Tính toán thiết kế robot GVHD: Th.S Đinh Khắc Toản
1
Mục lục Trang
Lời nói đầu ............................................................................................................ 4
CHƯƠNG I PHÂN TÍCH VÀ CHỌN KÊT CẤU .............................................. 5
1 Số bậc tự do cần thiết ..................................................................................... 5
2 Các phương án thiết kế và cấu trúc các khâu khớp ........................................ 6
3 Phân tích, chọn, thiết kế cấu trúc được chọn ................................................. 7
CHƯƠNG 2 GIẢI BÀI TOÁN ĐỘNG HỌC ...................................................... 9
2.1 Khảo sát bài toán động học thuận Robot .................................................... 9
2.2 Thiết lập các phương trình động học robot .............................................. 10
2.3 Bài toán động học thuận ............................................................................ 12
2.4 Bài toán động học ngược........................................................................... 18
CHƯƠNG 3 TĨNH HỌC ROBOT ..................................................................... 21
3.1 Phân tích lực .............................................................................................. 21
3.1.1 Tính lực và momen ở khâu 3 ............................................................. 21
3.1.2 Tính lực và momen khâu 2 ................................................................. 22
3.1.3 Tính lực và momen khâu 1 ................................................................. 23
3.2 Tính toán lực và momen lớn nhất ở trạng thái tĩnh ................................... 24
CHƯƠNG 4 ĐỘNG LỰC HỌC ROBOT .......................................................... 25
4.1 Xây dựng cấu trúc động lực học ............................................................... 25
4.1.1 Xác định thế năng của robot............................................................... 26
4.1.2 Xác định các Ma trân Jacobi tịnh tiến và Jacobi quay ....................... 26
4.2 Xác định động năng của Robot ................................................................. 27
4.3 Xác định các ma trận Clioris ..................................................................... 28
4.4 Xác định lực suy rộng .............................................................................. 30
4.5 Phương trình vi phân chuyển động của robot ........................................... 30
CHƯƠNG 5 TÍNH CHỌN THIẾT BỊ DẪN ĐỘNG ROBOT ........................... 32
Phần A BỘ TRUYỀN VITME ĐAI ỐC BI .................................................... 32
5.1 Các thông số đầu vào ................................................................................ 32
Bước vitme l .................................................................................................... 33
Tìm lực cắt chính của Robot khi gia công ...................................................... 33

Tính toán thiết kế robot GVHD: Th.S Đinh Khắc Toản
2
Điều kiện làm việc và các thông số sẽ được tính chọn ................................... 33
5.2 Chọn trục vít .............................................................................................. 34
5.2.1 Tính toán lực dọc trục ........................................................................ 34
5.5.2 Tính toán tải trọng động Ca ................................................................ 35
5.2.3 Chiều dài trục vít-me .......................................................................... 35
5.2.4. Chọn đường kính trục vít .................................................................. 36
5.2.5 Chọn series ......................................................................................... 37
5.3 Tính chọn ổ bi đỡ ...................................................................................... 37
5.4 Tính toán kiểm nghiệm ............................................................................. 38
5.4.1 kiểm nghiệm trục vít .......................................................................... 38
5.4.2 Kiểm nghiệm ổ lăn ............................................................................. 40
5.5 Chọn động cơ ............................................................................................ 42
5.5.1 Momen phát động ............................................................................. 42
5.5.2 Chọn động cơ .................................................................................... 44
PHẦN B BỘ TRUYỀN BÁNH RĂNG CHO KHÂU 3................................. 45
5.1 Thông số đầu vào ..................................................................................... 45
5.2 Tính toán động học ................................................................................... 45
5.3 Thiết kế bộ truyền ..................................................................................... 47
5.3.1 Chọn vật liệu ..................................................................................... 47
5.3.2 Xác định ứng xuất cho phép ............................................................... 48
5.4 Tính toán thiết kế bộ truyền bánh răng .................................................... 51
5.4.1 Xác định khoảng cách trục ................................................................ 51
5.4.2 Xác định thông số ăn khớp ................................................................ 52
5.5 Kiểm nghiệm bộ truyền bánh răng ........................................................... 53
5.5.1 Kiểm nghiệm độ bền tiếp xúc ............................................................ 53
5.5.2 Kiểm nghiệm độ bền uốn ................................................................... 55
5.5.3 Kiểm nghiệm về quá tải ..................................................................... 56
5.5.4 Tổng kết các thông số cơ bản của bộ truyền ...................................... 57
5.6 Tính toán thiết kế khớp nối ...................................................................... 58
5.6.1 Tính chọn khớp nối ............................................................................ 58
5.6.2 Kiểm nghiệm khớp nối ...................................................................... 60
5.6.3 Tổng kết thông số cơ bản của nối trục vòng đàn hồi ......................... 60

Tính toán thiết kế robot GVHD: Th.S Đinh Khắc Toản
3
5.7 Tính toán thiết kế trục .............................................................................. 61
5.7.1 Chọn vật liệu ...................................................................................... 61
5.7.2 Xác định lực và sơ đồ đặt lực ............................................................. 61
5.7.3 Hệ phương trình cân bằng lực và momen .......................................... 62
5.7.4 Xác định đường kính trục .................................................................. 64
5.7.5 Tính mối ghép then ............................................................................ 66
5.7.6 Kiểm nghiệm độ bền trục ................................................................... 67
5.8 Chọn ổ lăn ................................................................................................ 72
5.8.1 Ổ lăn trục I .......................................................................................... 72
5.8.2 Ổ lăn trục II ....................................................................................... 75

Tính toán thiết kế robot GVHD: Th.S Đinh Khắc Toản
4
Lời nói đầu
Nền khoa học kỹ thuật ngày nay đang phát triển rất mạnh mẽ, dẫn tới những
thay đổi lớn lao trong sản xuất. Đó là sự thay đổi lực lượng sản xuất trong mọi
nghành nghề bằng việc thay sức lao động của người bằng máy móc nhằm đảm
bảo tăng năng suất lao động, sản lượng cũng như chất lượng sản phẩm. Do đó
việc sử dụng các tay máy hay còn gọi là Robot công nghiệp vào trong sản xuất
đang rất được ưa chuộng bởi vì chúng đáp ứng được các yêu cầu trên. Như chúng
ta đã biết Robot có rất nhiều ưu điểm đặc biệt là chất lượng và độ chính xác, ngoài
ra còn phải kể đến hiệu quả kinh tế cao, có thể làm việc trong môi trường độc hại
mà con người không thể làm được, các công việc yêu cầu cẩn thận không được
nhầm lẫn,thao tác nhẹ nhàng tinh tế đòi hỏi trình độ của thợ bậc cao, và quan trọng
là Robot không bị căng thẳng như con người nên có thể làm việc suốt cả ngày.
Ngày nay việc viết chữ và khắc chữ trên các vật liệu của con người là một trong
những nhu cầu rất cần thiết , việc viết đẹp và đều trong thời gian dài quả là điều
khó khăn đối với con người, chính vì thế mà việc nghiên cứu chế tạo ra một thiết
bị như cánh tay robot để làm được việc đó có ý nghĩa rất lớn.
Việc tìm hiểu nghiên cứu Robot trong khuôn khổ môn học tính toán thiết kế
robot sẽ là cơ sở để chúng em tính toán, thiết kế cũng như điều khiển các loại
Robot trong công nghiệp phục vụ sản xuất. Cụ thể, ở đây chúng em chọn đề tài
tính toán, thiết kế Robot viết chữ phục vụ việc khắc chữ trên các sản phẩm công
nghiệp.
Tính toán thiết kế robot GVHD: Th.S Đinh Khắc Toản
5
CHƯƠNG I
PHÂN TÍCH VÀ CHỌN KÊT CẤU
1 Số bậc tự do cần thiết
Đề bài yêu cầu tính toán thiết kế Robot khắc chữ trên mặt phẳng ngang với
hướng viết tùy ý trong không gian làm việc 50×70cm, từ đó ta có thể hình
dung cần 2 bậc tự do để xác định tọa độ một điểm trên một mặt phẳng, một
bậc tự do để xác định chiều cao trong không gian, do đó số bậc tự do tối thiểu
mà Robot cần có là 3 bậc tự do. Dưới đây là một số cơ cấu có thể dung để xác
định các vị trí trong không gian.
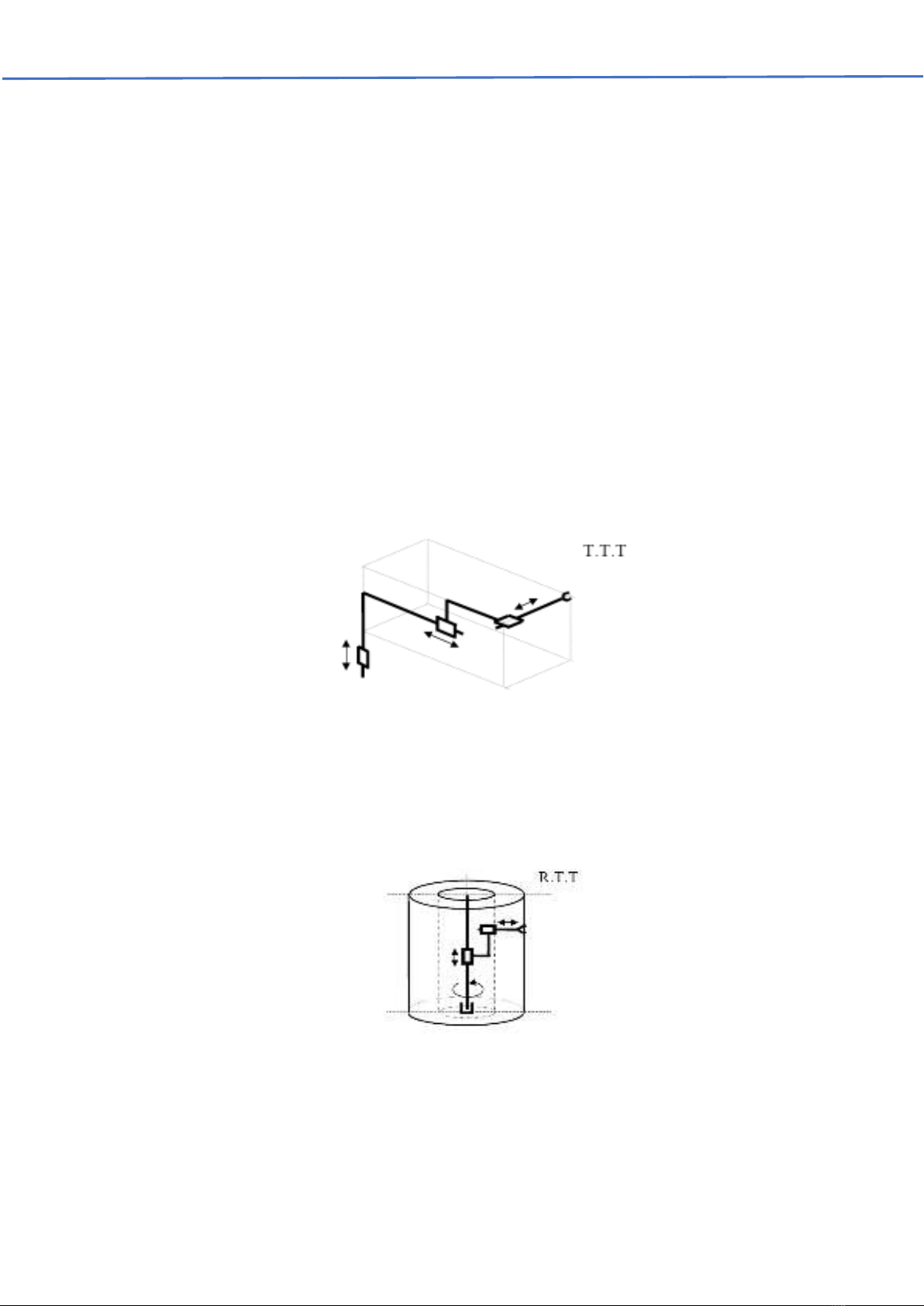
Cơ cấu robot tọa độ Đecac: Là tay máy có 3 chuyển động cơ bản tịnh tiến theo
phương của các trục hệ tọa độ gốc (cấu hình TTT). Không gian làm việc của bàn
tay có dạng khối chữ nhật.
Hình 1.1 Cơ cấu tọa độ Đecac
Cơ cấu robot tọa độ trụ: Không gian làm việc của robot có dạng hình trụ rỗng.
Thường khớp thứ nhất là chuyển động quay.
Hình 1.2 Cơ cấu tọa độ trụ






![Robot tự vận hành: Đề tài nghiên cứu khoa học [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240119/boghoado07/135x160/896608541.jpg)






![Thiết kế mạch điện tử: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/ngotien0801@gmail.com/135x160/55401759287195.jpg)