
1
TRƯỜNG ĐẠI HỌC HÀNG HẢI VIỆT NAM
KHOA/ VIỆN: ĐIỆN – ĐIỆN TỬ
THUYẾT MINH
ĐỀ TÀI NCKH CẤP TRƯỜNG
ĐỀ TÀI
NGHIÊN CỨU HỆ THỐNG ĐIỀU KHIỂN MẠNG
PLC – NHIỀU BIẾN TẦN – ĐỘNG CƠ KHÔNG ĐỒNG BỘ BA
PHA CHO HỆ THỐNG TRUYỀN ĐỘNG NHIỀU ĐỘNG CƠ CÓ
LIÊN KẾT CƠ KHI CỨNG.
Chủ nhiệm đề tài: Th.S. HỨA XUÂN LONG
Thành viên tham gia: PGS. TS. HOÀNG XUÂN BÌNH
Th.S TRẦN TIẾN LƯƠNG
Hải Phòng, tháng 4 /2016
2
MỞ ĐẦU
1. Tính cần thiết của đề tài
Trong các lĩnh vực công nghiệp mạng truyền thông đã phát triển và chiếm ưu
thế.Hệ thống truyền động kết hợp giữa động cơ không đồng bộ - biến tần ngày
các được áp dụng rộng rãi trong công nghiệp. Truyền thông giữa PLC – biến tần
– động cơ không đồng bộ ba pha dần trở thành kết nối tiêu chuẩn của hệ thống
vì nó giảm thiểu độ phức tạp của sơ đồ kết nối mà vẫn đảm bảo độ chính xác
trong điều khiển các thông số.
Điều khiển biến tần thông qua mạng Profibus, đối với loại MM3, MM4 của
Siemens đã có sẵn giao diện Profibus trên RS458 Port. Nhưng đối với các ứng
dụng nhỏ thì việc thiết kế một mạng Profibus sẽ đưa giá thành lên cao, do đó
không kinh tế. Trong các trường hợp này, giải pháp là sư dụng mạng này gọi là
mạnh USS với kết nối điểm (Poin to Point). Ta có thể điều khiển toàn bộ chức
năng của biến tần thông qua mạng này, ngoài ra còn có thể giám sát được dòng
điện, điện áp, tốc độ, chiều quay..dựa vào các vùng nhớ của PLC dành riêng cho
mỗi biến tần. Chi phí cho mạng là thấp và tối ưu nhất cho các ứng dụng nhỏ và
vừa.
Làm việc trong môi trường yêu cầu cao về nghiên cứu, việc tiếp cận đến các
lý thuyết điều khiển để nâng cao chất lượng, đưa ra những giải pháp điều khiển,
xây dựng các mô hình minh chứng lý thuyết và bài toán thực tế, tác giả đã lựa
chọn đề tài “NGHIÊN CỨU HỆ THỐNG ĐIỀU KHIỂN MẠNG PLC –
NHIỀU BIẾN TẦN – ĐỘNG CƠ KHÔNG ĐỒNG BỘ BA PHA CHO HỆ
THỐNG TRUYỀN ĐỘNG NHIỀU ĐỘNG CƠ CÓ LIÊN KẾT CƠ KHI
CỨNG.’’
2. Mục đích nghiên cứu
Nghiên cứu về hệ thống PLC - biến tần - động cơ không đồng bộ ba pha cùng
quay chung một mômen cản. Các động cơ có liên kết cứng thông qua hệ thống
bánh răng và thanh răng.
Nghiên cứu xây dựng hệ thống điều khiển được viết cho PLC S7-1200 và
được kết nối với PC thông qua phần mềm TIA PORTAL
3. Đối tượng và phạm vi nghiên cứu

3
Nghiên cứu lý thuyết và tiến hành thực nghiệm trên một mô hình đơn giản.
4. Phương pháp nghiên cứu
Sử dụng các phương pháp phân tích, tổng hợp và suy luận, suy diễn trong việc
xây dựng cương trình điều khiển.Sử dụng các phương pháp thực nghiệm để
kiểm tra kết quả.
5. Ý nghĩa khoa học và thực tiễn của đề tài
Về ý nghĩa khoa học: Đề tài đóng góp cho việc xây dựng các hệ thống điều
khiển biến tần qua mạng truyền thông.
Về ý nghĩa thực tiễn: Việc thực nghiệm thành công điều khiển mạng biến tần
cho phép áp dụng vào các hệ thống thực tế. Kết quả của đề tài cũng được ứng
vào xây dựng các hệ thống sản xuất thực trong công nghiệp.
4
CHƯƠNG 1: HỆ TRUYỀN ĐỘNG ĐIỆN LIÊN KẾT CƠ KHÍ CỨNG
1.1. Quan hệ giữa vận tốc chuyển động dài và chuyển động quay
1.1.1. Vectơ vận tốc trong chuyển động cong
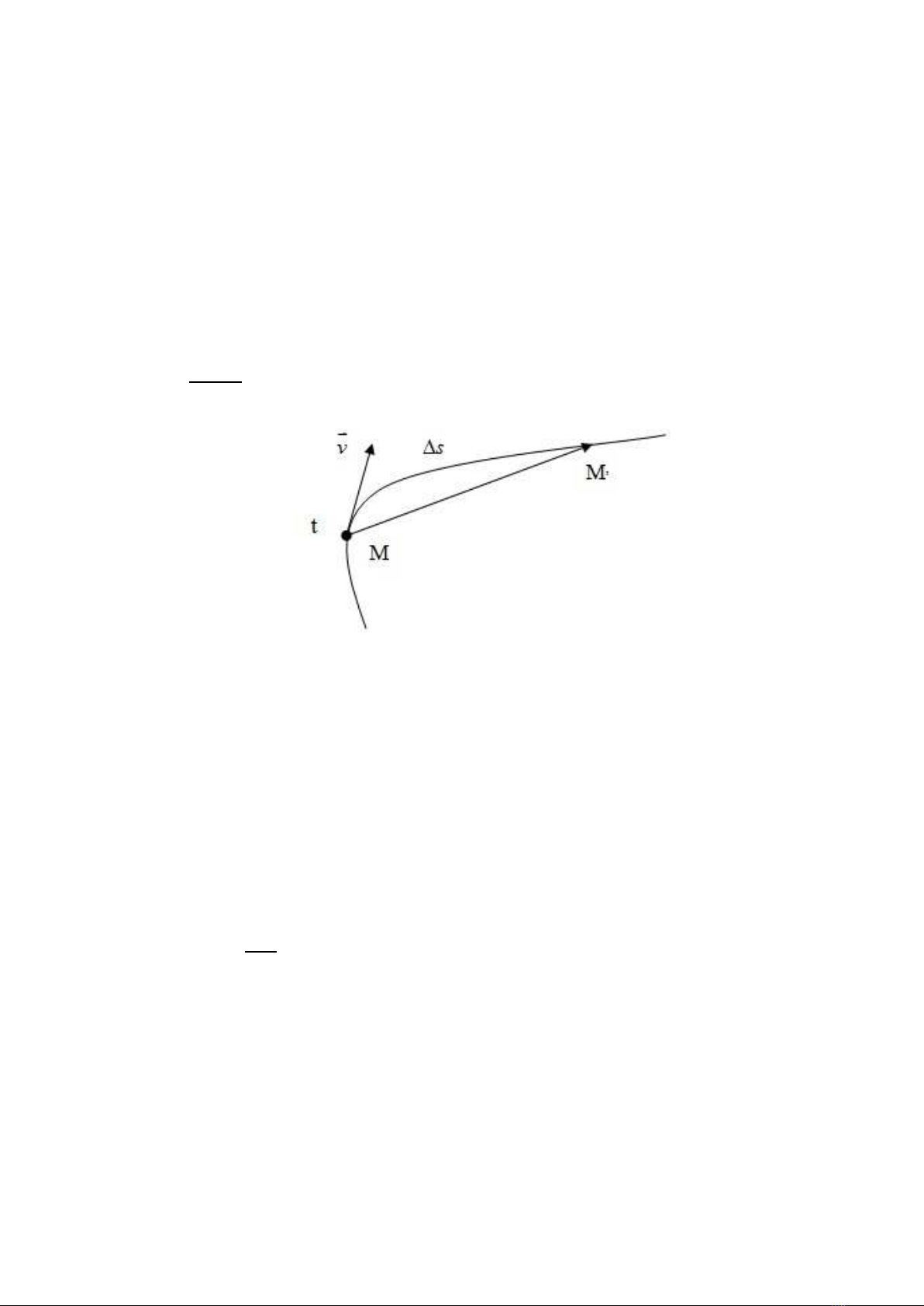
Khi một vật thể chuyển động theo một đường cong, vectơ của vận tốc chuyển
động luôn luôn thay đổi hướng. Trong một khoảng thời gian nghiên cứu là Δt,
vật thể di chuyển từ điểm M đến điểm M’. Vectơ vận tốc trung bình của vật thể
trong khoảng thời gian đó được xác định theo (1.1) và được thể hiện trên hình
1.1
'(1.1)
tb
MM
vt
=D
uuuur
uur
Hình 1.1. Mô tả chuyển động của vật thể
Trong khoảng thời gian Δt rất nhỏ thì điểm M’ rất gần M. Phương của
rất gần với tiếp tuyến tại M,độ lớn của rất gần với độ dài cung đường đi
được Δs. Như vậy ta có nhận xét rằng, khiΔtrất nỏ thì vectơ vận tốc trung bình
trở thành vectơ vận tốc tức thời v tại thời điểm t. Vectơ vận tốc tức thời có
phương trùng với tiếp tuyến của quỹ đạo tại M, cùng chiều với chiều chuyển
động và có độ lớn là:
(1.2)
tb
s
vt
D
=D
uur
1.1.2. Vectơ vận tốc trong chuyển động tròn đều.
Chuyển động tròn đều khi đối tượng di chuyển được những góc tròn có
độ dài bằng nhau trong những khoảng thời gian bằng nhau t. Nếu ta gọi Δs là độ
dài cung tròn mà dối tượng đã đi được trong khoảng thời gian làΔt.Tại một
điểm nào đó bất kỳ trên đường tròn, vectơ vận tốc
v
r
của đói tượng nghiên
5
cứucó phương trùng với tiếp tuyến và có chiều trùng chiều của chuyển động.
Độ lớn của vectơ vận tốc
v
r
là
onst
s
vc
t
D
==
D
1.1.3. Chu kì và tần số của chuyển động tròn đều
Nếu ta gọi T là khoảng thời gian chất điểm đi hết một vòng trên đường
tròn. Từ công thức xác định giá trị của
v
r
thì khi đó ta sẽ có
2(1.3)
R
Tv
p
=
Trong công thức (1.3) thì R là bán kính đường tròn, khi giá trị của v không đổi
thì khi đó T là một hằng số được gọi là chu kì.Tần số f của chuyển động tròn
đều là số vòng mà đối tượng chuyển động được trong khoảng thời gian là một
giây và có giá trị là
1
fT
=
.
1.1.4. Tốc độ góc, liên hệ giữa tốc độ góc và tốc độ dài
Khi đối tượng di chuyển được một quãng đường M0M=Δs thì bán kính OM0của
nó quét được một góc làΔφ , quãng đường mà đối tượng di chuyển được xác
định theo biểu thức
. (1.4)sRjD=
Trong đó R là bán kính của đường tròn.Đơn vị tính của Δφ bằng rađian
(rad). Tỉ số giữa góc quét Δφ và khoảng thời gian Δt mà đối tượng di chuyểnlà
tốc độgóc
t
j
wD
=D
. Tốc độ góc đo bằng rađian trên giây (rad/s). Ta có mối
quan hệ giữa tốc độ góc và vân tố chuyển động dài của đối tượng như sau:
. (1.5)vRw=
1.2. Quan hệ giữa tốc độ quay của động cơ và tốc độ chuyển động
Trong thực tế sản xuất ta thường gặp các hệ truyền động điện có liên kết cơ
khí cứng. Nhiều động cơ điện không đồng bộ ba pha (hoặc là các động cơ điện
một chiều) cùng quay chung một cơ cấu (có thể là chuyển động quay hoặc
chuyển động thẳng). Khi sử dụng nhiều động cơ điện cùng quay một đối tượng

![Bài tập lớn nồi hơi - tua bin hơi tàu thủy [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250804/kimphuong1001/135x160/51011754302684.jpg)
![Thiết kế hộp giảm tốc hai cấp: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/vijiraiya/135x160/99241753869588.jpg)


















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)