1
TRƯỜNG ĐẠI HỌC HÀNG HẢI VIỆT NAM
KHOA: ĐIỆN – ĐIỆN TỬ
ĐỀ TÀI NGHIÊN CỨU:
NÂNG CAO CHẤT LƯỢNG HỆ TỰ ĐỘNG PHÂN CHIA TẢI
CHO 2 DIESEL CHÍNH LÀM VIỆC SONG SONG
BẰNG VIỆC ỨNG DỤNG BỘ LỌC TÍN HIỆU
ĐỀ TÀI NGHIÊN CỨU: CẤP TRƯỜNG
CHỦ NHIỆM ĐỀ TÀI: PGS.TS Lưu Kim Thành
Các thành viên tham gia: Th.S Đỗ Văn A
Th.S Nguyễn Xuân Trụ
HẢI PHÒNG 04/2016
2
MỤC LỤC
NỘI DUNG
TRANG
I. MỞ ĐẦU
1
II. NỘI DUNG
3
Chương 1. NHIỆM VỤ CHUNG KHI PHÂN CHIA TẢI
CHO CÁC DIESEL LÀM VIỆC SONG SONG
3
1. 1. Đặt vấn đề
3
1.2. Nguyên tắc chung để thực hiện phân chia tải giữa các Diesel làm
việc song song.
3
1.3. Thuật toán và cấu hình các khâu phục vụ cho việc phân chia tải
7
Chương 2. KẾT QUẢ MÔ PHỎNG QUÁ TRÌNH TỰ ĐỘNG PHÂN
CHIA TẢI GIỮA HAI DIESEL LAI CHUNG CHÂN VỊT
15
2.1. Tính chọn các tham số của hệ Diesel – chân vịt
15
2.2. Mô phỏng dùng tín hiệu Mc của hai Diesel
16
2.3. Mô phỏng dùng tín hiệu ra của bộ điều chỉnh Ur
27
2.4. Quá trình khởi động và cân bằng tải của 2 Diesel khác thời điểm
32
2.5. Quá trình khởi động và phân tải không cân bằng của 2 Diesel khác
thời điểm
39
2.6. Quá trình tự động cân bằng tải khi thay đổi tín hiệu đặt trước tốc độ
41
KẾT LUẬN
43
TÀI LIỆU THAM KHẢO
44

3
I. MỞ ĐẦU
1. Đặt vấn đề.
Trên các tàu thuỷ thường được trang bị động cơ lai chân vịt chính hầu hết là
sử dụng một hoặc hai động cơ Diesel. Khi sử sụng hai Diesel lai chung một chân
vịt thì việc phân chia tải giữa chúng laic rất cần thiết. Bởi vì trong quá trình làm
việc song song có thể xảy ra hiện tượng tranh cướp tải của nhau, hoặc thậm trí
Diesel này trở thành tải của Diesel kia. Khi đó sẽ xảy ra hiện tượng quá tải cho một
Diesel, vốn dĩ Diesel là đối tượng có hệ số quá tải thấp nên dẫn tới rời khỏi công
tác song song giữa chúng. Mặt khác việc khai thác hợp lý hai Diesel lai chung một
chân vịt luôn được người vận hành quan tâm. Vì thông số của chúng chưa chắc đã
được giữ như nhau tuy cùng chủng loại (cùng nhãn mác).
Trên thế giới nhiều hãng đã chế tạo thành công các hệ thống điều khiển tự
động phân chia tải giữa 2 Diesel lai chung một chân vịt theo tín hiệu mô men cản
(MC ) [6], hoặc theo tín hiệu ra (UR) từ 2 bộ điều tốc điện tử [7], [8].
Trong nước chưa có nhà máy nào chế tạo hệ thống điều khiển tự động phân
chia tải giữa 2 Diesel lai chung một chân vịt. Các công trình nghiên cứu còn ít, ở
trường đại học Hàng hải Việt Nam có 2 công trình nghiên cứu vấn đề này [1] và
[5]. Kết quả nghiên cứu quá trình tự động phân chia tải theo tín hiệu MC và theo UR
đã được trình bày trong [1]. Cũng theo [1] cho thấy khả năng điều khiển theo tín
hiệu ra từ 2 bộ điều chỉnh tốc độ có dạng PID cũng gặp điều bất lợi về đặc tính tín
hiệu ra của chúng theo thời gian thường có dạng bất thường (phi chu kỳ, biên độ
không đều và có biến động lớn). Hai tín hiệu ra dạng đó gây khó khăn cho việc so
sánh lựa chọn theo thuật toán cực đại [1] trong khối tự động phân chia tải. Để giải
quyết khó khăn này cần thiết phải xử lý dạng tín hiệu ra UR của 2 bộ điều chỉnh tốc
độ nhờ mạch lọc thông thấp (LPF).
Xuất phát từ nhu cầu nâng cao chất lượng điều khiển tự động phân chia tải
giữa hai động cơ Diesel lai một chân vịt chính trên tàu thuỷ mà nhóm tác giả chọn
hướng đề tài: “ Nâng cao chất lượng hệ tự động phân chia tải cho 2 Diesel chính
làm việc song song bằng việc ứng dụng bộ lọc tín hiệu.”
4
2. Mục đích của đề tài.
Nghiên cứu lựa chọn bộ lọc dùng để xử lý tín hiệu ra của hai bộ điều tốc
nhằm nâng cao chất lượng điều khiển tự động phân chia tải giữa hai động cơ
Diesel công tác song song lai một chân vịt chính trên tàu thuỷ.
3. Phương pháp nghiên cứu của đề tài.
- Thông qua việc phân tích dạng quá độ UR của bộ điều chỉnh tốc độ trong
hệ điều khiển tự động phân chia tải giữa hai động cơ Diesel công tác song song,
tiến hành lựa chọn mạch lọc đơn giản và phù hợp cho việc ứng dụng sau này;
- Sử dụng phần mềm Simuling / Matlab để mô phỏng quá trình sử lý tín hiệu
ra của bộ điều tóc bằng một vài bộ lọc thông thấp (LPF) với các thông số khác
nhau. Lựa chọn thông số phù hợp cho việc xử lý tín hiệu ra của bộ điều tốc.
- Đưa ra các đánh giá về từng loại bộ lọc thông thấp được nghiên cứu và đưa
ra quyết định lựa chọn mô hình bộ lọc LPF cho hệ thống tự động phân chia tải giữa
2 Diesel lai chung một chân vịt. Cuối cùng nghiên cứu hệ với bộ lọc LPF trên
Simuling / Matlab để đưa ra kết luận.
4. Ý nghĩa khoa học và thực tiễn của đề tài.
- Đề tài thực hiện thành công sẽ là cơ sở lý luận hỗ trợ cho việc nghiên cứu
thiết kế chế tạo hệ thống điều khiển tự động phân chia tải giữa các động cơ Diesel
công tác song song lai một chân vịt chính trên tàu thuỷ.
- Đồng thời cũng góp phần nâng cao kỹ năng sử dụng khai thác hệ thống
điều khiển từ xa và tự động phân chia tải cho 2 Diesel công tác song song lai một
chân vịt chính tàu thuỷ.
- Nội dung nghiên cứu không chỉ mang tính chất là tài liệu tham khảo cho
cán bộ KHKT, mà còn góp phần hỗ trợ cho SV tìm hiểu sâu về vấn đề tự động
phân chia tải cho 2 Diesel công tác song song.
5
II. NỘI DUNG
Chương 1. BỘ LỌC TIN HIỆU
1.1. Khái quát bộ lọc (Filter)
1.1.1/ Chức năng của bộ lọc:
Bộ lọc có nhiệm vụ loại bỏ đi những gì mà chúng ta không cần thiết. Trong
các hệ thống kiểm tra, đo lường, điều khiển chúng ta thường thấy bộ lọc làm nhiệm
vụ loại bỏ các nhiễu ảnh hưởng đến kết quả đo lường, điều khiển. Tuy nhiên mong
muốn loại bỏ hoàn toàn ảnh hưởng của nhiễu là không thể (bởi vì nhiễu bao gồm
nhiều sóng hài với dải tần số rộng), mà chỉ có thể là giảm thiểu được ảnh hưởng do
nhiễu sinh ra. Ngoài ra bộ lọc còn có chức năng khác trong lĩnh vực sử dụng tín
hiệu, đó là loại bỏ đi các dữ liệu không cần thiết, hoặc không có lợi cho quá trình
sử lý tín hiệu.
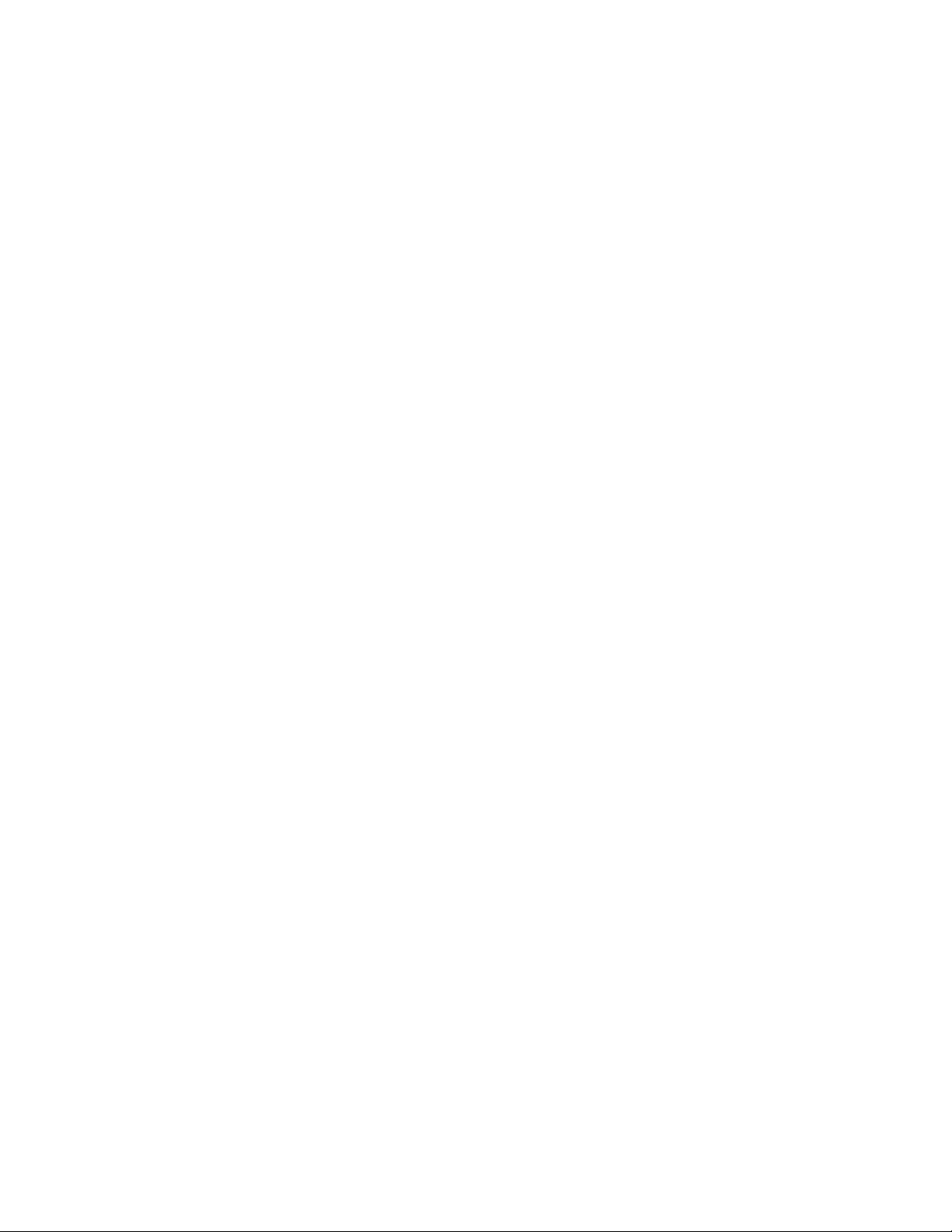
Trong quá trình điều khiển thì tín hiệu ra của bộ điều khiển PID thường có
dạng đặc tính bất thường (phi chu kỳ, biên độ không đều và có biến động lớn) như
trong [1] giới thiệu trên hình 1.1. Với các tín hiệu ra của bộ điều khiển khi có dạng
biến động bất thường như vậy sẽ gây trở ngại lớn cho việc điều khiển, nhất là khi
cần thực hiện việc tự động phân chia tải cho các đối tượng làm việc song song. Do
vậy khi này cần thiết sử dụng bộ lọc phù hợp để tạo ra đặc tính có dạng đơn giản
hơn, dễ sử dụng hơn.
Hình 1.1. Dạng tín hiệu ra của 1 bộ điều khiển PID
khi thực hiện phân chia tải giữa 2 Diesel lai chung 1 tải.




![Đồ án động cơ xăng GDI: Môn học chi tiết [Kèm tài liệu]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/vijiraiya/135x160/41751753869583.jpg)

![Tính toán sức kéo ô tô: Bài tập lớn [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250730/kimphuong1001/135x160/39061753859731.jpg)

















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)