
BÁO CÁO Đ TÀI THI T K K THU T V PIC16F877AỀ Ế Ế Ỹ Ậ Ề
ĐO NHI T Đ DÙNG LM35, HI N TH LÊN LCDỆ Ộ Ể Ị
L i nói đ uờ ầ .
Th k 21 m ra m t th i đ i m i, th i đ i khoa h c công ngh đòi h i con ng i luôn luônế ỉ ở ộ ờ ạ ớ ờ ạ ọ ệ ỏ ườ
không ng ng tìm tòi h c h i đ phát tri n và ti n b . V i s nh y v t c a khoa h c, kĩ thu t đi nừ ọ ỏ ể ể ế ộ ớ ự ả ọ ủ ọ ậ ệ
đi n t mà vì th trong m t th i gian ng n nó đã đ t đ c nh ng thành t u to l n trong h u h t cácệ ử ế ộ ờ ắ ạ ượ ữ ự ớ ầ ế
lĩnh v c trong đ i s ng xã h i. Thi t b và công ngh ngày càng đ i m i đ góp ph n nâng cao ch tự ờ ố ộ ế ị ệ ổ ớ ể ầ ấ
l ng cu c s ng. Ngày nay các thi t b vi đi u khi n có ng d ng càng r ng rãi v i u đi m nhượ ộ ố ế ị ề ể ứ ụ ộ ớ ư ể ỏ
g n, linh ho t và có th đi u khi n đ c r ng rãi. Vi đi u khi n càng ngày càng chi m lĩnh và đóngọ ạ ể ề ể ượ ộ ề ể ế
vai trò c c kì quan tr ng trong kĩ thu t đi u khi n và t đ ng hóa.ự ọ ậ ề ể ự ộ
Gi đây v i nhu c u chuyên d ng hóa, t i u ( th i gian , không gian, giá thành) bao m t, tínhờ ớ ầ ụ ố ư ờ ậ
ch đ ng linh ho t trong công ngh …ngày càng đòi h i kh t khe vi c đ a ra công ngh m i trongủ ộ ạ ệ ỏ ắ ệ ư ệ ớ
lĩnh v c ch t o m ch đi u khi n đi n t đ đáp úng các nhu c u c p thi t trong khoa h c kĩ thu tự ế ạ ạ ề ể ệ ử ể ầ ấ ế ọ ậ
đi n – đi n t .ệ ệ ử
Kĩ thu t vi đi u khi n hi n nay r t phát tri n, nó đáp ng đ c nhu c u c a nhi u ngành, lĩnhậ ề ể ệ ấ ể ứ ượ ầ ủ ề
v c s n xu t công nghi p, t đ ng hóa, trong đ i s ng …So v i kĩ thu t s thì kĩ thu t vi đi u khi nự ả ấ ệ ự ộ ờ ố ớ ậ ố ậ ề ể
nh g n h n do đó nó đ c tích h p l i và có kh năng l p trình đ đi u khi n nên ti n d ng và cỏ ọ ơ ượ ợ ạ ả ậ ể ề ể ệ ụ ơ
đ ng.V i các tính ch t u vi t đó trong đ tài này nhóm chúng em s dugnj vi đ u khi n đ đo nhi tộ ớ ấ ư ệ ề ử ề ể ể ệ
đ và đòng th i hi n th LCD.ọ ờ ể ị
Đ tài đ c thi t k d a trên ki n th c đã h c, sách tham kh o và m t s ngu n tài li u khác.ề ượ ế ế ự ế ứ ọ ả ộ ố ồ ệ
Tuy nhiên do th i gian và trình đ có h n nên chúng em không tránh kh a nh ng sai sót. Vì v y mongờ ọ ạ ỉ ữ ậ
th y và các b n góp ý xây d ng, giúp đ đ hoàn thi n h n đ tài.ầ ạ ự ỡ ể ệ ơ ề
Chúng em xin chân thành c m n!ả ơ
Nhóm 1

PH N M Đ UẦ Ở Ầ
T NG QUAN V ĐI U KHI N NHI T Đ TRONG CU C S NG.Ổ Ề Ề Ể Ệ Ộ Ộ Ố
Nhi t đ là m t đ i l ng v t lý g n li n v i cu c s ng c a chúng ta. Nó tác đ ng đ n m iệ ộ ộ ạ ượ ậ ắ ề ớ ộ ố ủ ộ ế ọ
m i m t c a đ i s ng. Và trong các lĩnh v c s n xu t cũng v y, nhi t đ nh h ng tr c ti p t iọ ặ ủ ờ ố ự ả ấ ậ ệ ộ ả ưở ự ế ớ
quá trình v n hành, s n xu t.ậ ả ấ
Trong lĩnh v c s n xu t công nghi p nhi t đ có tác đ ng tr c ti p đ n ch t l ng s n ph nự ả ấ ệ ệ ộ ộ ự ế ế ấ ượ ả ẩ
đ u ra nh trong quá trình gia công hàn v t li u nhi t đ nh h ng t i đ chính xác, tính giãn nầ ư ậ ệ ệ ộ ả ưở ớ ộ ở
nhi t c u v t li u. Trong quá trình nung, s y nh nung g ch mem thì nhi t d nh h ng t i ch tệ ả ậ ệ ấ ư ạ ệ ộ ả ưở ớ ấ
l ng v đ c ng,đ d o,màu s c c u s n ph m đ u ra. Trong y h c nhi t đ nh h ng t i cácượ ề ọ ứ ọ ẻ ắ ả ả ẩ ầ ọ ệ ộ ả ưở ớ
k t qu nghiên c u, ch a b nh. Trong cu c s ng nhi t đ nh h ng t i ch t l ng và b o qu nế ả ứ ữ ệ ộ ố ệ ộ ả ưở ớ ấ ượ ả ả
l ng th c, th c ph m. Trong nông nghi p cũng v y nhi t đ nh h ng tr c ti p t i thành qu vàươ ự ự ẩ ệ ậ ệ ộ ả ưở ụ ế ớ ả
năng su t nông nghi p…. V i các y u c u đó nhóm chúng em xin thiêt k đ tài n đ nh nhi t đ v iấ ệ ớ ế ầ ế ề ổ ị ệ ộ ớ
kho n nhi t d n đ nh và đi u khi n là 0 đ n 60 đ C dùng c m bi n LM35, s d ng b vi đi uả ệ ộ ổ ị ề ể ế ộ ả ế ử ụ ộ ề
khi n PIC16F877A =, hi n th LCD.ể ể ị
u đi m: C m bi n LM 35 là m t lo i c m bi n nhi t có ái thành t ng đ i r và bán nhi uƯ ể ả ế ộ ạ ả ế ệ ươ ố ẻ ề
trên th tr ng, có kho ng đo nhi t d phù h p v i yêu c u c a đ tài. PIC16F877A là m t lo i chipị ườ ả ệ ộ ợ ớ ầ ủ ề ộ ạ
vi đi u khi n kh trình có th dùng mã ngu n m , nó có u đi m v giá thành t ng đ i r , đi uề ể ả ể ồ ở ư ể ề ươ ố ẻ ề
khi n n đ nh và khá chính xác và khá ph bi n trên th tr ng.ể ổ ị ổ ế ị ườ
V i đ tài lò p trúng thì yêu c u n đ nh nhi t đ là r t quan tr ng t i vi c thành công hayớ ề ấ ầ ẩ ị ệ ộ ấ ọ ớ ệ
không c a quá trinh p. Theo yêu c u thì nhi t đ trong lò phait đ m bào chênh l ch 2°C so v i nhi tủ ấ ầ ệ ộ ả ệ ớ ệ
đ yêu c u.ộ ầ
Nguyên lý hoạt động của các máy ấp trứng trên th ịtrường.
Các máy p tr ng t đ ng 100% đ c điấ ứ ự ộ ượ ều khi n b i m t module đi u khi n chính. Moduleể ở ộ ề ể
này nh n thông tin ho t đ ng t module c m bi n nhi t , sau đó phát tín hi u đi u khi n module c pậ ạ ộ ừ ả ế ệ ệ ề ể ấ
nhi t. ngoài ra máy pệ ấ tr ng còn có thêm module đ t nhi t đ p tr ng, thứ ặ ệ ộ ấ ứ ờ i gian ptr ng- M t sấ ứ ộ ố
máy p tr ng sau :ấ ứ
a.Mấy ấp trứ ng GTL -1000
Máy p tr ng GTL -1000 :t đ ng hoàn toàn 100% , công xu t t i đa 1000 tr ng,đ oấ ứ ự ộ ấ ố ứ ả tr ngứ tự
đ ng (chộ ế đ h n giộ ẹ ờ ), phun m và nhi t đ tuỳ chình t đ ng đóng khi qua con s quy đ nhẩ ệ ộ ự ộ ố ị
−Đi n áp : 220V ACệ
−Công su t tiêu th :10kw / 1 kỳ pấ ụ ấ

Kết cấu :
−Phun m :Tuỳ ch nh , t đ ng đóng ng t khi quá % quy đ nhẩ ỉ ự ộ ắ ị
−H th ng cung cệ ố ấp nhi t :Bóng nhiêt halozen chuyên dùng cho p tr ngệ ấ ứ
−Đ o Tr ng :T ch n h n giả ứ ự ọ ẹ ờ t 30 Phút - 120 Giừ ờ .
−Nhi t đ đ cệ ộ ượ đi u khi n t đ ng, n đ nh b ng vi x lý.ề ể ự ộ ổ ị ằ ử
−T o đ m t đ ngạ ộ ấ ự ộ
−Đ o tr ng t đ ng (có th tuỳch n thả ứ ự ộ ể ọ ờ i gian đ o t 1 giả ừ ờ - 120 giờ )
−Có th p theo ch đ đa kỳ(m i tu n vào tr ng m t l n) ho c đ n kỳể ấ ế ộ ỗ ầ ứ ộ ầ ặ ơ
b.Máy ấp trứng OXY GTL 240K
Là lo i máy pạ ấ tr ng đ oứ ả tr ngứ b ng khí-Đi n áp : 220VAC Công suằ ệ ất tiêu th : 2kw đi n / 1 kỳụ ệ
p.ấ
- H th ngệ ố c p nhi tấ ệ :đi nệ trở
- Nhi t đ đ c điệ ộ ượ ều khi nể t đ ng b ng vi xự ộ ằ ửlý- T đự ộng tr n khí oxy- Có thộ ể p theo ch đ đaấ ế ộ
kỳ, ho c đ n kỳ.ặ ơ
Hình nh m t s lò âp trên th tr ng:ả ộ ố ị ườ

PH N 1 : GI I THI U CÁC LINH KI NẦ Ớ Ệ Ệ
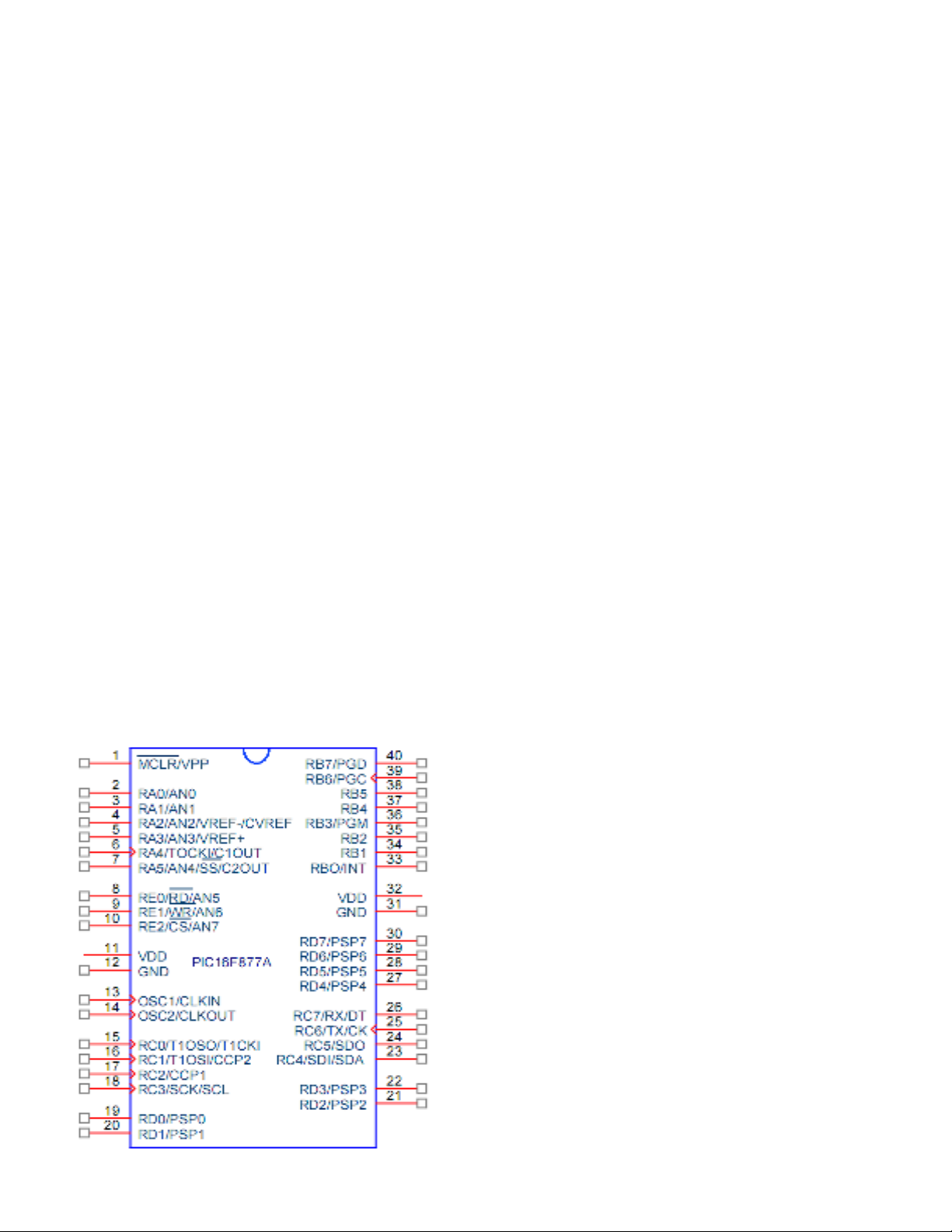
I. PIC16F877A
PIC 16F877A là dòng PIC ph bi n nh t hi n nay (đ m nh v tính năng, 40 chân, b nh đ choổ ế ấ ệ ủ ạ ề ộ ớ ủ
h u h t các ng d ng thông th ng). C u trúc t ng quát c a PIC 16F877A nh sau: ầ ế ứ ụ ườ ấ ổ ủ ư
- 8 K Flash ROM.
- 368 Bytes RAM.
- 256 Bytes EEPROM.
- 5 ports (A, B, C, D, E) vào ra v i tín hi u đi u khi n đ c l p. ớ ệ ề ể ộ ậ
- 2 b đ nh th i 8 bits (Timer 0 và Timer 2). ộ ị ờ
- M t b đ nh th i 16 bits (Timer 1) có th ho t đ ng trong ch đ ti t ki m năng l ng (SLEEPộ ộ ị ờ ể ạ ộ ế ộ ế ệ ượ
MODE) v i ngu n xung Clock ngoài. ớ ồ
- 2 bô CCP( Capture / Compare/ PWM).
- 1 b bi n đ i AD 10 bits, 8 ngõ vào. ộ ế ổ
- 2 b so sánh t ng t (Compartor). ộ ươ ự
- 1 b đ nh th i giám sát (WatchDog Timer). ộ ị ờ
- M t c ng song song 8 bits v i các tín hi u đi u khi n. ộ ổ ớ ệ ề ể
- M t c ng n i ti p. ộ ổ ố ế
- 15 ngu n ng t. ồ ắ
- N p ch ng trình b ng c ng n i ti p ICSP(In-Circuit Serial Programming) ạ ươ ằ ổ ố ế
- Đ c ch t o b ng công ngh CMOS ượ ế ạ ằ ệ
- 35 t p l nh có đ dài 14 bits. ậ ệ ộ
- T n s ho t đ ng t i đa 20MHz.ầ ố ạ ộ ố
S đ chân c a PIC16F877A :ơ ồ ủ
![Báo cáo thực tập tại Garage Car Plus [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250810/nguyenanhquoc2809@gmail.com/135x160/25661754896300.jpg)



![Đồ án tốt nghiệp: Tính toán, kiểm tra hệ thống điều hòa không khí cho tòa nhà Depot Tham Lương [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250717/vijiraiya/135x160/40421752722146.jpg)



![Thiết kế mạch điện tử: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/ngotien0801@gmail.com/135x160/55401759287195.jpg)





![Đồ án môn học: Tính toán thiết kế nhà máy nhiệt điện [Chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250922/thieuquan520@gmail.com/135x160/35141758512299.jpg)
![Báo cáo thực tập tốt nghiệp Công ty TNHH Cơ điện Samwa Tek: [Mô tả chi tiết hơn về nội dung báo cáo nếu có thể]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250917/trantiendat_ct2/135x160/96461758161119.jpg)

![Báo cáo môn học Thực tập điều khiển tự động [năm]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250915/thanhoangthaibao@gmail.com/135x160/63841757990100.jpg)
