B. Khố
i
Nối ghé
p
trăm. Hà
n
động cơ
c
1.
H
Trong
n
ngày c
à
nhiều t
h
-Màn h
ì
-Khả n
ă
hiển thị
-Sử dụ
n
công vi
ệ
duy trì
v
-Dễ dà
n
2.
M
LCD gi
bảng n
h
i
hiển thị
p
LCD với
n
g đầu là
g
c
hạy và đ
ư
H
oạt động
c
n
hững nă
m
à
ng được s
ử
h
anh). Đó
l
ì
nh LCD c
ă
ng hiển t
h
được số
v
n
g thêm m
ộ
ệ
c này. C
ò
v
ieec hiển
n
g lập trìn
h
M
ô tả chân
ới thiệu ở
h
ư sau:
C
h
2
3
4
5
6
7
vi xử lý 8
0
g
iá t
r
ị nhậ
p
ư
ợc hiển th
c
ủa LCD:
m
gần đây,
m
ử
dụng rộ
n
l
à do các
n
ó giá thàn
h
h
ị số, ký tự
v
à một số
k
ộ
t bộ điều
ò
n đối với
đ
thị dữ liệ
u
h
các ký t
ự
của LCD:
đây có 14
h
ân Ký h
i
1 VS
S
2
VC
C
3
VE
E
4
R
S
5
R/
W
6
E
7
DB
0
0
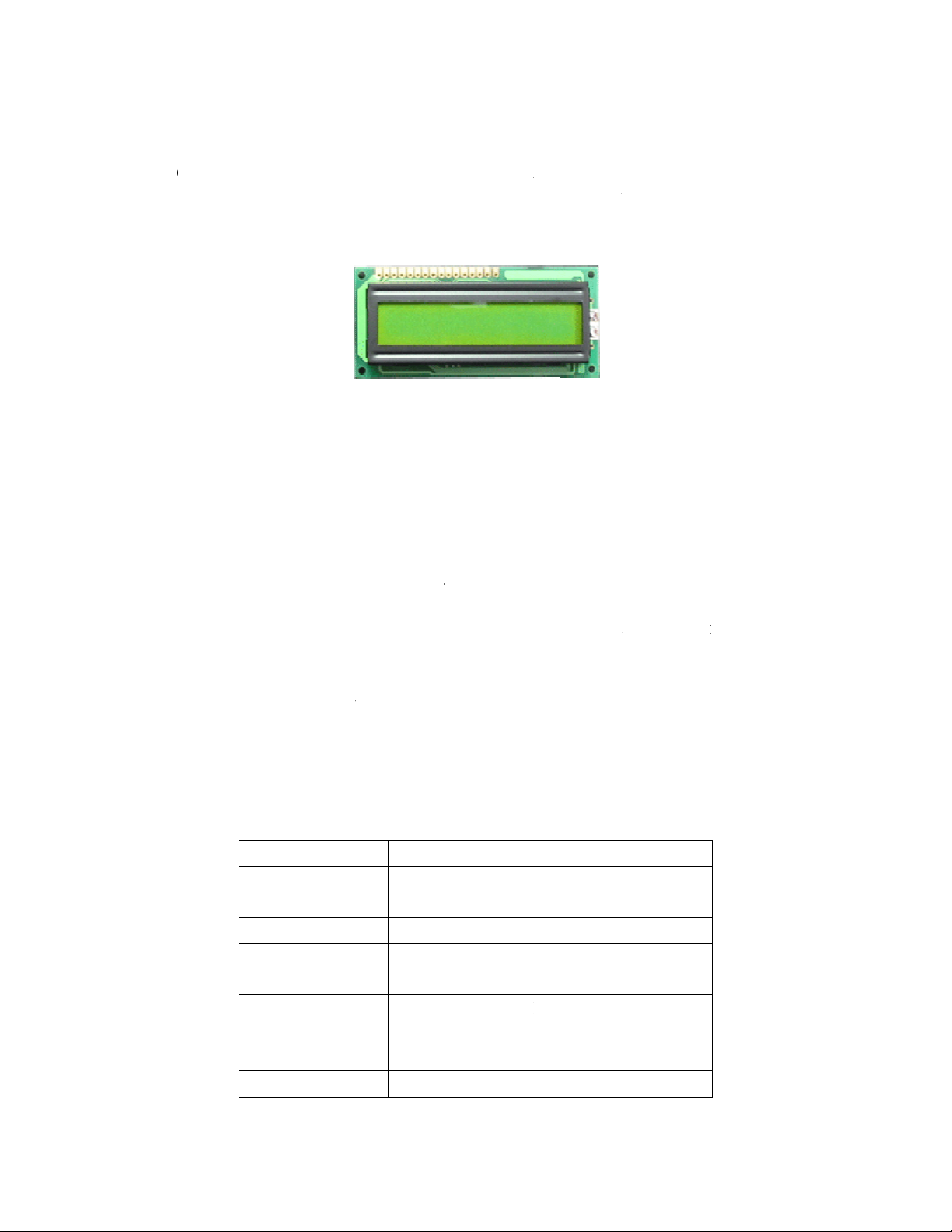
51: LC
D
p
vào để đ
ộ
ị t
r
ên LC
D
m
àn hình
t
n
g
r
ãi và đ
a
n
guyên nh
â
h
hạ
và đồ ho
ạ
k
ý tự).
khiển làm
đ
èn LED l
u
u
.
ự
và đồ ho
ạ
chân. Ch
ứ
i
ệu I/O
S
-
Đ
C
-
D
E
-
N
S
I
R
R
W
I
R
R
I/O
C
0
I/O
B
D
gồm có
h
ộ
ng cơ ch
ạ
D
.
t
inh thể lỏ
n
a
ng dần th
a
â
n sau:
ạ
tốt hơn n
h
tươi LCD
u
ôn cần C
P
ạ
.
ứ
c năng củ
a
Đ
ất
D
ương ng
u
N
guồn điề
R
S = 0 ch
ọ
R
S = 1 ch
ọ
R
/W = 1
đ
R
/W = 0 g
C
ho phép
B
us dữ liệ
u
h
ai hàng h
à
ạ
y, hàng th
ứ
n
g LCD (
L
a
y thế các
h
iều so vớ
i
và như v
ậ
P
U (hoặc
b
a
các chân
Mô tả
u
ồn +5V
u khiển tư
ọ
n thanh g
h
ọ
n thanh g
h
đ
ọc dữ liệu
hi
u
8 bits
à
ng đơn vị
,
ứ
hai là gi
á
L
iquid Cry
s
đèn LED
(
i
đèn LED
ậ
y giải phó
n
b
ằng cách
được trìn
h
ơng phản
h
i lệnh
h
i dữ liệu
,
hàng chụ
c
á
t
r
ị mà th
ự
s
tal Displ
a
(
7 thanh v
à
(đèn LE
D
n
g CPU k
h
nào đó) đ
ể
h
bày tron
g
c
, hàng
ự
c chất
a
y)
à
D
chỉ
h
ỏi
ể
g
8 DB1 I/O Bus dữ liệu 8 bits
9 DB2 I/O Bus dữ liệu 8 bits
10 DB3 I/O Bus dữ liệu 8 bits
11 DB4 I/O Bus dữ liệu 8 bits
12 DB5 I/O Bus dữ liệu 8 bits
13 DB6 I/O Bus dữ liệu 8 bits
14 DB7 I/O Bus dữ liệu 8 bits
3. RS (Register Select) - chọn thanh ghi:
Có hai thanh ghi rất quan trọng bên trong LCD. Chân RS được dùng để chọn các
thanh ghi này. Nếu RS = 0 thì thanh ghi mã lệnh được chọn, cho phép người dùng
gửi một lệnh chẳng hạn như xoá màn hình, đưa con trỏ về đầu dòng v.v…Nếu RS
= 1 thì thanh ghi dữ liệu được chọn và cho phép người dùng gửi dữ liệu cần hiển
thị lên LCD.
4. R/W (Read/Write) – chân đọc/ghi:
Chân vào đọc/ghi cho phép người dùng đọc/ghi thông tin từ/lên LCD. R/W = 0 thì
đọc, R/W = 1 thì ghi.
5. E (Enable) – chân cho phép:
Chân E được LCD sử dụng để chốt thông tin hiện có trên chân dữ liệu. Khi dữ liệu
được cấp đến chân dữ liệu thì một xung mức Cao-xuống-thấp được áp đến chân E
để LCD chốt dữ liệu trên chân dữ liệu. Xung này phải rộng tối thiểu 450ns.
6.D0 – D7:
Đây la 8 chân dữ liệu 8 bits, được dùng để gửi thông tin lên LCD hoặc đọc nội
dung của các thanh ghi trong LCD.
Để hiển thị chữ cái và con số, mã ASCII của các chữ cái từ A đến Z, a đến z, và
các con số tự 0 – 9 được gửi đến các chân này khi RS = 1.
Cũng có các mã lệnh được gửi đến LCD để xoá màn hình hoặc đưa con trỏ về đầu
dòng hoặc nhấp nháy con trỏ.
Cũng có thể sử dụng RS = 0 để kiểm tra bit cờ bận xem LCD đã sẵn sàng nhận
thông tin chưa. Khi R/W = 1 và RS = 0 thì cờ bận D7 thực hiện các chức năng như
sau: Nếu D7 = 1 (cờ bận bằng 1) có nghĩa LCD đang bận các công việc bên trong
và sẽ không nhận bất kỳ thông tin mới nào, còn nếu D7 = 0 thì LCD sẵn sàng nhận
thông tin mới. Trong mọi trường hợp cần kiểm tra cờ bận trước khi ghi bất kỳ dữ
liệu nào lên LCD.
-LCD ghép nối với các cổng p1.0…..p1.7 cổng p1 là cổng dữ liệu dùng để
chuyễndữ liệuvà chênh lệch giá trị , 3chân EN , RW,RS được nối với các chân
của vi xử lý có nhiệm vụ như đã nói ở trên , chân thứ 15,16 lắp cho đèn LCD (ở
đây ta không dùng nối với các cổng p1.0…..p1.7 cổng p1 là cổng dữ liệu dùng để
chuyễndữ liệu và chênh lệch giá trị , 3chân EN , RW,RS được nối với các chân
của vi xử lý có nhiệm vụ như đã nói ở trên , chân thứ 15,16 lắp cho đèn LCD (ở
đây ta không dùng
C .Phần đo động cơ (k
hèi sensor
)
Về phần này thì gồm có những bộ phận sau:
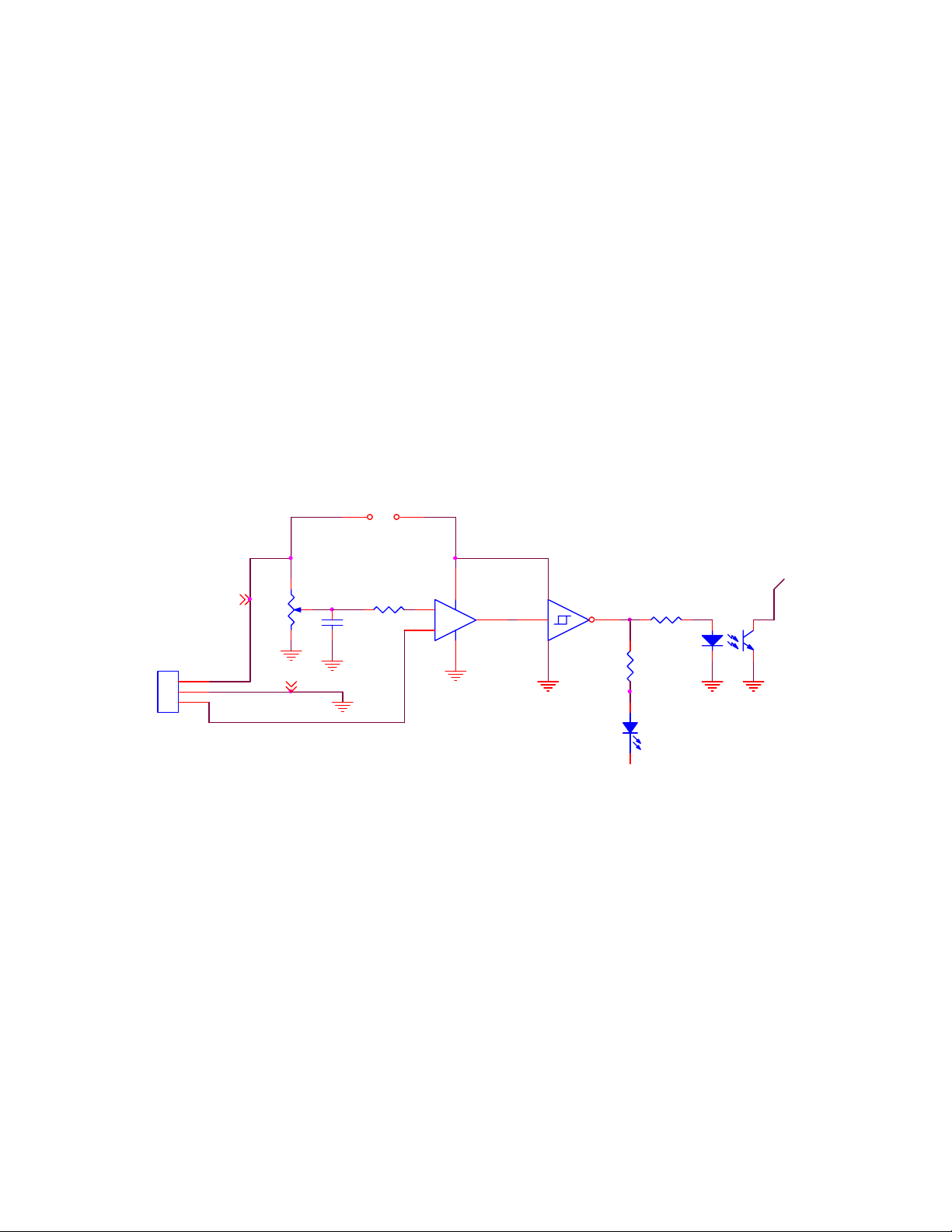
+ Bộ thu phát hồng ngoại làm nhiệm vụ thu nhận tốc độ động cơ bằng Diode thu phát
quang đÓ đếm số vòng quay của động cơ qua một đĩa chắn quang gắn vào trục của
motơ
+ Bộ so sánh ngưỡng LM324 làm nhiệm vụ chuyển tín hiệu từ bộ thu phát hồng ngoại
thành tín hiệu TTL tương ứng đưa vào chân P1.0 của vi điều khiển.LM 324 có nhiệm vụ
khuyếch đại thuật toán
74HC14 trigosmith hoạt động theo sườn tránh các hoạt động dao động trên đường truyền
r3s
D3s
LED
Cs1
C
p33.4
5V R4s
U3
TLP621
12
43
Rs1
10k
J2s
CON3
1
2
3
JP1s
R2s
-
+
U1AsA
LM324
3
2
1
411
U2AsA
74HC14
1 2
147
Grd
Nguyên lý hoạt động của mạch: Việc đo tốc độ của động cơ dựa vào quá trình
đếm xung của vi xử lí thông qua các xung của bộ sensor thu phát ( ứng với mỗi
vòng quay của động cơ sensor sẽ phát 1 xung đưa về bộ đếm của vi xử lí) .
Thông qua chương trình được lập trình sẵn trong vi xử lí , mạch đếm sẽ tính toán
số liệu đo được và cho hiển thị kết quả. Với khả năng lập trình được vi xử lí cho
phép tự động chọn thang đo ( có thể thay đổi khoảng thời gian trong phép đo từ đó
thay đổi thang đo theo giây hay phút ...) . Ngoài ra , vi xử lí còn cho phép phát
triển thêm các tính năng của mạch như điều khiển tốc độ của động cơ khi cần thiết
, lưu giữ các kết quả của các phép đo trước đó mở rộng khả năng ứng dụng trong
nhiều lĩnh vực của mạch ( đo tần số , đo chu kì...) .
Nhờ sử dụng xung động bộ của thạch anh có độ chính xác và ổn định cao nên vi xử
lí cho phép loại bỏ sai số của hệ thống do sự “ chậm ” của thời điểm “mở” và
“đóng” các xung của tín hiệu đi vào mạch tính toán.
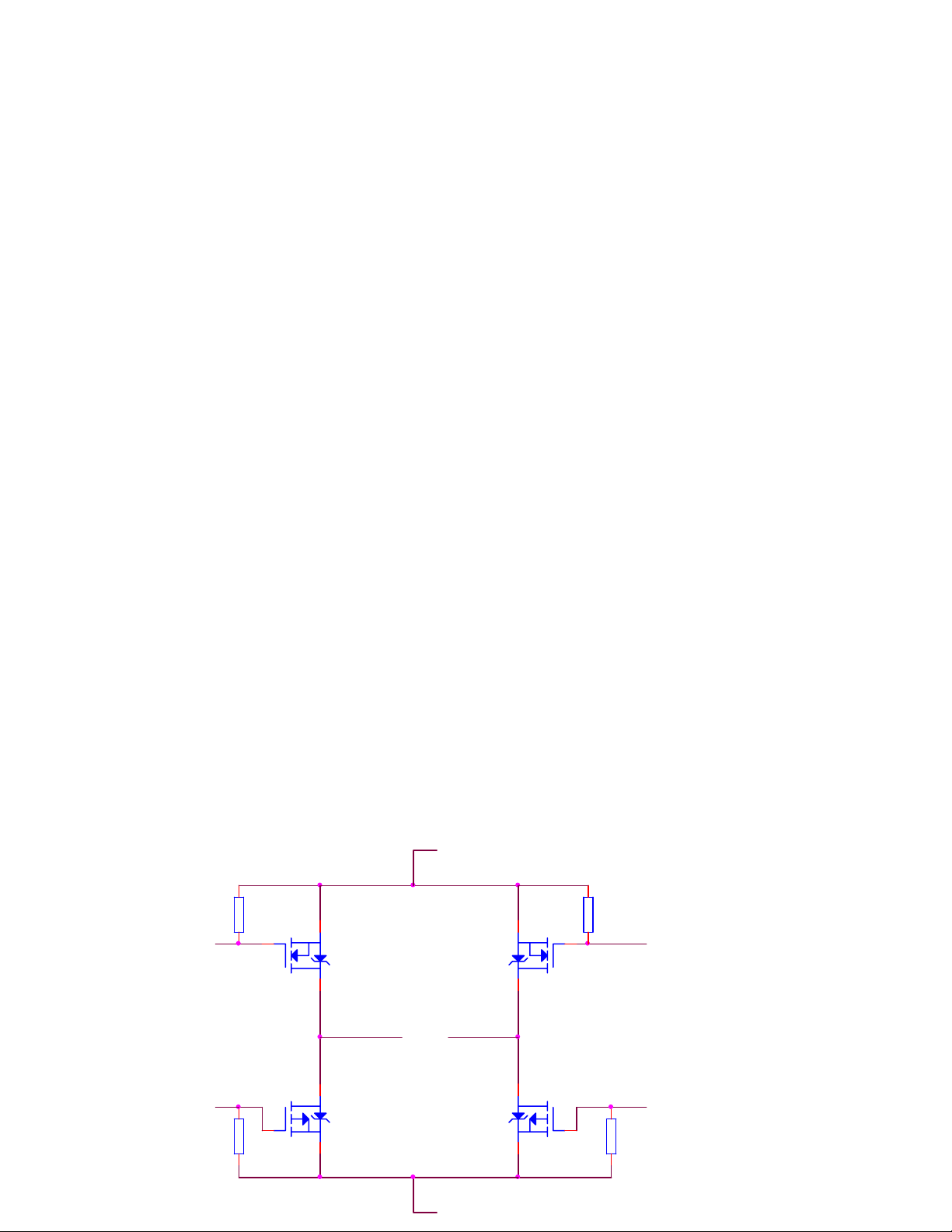
D.Phần động lực
mạch cầu H có nhiệm vụ điều khiển tốc độ động cơ, thay đổi điện áp đầu vào dẫn đến thay
đổi thay đổi tốc độ của động cơ
Nguyên lý hoạt
động của mạch cầu H:
M+
Rh2 IRF9540
2
1
3
R_IRF1
10K
R_IRF3
10K
R_IRF4
10K
M-
Rh4
0V
Rh3
tD2
IRF9540
2
1
3
Rh1
R_IRF2
10K
24V
tD3
IRF540
2
1
3
tD4
IRF540
2
1
3
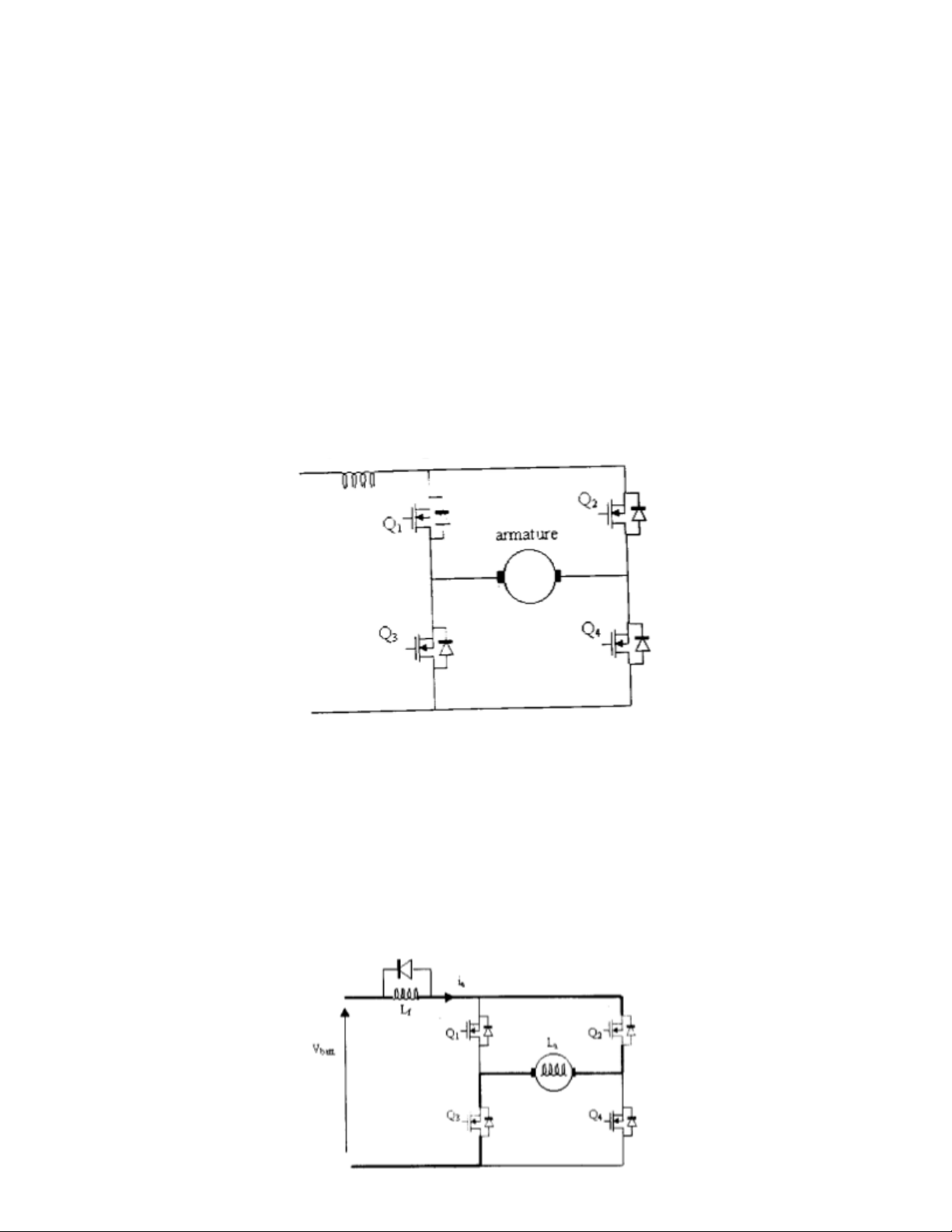
Mạch cầu H được mô tả trong hình dưới đây. Động cơ được nối với các cực âm và
dương của nguồn. Chú ý là chỉ một MOSFET ở mỗi bên của động cơ được bật lên
tại một thời điểm nếu không nó sẽ ngắn mạch và cháy.
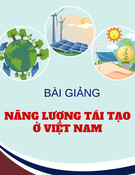
Để động cơ chạy theo chiều thuận, Q4 được bật, Q1 có tín hiệu điều chế độ rộng
xung PWM. Dòng điện được chỉ ra trong hình dưới đây.










![Trắc nghiệm Mạch điện: Tổng hợp câu hỏi và bài tập [năm hiện tại]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251118/trungkiendt9/135x160/61371763448593.jpg)