
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
11.
11. CƠ C
CƠ CẤ
ẤU B
U BÁ
ÁNH RĂNG
NH RĂNG
KH
KHÔNG GIAN
ÔNG GIAN
Theory of Machine
Theory of Machine 11.01
11.01 Spartial
Spartial Gear Mechanism
Gear Mechanism
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.02
11.02 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§1.
1. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
I.
I. Đ
Đặ
ặc
cđi
điể
ểm
mc
cấ
ấu
ut
tạ
ạo
o
1
p
2
p
1
O
2
O
1
ω
1
β
2
β
δ
P
t
2
p
2
a
1
a
2
ω
1
p
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.03
11.03 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§1.
1. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
I.
I. Đ
Đặ
ặc
cđi
điể
ểm
mc
cấ
ấu
ut
tạ
ạo
o
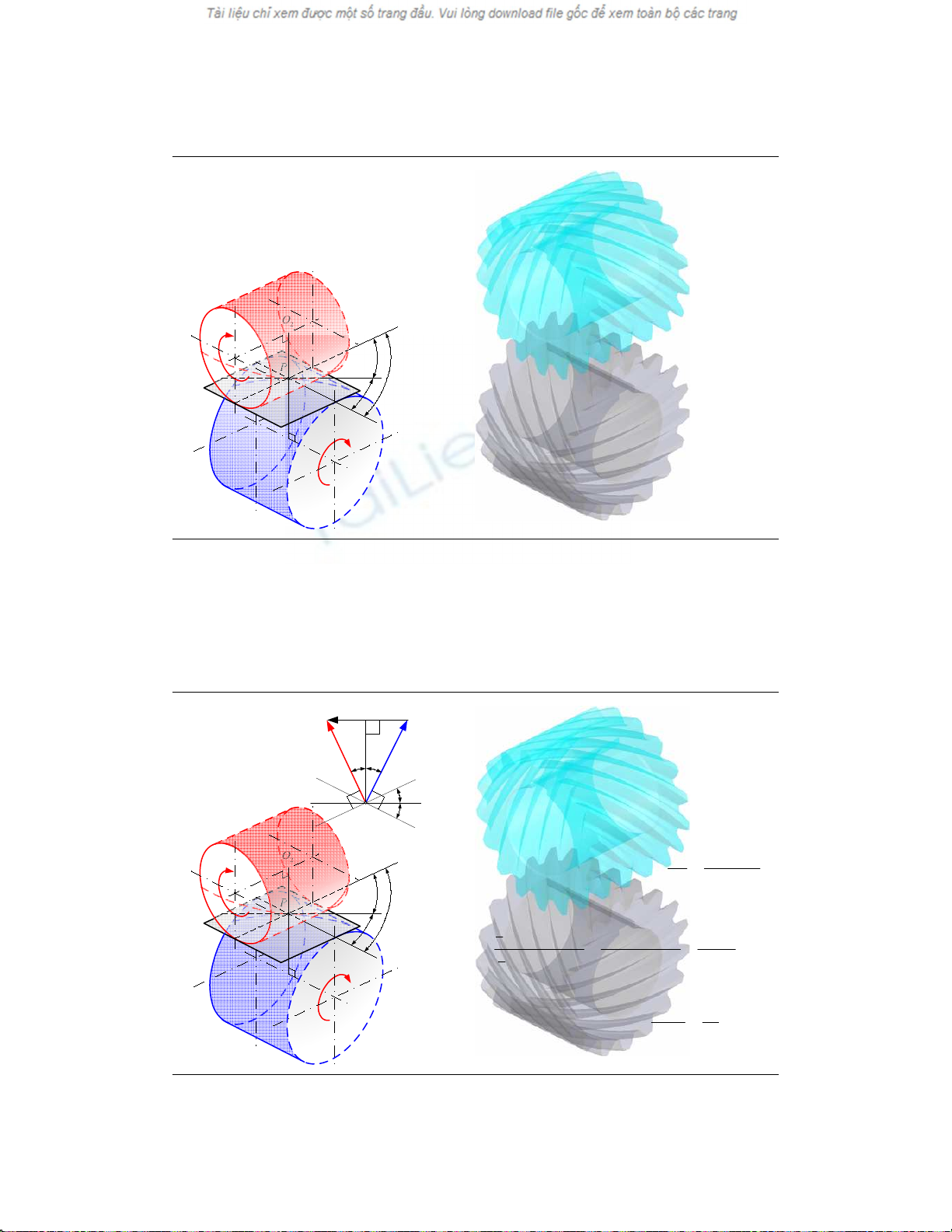
-
-L
Là
àcơ
cơ c
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụtròn
tròn răng
răng nghiêng
nghiêng d
dù
ùng
ng truy
truyề
ền
nchuy
chuyể
ển
nđ
độ
ộng
ng gi
giữ
ữa
ahai
hai
tr
trụ
ục
cch
ché
éo
onhau
nhau
-
-Hai
Hai m
mặ
ặt
tlăn
lăn c
củ
ủa
ahai
hai b
bá
ánh
nh răng
răng ti
tiế
ếp
px
xú
úc
cnhau
nhau t
tạ
ại
im
mộ
ột
tđi
điể
ểm
m
P
P
-
-Hai
Hai đư
đườ
ờng
ng sinh
sinh
p
p
1
1
v
và
à
p
p
2
2
đi
đi qua
qua
P
P
c
củ
ủa
ahai
hai m
mặ
ặt
ttr
trụ
ụ
lăn
lăn v
và
àti
tiế
ếp
ptuy
tuyế
ến
n
tt
tt
c
củ
ủa
ahai
hai đư
đườ
ờng
ng răng
răng
a
a
1
1
v
và
à
a
a
1
1
n
nằ
ằm
mtrên
trên ti
tiế
ếp
pdi
diệ
ện
nchung
chung c
củ
ủa
ahai
hai m
mặ
ặt
tlăn
lăn
-
-Hai
Hai giao
giao tuy
tuyế
ến
nc
củ
ủa
am
mặ
ặt
trăng
răng v
vớ
ới
im
mặ
ặt
tlăn
lăn c
củ
ủa
am
mỗ
ỗi
i
b
bá
ánh
nh răng
răng,
,
a
a
1
1
v
và
à
a
a
1
1
l
là
àhai
hai đư
đườ
ờng
ng xo
xoắ
ắn
nố
ốc
cti
tiế
ếp
px
xú
úc
c
nhau
nhau t
tạ
ại
i
P
P
-
-G
Gó
óc
cnghiêng
nghiêng c
củ
ủa
am
mặ
ặt
trăng
răng trên
trên m
mỗ
ỗi
ib
bá
ánh
nh răng
răng
-
-Kho
Khoả
ảng
ng c
cá
ách
ch tâm
tâm
O
O
1
1
O
O
2
2
l
là
àđư
đườ
ờng
ng vuông
vuông g
gó
óc
cchung
chung
c
củ
ủa
ahai
hai tr
trụ
ục
cb
bá
ánh
nh răng
răng (
(đi
đi qua
qua
P
P
)
)
212121
rrPOPOAOO
+
=
+
=
=
),(),,(
2111
ttpttp
∠
=
∠
=
β
β
1
p
2
p
1
O
2
O
1
ω
1
β
2
β
δ
P
t
2
p
2
a
1
a
2
ω
1
p
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.04
11.04 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§1.
1. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
211122
1122
sinsin
//
21
1212
ββωω
PP
PPPP
vvrr
ttpppp
vvv
+
⊥⊥
+
=
r
r
r
11
22
2
1
12
222111
21
cos
cos
coscos
coscos
21
β
β
ω
ω
βωβω
ββ
r
r
i
rr
vv
PP
==⇒
=
=
1
2
1
2
12
21
21
z
z
zm
zm
i
mmm
ttt
n
n
nnn
nnn
==⇒
==
==
1
2
11
22
11
2
1
22
2
1
12
1
2
1
2
1
2
cos
cos
cos
cos
zm
zm
zm
zm
zm
zm
i
n
n
s
s
s
s
===
β
β
β
β
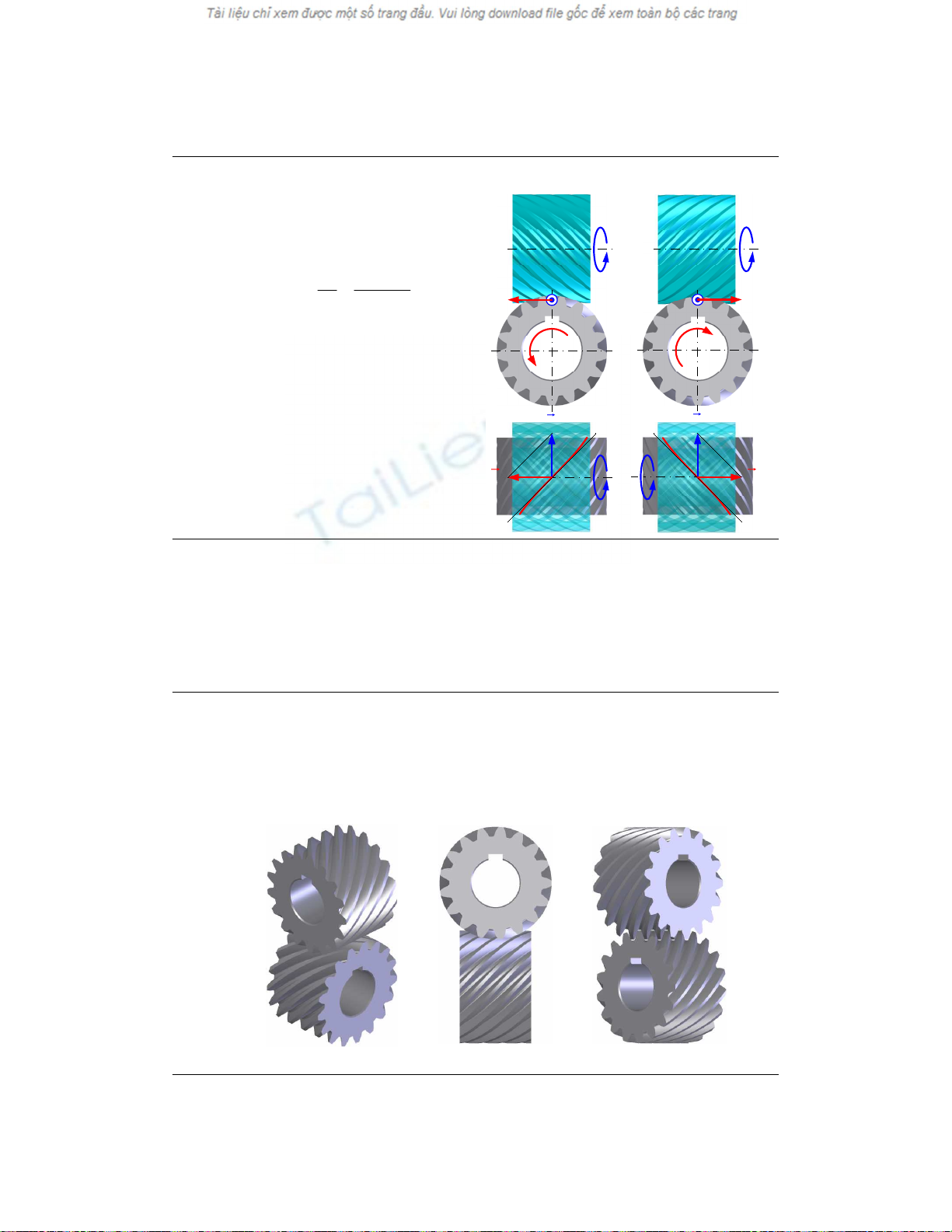
-
-Quan
Quan h
hệ
ệv
vậ
ận
nt
tố
ốc
c
-
-T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
-
-Đi
Điề
ều
uki
kiệ
ện
năn
ăn kh
khớ
ớp
pđ
đú
úng
ng
-
-G
Gọ
ọi
il
là
àmođun
mođun ngang
ngang v
và
às
số
ốrăng
răng
21
,,,
21
zzmm
ss
-
-Thư
Thườ
ờng
ng d
dù
ùng
ng c
cá
ác
cc
cặ
ặp
pb
bá
ánh
nh răng
răng v
vớ
ới
i
δ
δ
=
=
90
90
0
0
2
P
v
r
1
P
v
r
2
p
1
p
t
t
2
p
1
p
P
2
β
1
β
1
β
2
β
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.05
11.05 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§1.
1. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
-
-Ưu
Ưu đi
điể
ểm
m
+
+ C
Có
óth
thể
ểch
chọ
ọn
n4
4 thông
thông s
số
ốđ
để
ểth
thỏ
ỏa
a
mãn
mãn m
mộ
ột
tt
tỉ
ỉs
số
ốtruy
truyề
ền
ncho
cho trư
trướ
ớc
c
+
+ Khi
Khi thi
thiế
ết
tk
kế
ế,
, mu
muố
ốn
nđ
đổ
ổi
ichi
chiề
ều
uquay
quay
c
củ
ủa
am
mộ
ột
tb
bá
ánh
nh trong
trong khi
khi chi
chiề
ều
u
quay
quay c
củ
ủa
ab
bá
ánh
nh còn
còn l
lạ
ại
ikhông
không thay
thay
đ
đổ
ổi
i,
, không
không c
cầ
ần
nthêm
thêm b
bá
ánh
nh răng
răng
trung
trung gian
gian m
mà
àch
chỉ
ỉc
cầ
ần
nđ
đổ
ổi
ig
gó
óc
c
nghiêng
nghiêng c
củ
ủa
arăng
răng sao
sao cho
cho
Đi
Điề
ều
un
nà
ày
yd
dễ
ễth
thự
ực
chi
hiệ
ện
nkhi
khi
δ
δ
= 90
= 90°
°
11
22
2
1
12
cos
cos
β
β
ω
ω
r
r
i==
)(180 21
0
ββδ
+−=
P
t
1
P
v
2
P
v
P
t
t
1
P
v
2
P
v
P
t
P
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.06
11.06 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§1.
1. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
III.
III. Đ
Đặ
ặc
cđi
điể
ểm
mti
tiế
ếp
px
xú
úc
c
-
-C
Cặ
ặp
pb
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
oti
tiế
ếp
px
xú
úc
ctheo
theo đi
điể
ểm
m
-
-T
Tạ
ại
iđi
điể
ểm
mti
tiế
ếp
px
xú
úc
cc
có
óv
vậ
ận
nt
tố
ốc
ctrư
trượ
ợt
ttương
tương đ
đố
ối
inên
nên m
mặ
ặt
trăng
răng mau
mau mòn
mòn v
và
àmòn
mòn
không
không đ
đề
ều
u
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.07
11.07 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§2.
2. C
Cơ
ơc
cấ
ấu
utr
trụ
ục
cv
ví
ít
t–
–b
bá
ánh
nh v
ví
ít
t
I.
I. Đ
Đặ
ặc
cđi
điể
ểm
mc
cấ
ấu
ut
tạ
ạo
o
-
-Cơ
Cơ c
cấ
ấu
utr
trụ
ục
cv
ví
ít
t-
-b
bá
ánh
nh v
ví
ít
tl
là
àcơ
cơ c
cấ
ấu
ub
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
ođ
đặ
ặc
cbi
biệ
ệt
tv
vớ
ới
i
+
+ g
gó
óc
cgiao
giao nhau
nhau gi
giữ
ữa
ahai
hai tr
trụ
ục
c
δ
δ
=
=
β
β
1
1
+
+
β
β
2
2
= 90
= 90°
°→
→truy
truyề
ền
nđ
độ
ộng
ng gi
giữ
ữa
ahai
hai tr
trụ
ục
c
vuông
vuông g
gó
óc
cnhau
nhau
+
+
β
β
1
1
r
rấ
ất
tl
lớ
ớn
n(
(c
có
óth
thể
ểđ
đế
ến
n86
86°
°)
) nên
nên đư
đườ
ờng
ng răng
răng th
thà
ành
nh đư
đườ
ờng
ng xo
xoắ
ắn
nố
ốc
cqu
quấ
ấn
ntrên
trên
m
mặ
ặt
ttr
trụ
ụ.
. S
Số
ốrăng
răng đư
đượ
ợc
cg
gọ
ọi
il
là
às
số
ốm
mố
ối
iren
ren
z
z
1
1
= 1
= 1÷
÷4.
4. B
Bá
ánh
nh răng
răng n
nà
ày
yđư
đượ
ợc
cg
gọ
ọi
i
l
là
àtr
trụ
ục
cv
ví
ít
t,
, b
bá
ánh
nh răng
răng còn
còn l
lạ
ại
iđư
đượ
ợc
cg
gọ
ọi
il
là
àb
bá
ánh
nh v
ví
ít
t
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.08
11.08 Spartial
Spartial Gear Mechanism
Gear Mechanism
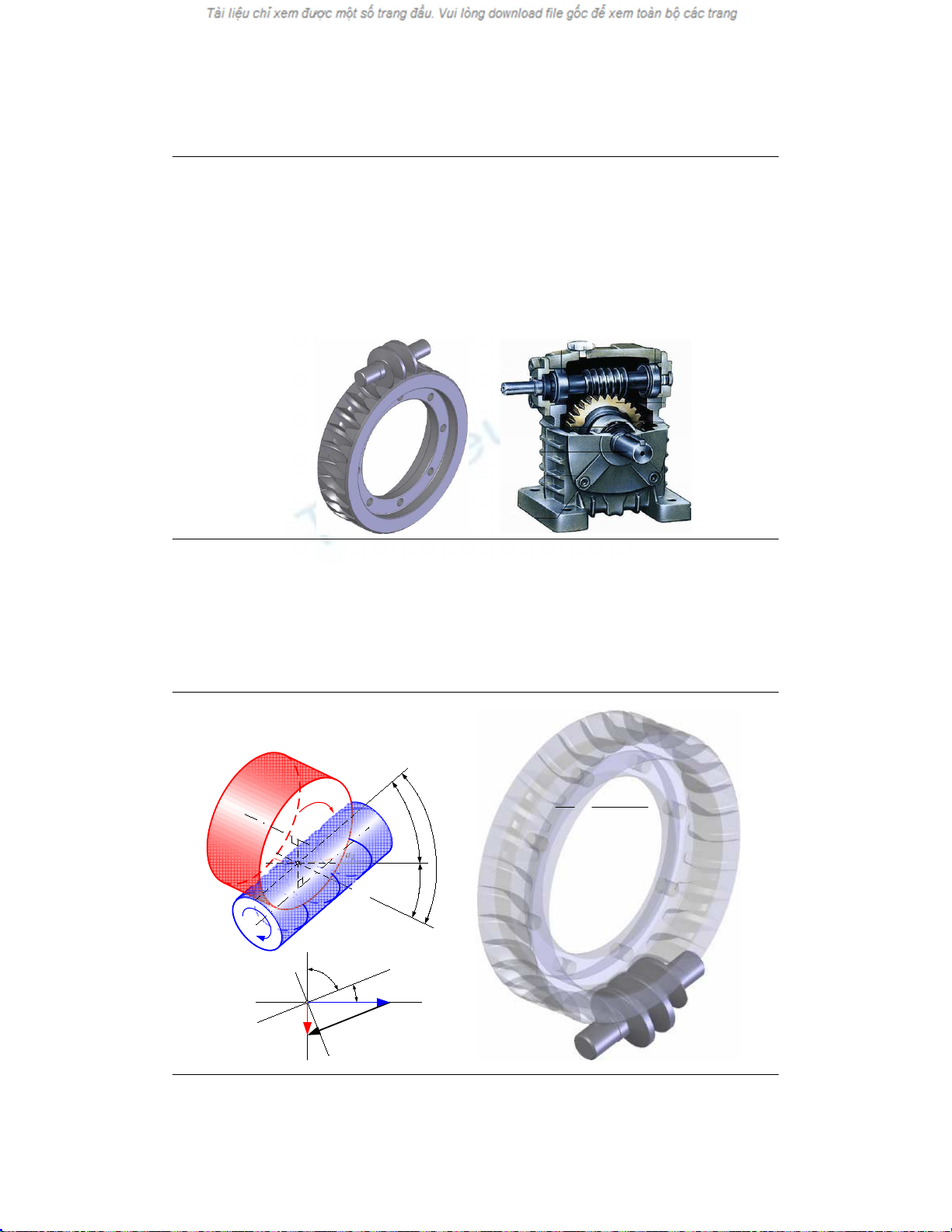
-
-Ưu
Ưu đi
điể
ểm
m:
: V
Vì
ìs
số
ốm
mố
ối
iren
ren (
(
z
z
1
1
)
) í
ít
ttrong
trong khi
khi s
số
ố
răng
răng c
củ
ủa
ab
bá
ánh
nh v
ví
ít
t(
(
z
z
2
2
)
) c
có
óth
thể
ểr
rấ
ất
tnhi
nhiề
ều
unên
nên t
tỉ
ỉ
s
số
ốtruy
truyề
ền
nc
có
óth
thể
ểr
rấ
ất
tl
lớ
ớn
n
§
§2.
2. C
Cơ
ơc
cấ
ấu
utr
trụ
ục
cv
ví
ít
t–
–b
bá
ánh
nh v
ví
ít
t
II.
II. T
Tỉ
ỉs
số
ốtruy
truyề
ền
n
2
P
v
r
1
P
v
r
2
p
1
p
t
t
2
p
1
p
P
1
β
2
β
12
PP
v
r
2
p
1
p
1
a
2
a
t
2
β
1
β
δ
1
p
1
ω
P
1
O
2
O
2
p
1
a
2
a
t
2
ω
11
22
2
1
12 cos
cos
β
β
ω
ω
r
r
i
==
-
-Như
Như c
cặ
ặp
pb
bá
ánh
nh răng
răng tr
trụ
ụch
ché
éo
o
-
-Trong
Trong m
mộ
ột
ts
số
ốtrư
trườ
ờng
ng h
hợ
ợp
p,
, b
bộ
ộtruy
truyề
ền
ntr
trụ
ục
cv
ví
ít
t-
-
b
bá
ánh
nh v
ví
ít
tch
chỉ
ỉtruy
truyề
ền
nđ
độ
ộng
ng theo
theo m
mộ
ột
tchi
chiề
ều
ut
từ
ừ
tr
trụ
ục
cv
ví
ít
tđ
đế
ến
nb
bá
ánh
nh v
ví
ít
t(
(t
tự
ựhãm
hãm theo
theo chi
chiề
ều
u
ngư
ngượ
ợc
cl
lạ
ại
i)
)
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.09
11.09 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§2.
2. C
Cơ
ơc
cấ
ấu
utr
trụ
ục
cv
ví
ít
t–
–b
bá
ánh
nh v
ví
ít
t
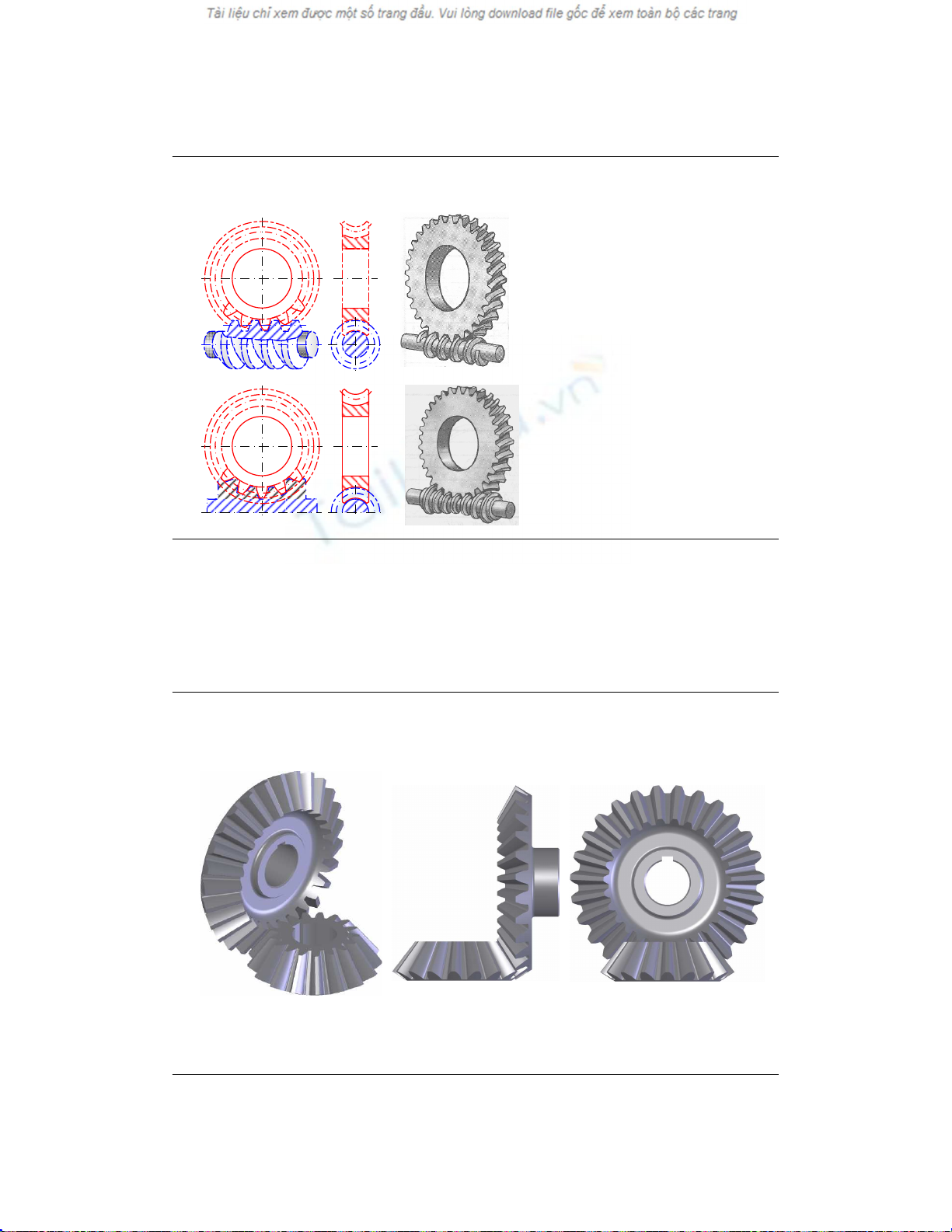
III.
III. Đ
Đặ
ặc
cđi
điể
ểm
mti
tiế
ếp
px
xú
úc
c
-
-B
Bộ
ộtruy
truyề
ền
ntr
trụ
ục
cv
ví
ít
t-
-b
bá
ánh
nh v
ví
ít
tti
tiế
ếp
p
x
xú
úc
ctheo
theo đi
điể
ểm
mv
và
àc
có
óv
vậ
ận
nt
tố
ốc
ctrư
trượ
ợt
t
-
-V
Vậ
ận
nt
tố
ốc
ctrư
trượ
ợt
tc
củ
ủa
ab
bộ
ộtruy
truyề
ền
ntr
trụ
ục
c
v
ví
ít
t-
-b
bá
ánh
nh v
ví
ít
tr
rấ
ất
tl
lớ
ớn
nnên
nên mau
mau mòn
mòn
,
,
ma
ma s
sá
át
tl
lớ
ớn
n,
, hi
hiệ
ệu
usu
suấ
ất
tth
thấ
ấp
p
→
→Đ
Để
ểkh
khắ
ắc
cph
phụ
ục
c,
, ngư
ngườ
ời
ita
ta thay
thay đ
đổ
ổi
i
c
cấ
ấu
ut
tạ
ạo
oc
củ
ủa
ab
bá
ánh
nh v
ví
ít
t
+
+ b
bá
ánh
nh v
ví
ít
tlõm
lõm:
: răng
răng c
củ
ủa
ab
bá
ánh
nh v
ví
ít
t
ở
ởtrên
trên m
mặ
ặt
ttr
trụ
ụtròn
tròn xoay
xoay m
mà
à
đư
đườ
ờng
ng sinh
sinh l
là
àcung
cung tròn
tròn sao
sao
cho
cho b
bá
ánh
nh v
ví
ít
tôm
ôm l
lấ
ấy
ytr
trụ
ục
cv
ví
ít
t
+
+ tr
trụ
ục
cv
ví
ít
tlõm
lõm (
(tr
trụ
ục
cv
ví
ít
tgloboit
globoit):
):
tr
trụ
ục
cv
ví
ít
tôm
ôm l
lấ
ấy
yb
bá
ánh
nh v
ví
ít
t
HCM City Univ. of Technology, Mechanical Engineering Department
HCM City Univ. of Technology, Mechanical Engineering Department Nguyen Tan Tien
Nguyen Tan Tien
Theory of Machine
Theory of Machine 11.10
11.10 Spartial
Spartial Gear Mechanism
Gear Mechanism
§
§3.
3. C
Cơ
ơc
cấ
ấu
ub
bá
ánh
nh răng
răng n
nó
ón
n
![Bộ câu hỏi sát hạch cấp chứng chỉ hành nghề kiến trúc [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260514/hoahongxanh0906/135x160/13061779155952.jpg)

















![Gia Công & Lắp Đặt Cốt Thép: Kỹ Thuật Xây Dựng Bê Tông [Chuẩn Nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/58891780257145.jpg)
![Gia Công Ván Khuôn: Lắp Dựng, Tháo Dỡ và Kỹ Thuật Xây Dựng [Chi Tiết A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/4261780257147.jpg)

![Giáo Trình Công Tác Xây Dựng: Kỹ Thuật và Vật Liệu Xây Dựng [A-Z]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260531/alfredodistefano10/135x160/9351780261637.jpg)



%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)