra hệ thống.Biểu
diễn qua bảng chân lý.
Hình 9.1. Bảng chân lý biểu diễn quan hệ logic
.F x y=
5
•Thông qua hàm toán logic:
❑Biểu diễn quan hệ logic
.F x y=
•Thông qua bảng chân lý.Bảng Karnaugh cho nhiều biến logic.
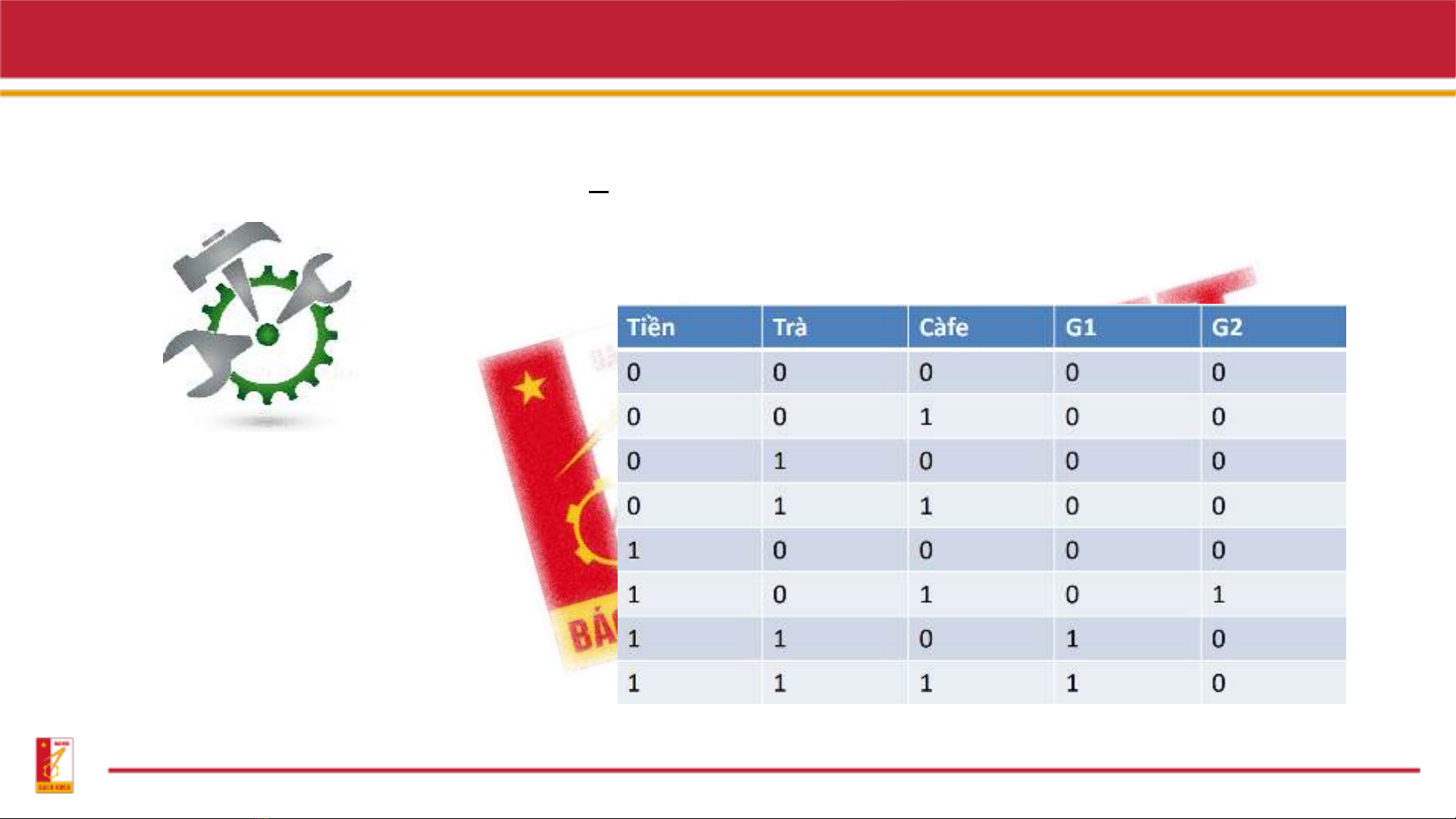
➢Ví dụ:
•Máy bán nước tự động gồm 2loại
trà và cà phê. Có các nút ấn chọn
trà, chọn cà phê và nếu ấn cả hai
nút thì chỉ ra trà. Máy chỉ hoạt
động khi có đồng xu 5000 thả vô
máy.
Hình 9.2. Bảng chân lý biểu diễn giá trị logic
9.1. Biến và hàm logic (2)

























