L p : CĐT2 K55ớ
Đ I H C BÁCH KHOA HÀ N IẠ Ọ Ộ
VI N C KHÍỆ Ơ
Đ ÁN THI T K H TH NG C ĐI N TỒ Ế Ế Ệ Ố Ơ Ệ Ử
Đ tàiề
THI T K H TH NG C ĐI N T Ế Ế Ệ Ố Ơ Ệ Ử
CHO ROBOT HAI B C T DO RRẬ Ự
Giáo viên h ng d nướ ẫ Ths M C TH THOAẠ Ị
Sinh viên th c ự
hi nệĐinh Đ c Anhứ
Hà N i 12/2013ộ
N I DUNG TRÌNH BÀYỘ
1. Gi i thi u chung v robot công nghi pớ ệ ề ệ
2. Thi t k mô hình 3D c a robot RRế ế ủ
3. Tính toán đ ng h c thu n, ng c robot ộ ọ ậ ượ
RR
4. Bài toán tĩnh h c robot RR ọ
5. Bài toán đ ng l c h c Robt RRộ ự ọ
6. Thi t k qu đ o chuy n đ ngế ế ỹ ạ ể ộ
ề ể ỏ
1. GI I THI U CHUNG V ROBOTỚ Ệ Ề
üTrên th gi i: ế ớ
Ø Năm 1921, thu t ng “Robot” xu t phát t ậ ữ ấ ừ
ti ng CH Séc(Czech), nó xu t hi n l n đ u tiên ế ấ ệ ầ ầ
trong m t v k ch Rossum’s Universal Robot ộ ở ị
c a Karel Capek cùng năm đó.ủ
Cho đ n nay, th gi i đã có nh ng b c phát ế ế ớ ữ ướ
tri n vô cùng m nh m trong lĩnh v c Robot.đ c ể ạ ẽ ự ặ
bi t là các n c có n n công nghi p phát tri n ệ ướ ề ệ ể
nh : Anh, Th y Đi n,Nh t,M , CHLB ư ụ ể ậ ỹ
Đ c,Pháp, Ý…….ứ
ü Trong n c:ướ
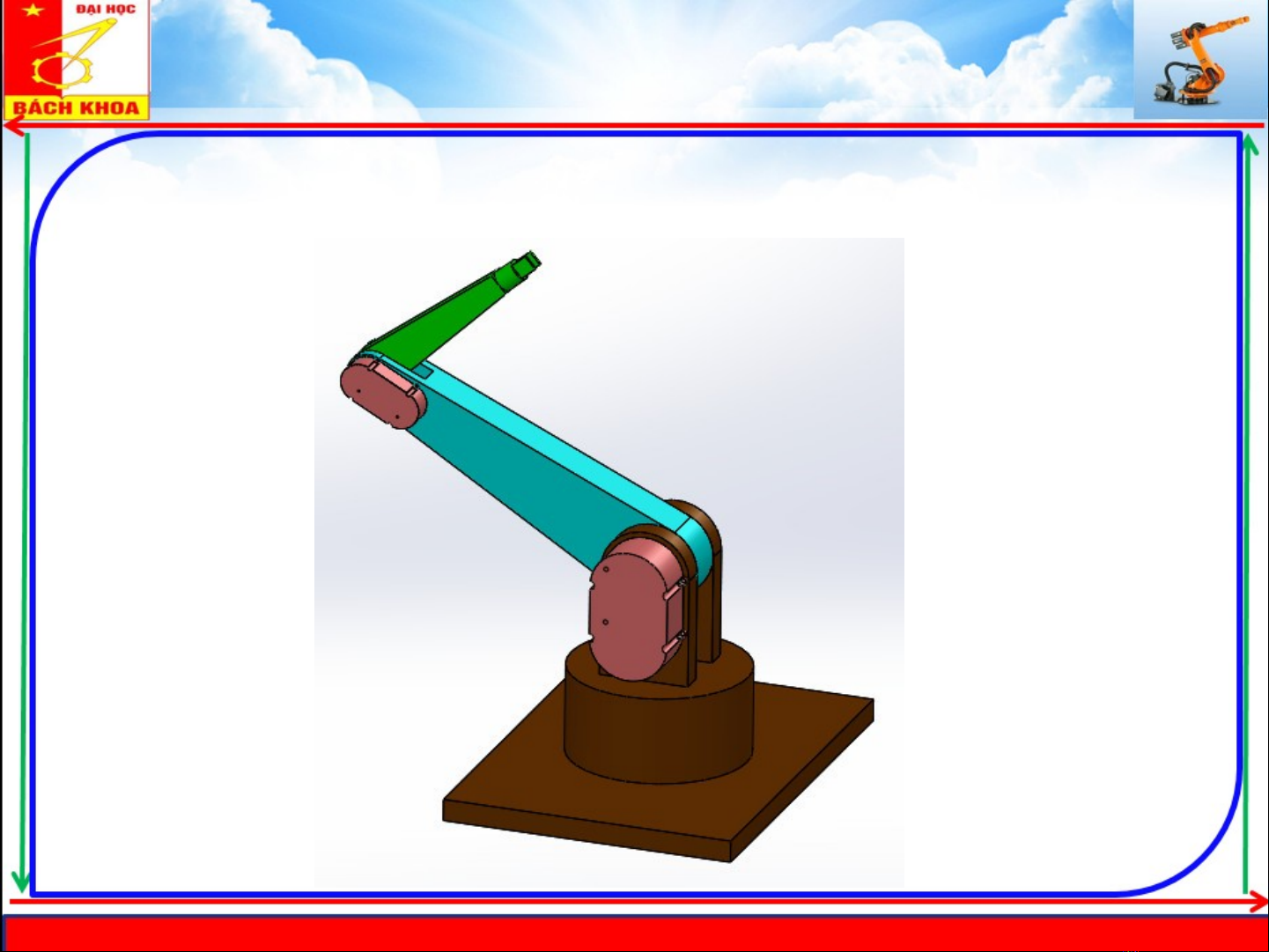
2. THI T K MÔ HÌNH 3D C A ROBOT RRẾ Ế Ủ
Ta thi t k mô hình 3D c a robot có d ng nh ế ế ủ ạ ư
sau
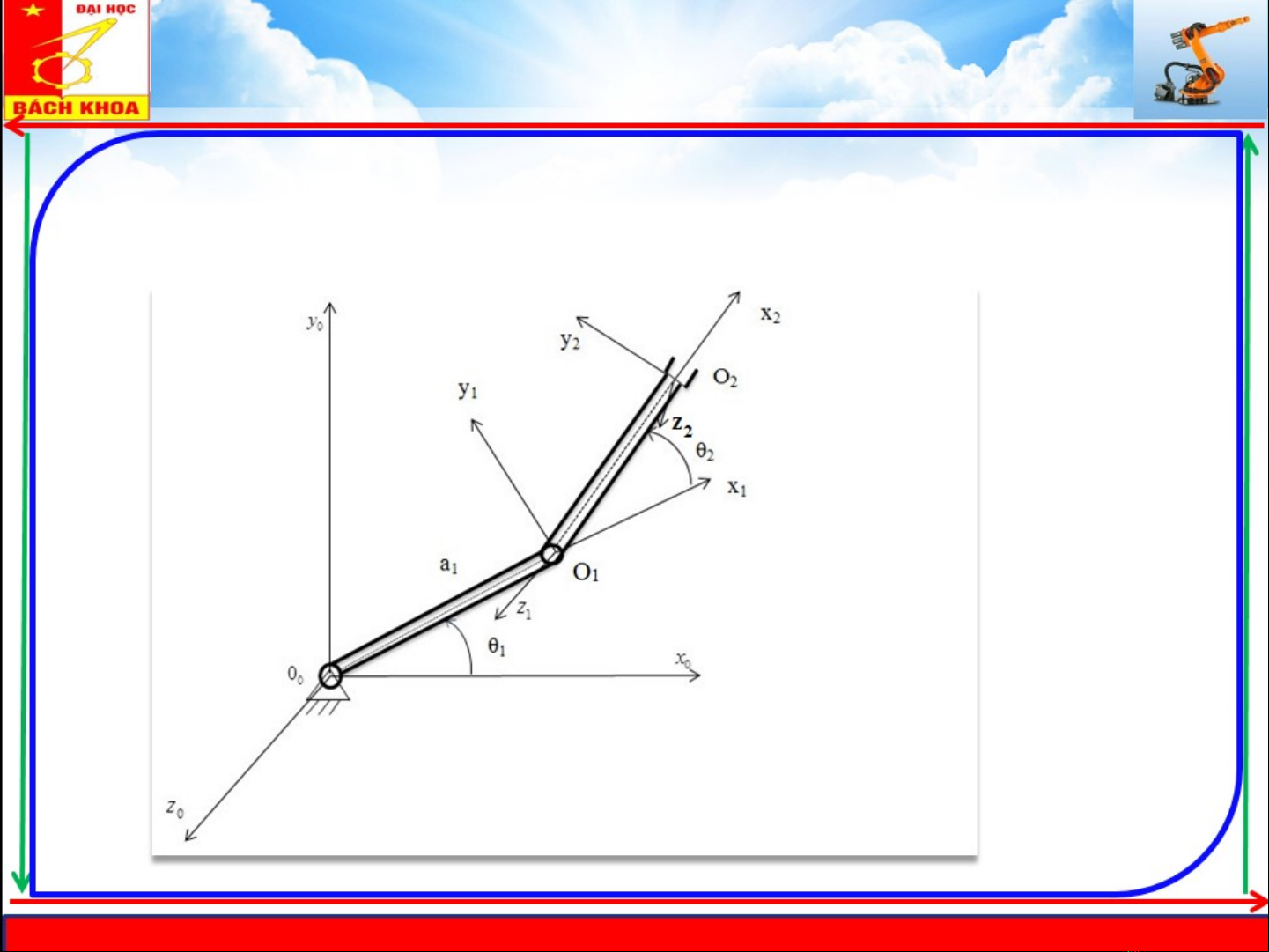
3. TÍNH TOÁN Đ NG H C THU N VÀ NG CỘ Ọ Ậ ƯỢ
Ta có s đ đ t h t a đ cho robot theo quy t c ơ ồ ặ ệ ọ ộ ắ
Denavit-Hatenberg nh sau ư: