
GIÁO TRÌNH CƠ HỌC LÝ THUYẾT II PHẦN ĐỘNG LỰC HỌC
Trong đó : 0== ∑i
k
iFR
GG
và 0)( == ∑k
i
O
i
OFmM
G
G
G
Theo nguyên lý ta có :
0
0
=+
=+
qt
O
e
O
qte
MM
RR GG
G
G
Chiếu lên các trục tọa độ ta thu nhận :
0
0
0
0
0
0
=+
=+
=+
=+
=+
=+
qt
z
e
z
qt
y
e
y
qt
x
e
x
qt
z
e
z
qt
y
e
y
qt
x
e
x
MM
MM
MM
RR
RR
RR
(4.11)
Phươmg pháp tĩnh học thường dùng để tính các phản lực động.
3.2 Phản lực trục quay và khái niệm cân bằng trục quay :
a) Phản lực động của trục quay:
Cho vật (S) dưới tác dụng của các ngoại lực
{
}
)( p
k
F
G
quay quanh trục Oz với vận tốc
góc
ω
G và gia tốc góc c.
Ta cần xác định phản lực tại các ổ trục tác dụng lên trục.
Các phản lực xuất hiện khi vật quay với
ω
G
≠ 0, ta gọi các phản lực này là phản lực
động. Còn nếu
ω
G= 0, theo trước đây ta gọi chúng là phản lực tĩnh.
Giải phóng liên kết tại A, B thay bằng :
),,(~ AAAA ZYXR
G
G
G
G
và ),(~ BBB YXR
G
G
G
Theo nguyên lý Đalambe ta có :
(
{
}
)( p
k
F
G
,A
R
G
,B
R
G
,
{
}
qt
k
F
G
) ~ 0
Trong đó :
{
}
qt
k
F
G
~ ( qtqt MR
G
G
,)
Thu gọn về tâm O trên trục quay C
qt WMR
G
G
−=
Trong đó C
W
G
được tính theo công thức (4.6). Còn qt
M
G
chiếu lên các trục tọa độ
được tính theo công thức (4.7)
Chương IV Nguyên lý Đalămbe Trang 60
GIÁO TRÌNH CƠ HỌC LÝ THUYẾT II PHẦN ĐỘNG LỰC HỌC
Ta thiết lập phương trình cân bằng :
0
0
0
0
0
0
2
2
2
2
=−
=++−+
=++−+
=+
=−+++
=++++
ε
εω
εω
εω
εω
z
e
z
yzxzBA
e
y
xzyzBA
e
x
e
z
xCyCBA
e
y
yCxCBA
e
x
JM
JJbXaXM
JJbYaXM
ZR
MMYYR
MMXXR
(4.12)
Phương trình cuối cùng của (4.12) chính là phương trình vi phân chuyển động của
vật quay. Còn các phương trình còn lại xác định các phản lực BA RR
G
G
,.
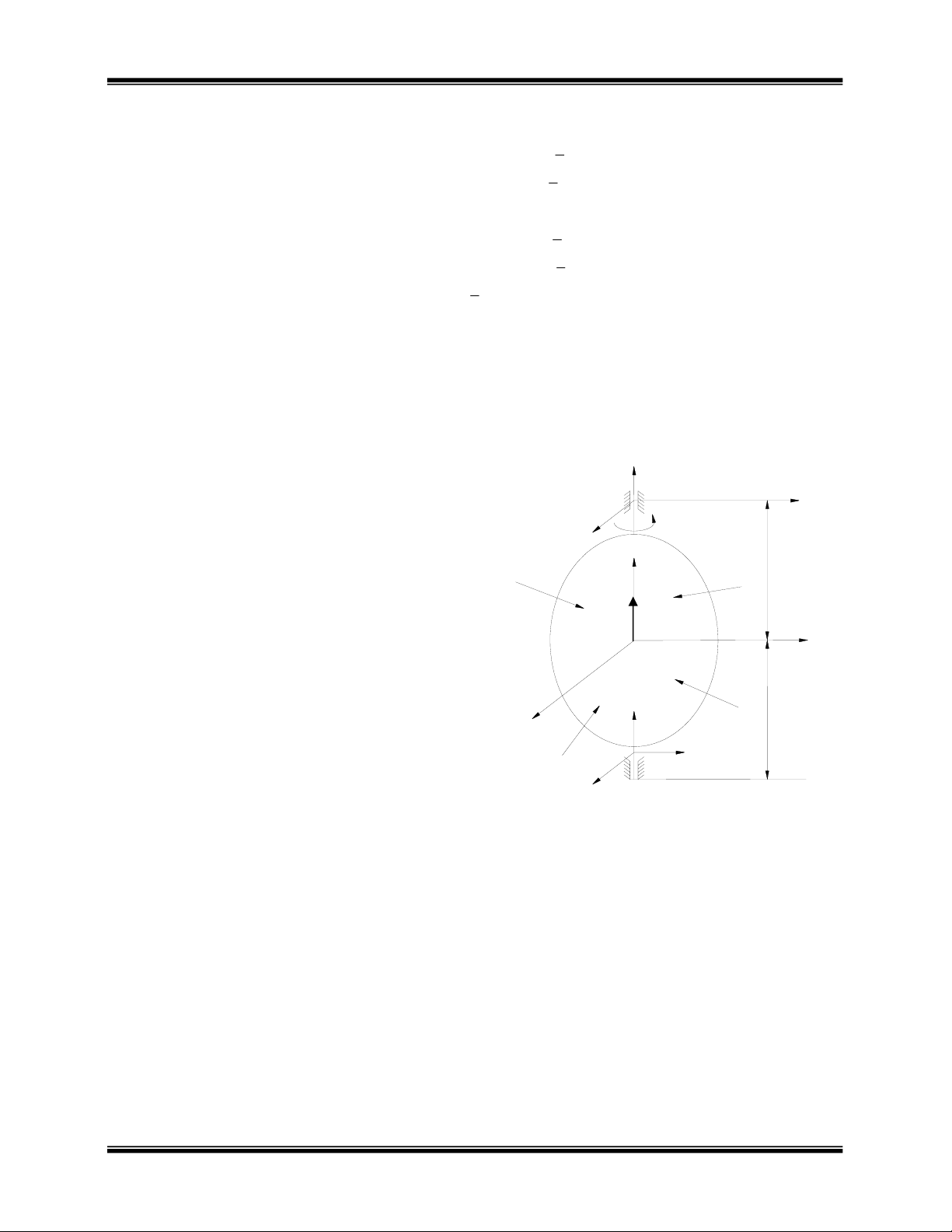
b) Cân bằng của trục quay :
Từ những phương trình (4.12) ta thấy
các giá trị ω và ε của phản lực động không
những phụ thuộc vào giá trị mà còn phụ
thuộc vào các đại lượng XC, YC, Jxz , Jyz đặc
trưng cho sự phân bố khối lượng của vật
đối với trục quay Oz.
Ta thấy chuyển động quay không ảnh
hưởng đến giá trị của phản lực ở các ổ trục
quay nếu :
XC = 0 và YC = 0 (4.13)
Jxz = Jyz = 0 (4.14)
1
F
G
3
F
G
2
F
G
y
A
x
A
a
z
A
x
B
x
ε
G
4
F
G
b
z
B
y
B
B
ω
G
z
y
O
Hình 6
Điều kiện (4.13) và (4.14) chính là điều kiện cân bằng động của các khối lượng các
vật quay quanh trục Oz. Điều kiện (4.13) chứng tỏ khối tâm C nằm trên trục quay. Còn
(4.14), trục quay Oz là trục quán tính chính trung tâm của vật.
Vậy : Phản lực động tác dụng lên trục của vật quay sẽ bằng phản lực tĩnh nếu trục
quay là một trong những trục quán tính chính trung tâm của vật.
Từ đây nó cho ta ý nghĩa của các đại lượng Jxz và Jyz là đặc trưng cho mức độ mất
cân bằng động của các khối lượng của vật khi nó quay quanh trục Oz. Phương pháp
Chương IV Nguyên lý Đalămbe Trang 61
GIÁO TRÌNH CƠ HỌC LÝ THUYẾT II PHẦN ĐỘNG LỰC HỌC
cân bằng các khối lượng như vậy được sử dụng rộng rãi trong kỹ thuật để cân bằng các
trục khuỷu, các tay quay, các bộ truyền ..v..v.
3.3 Các ví dụ :
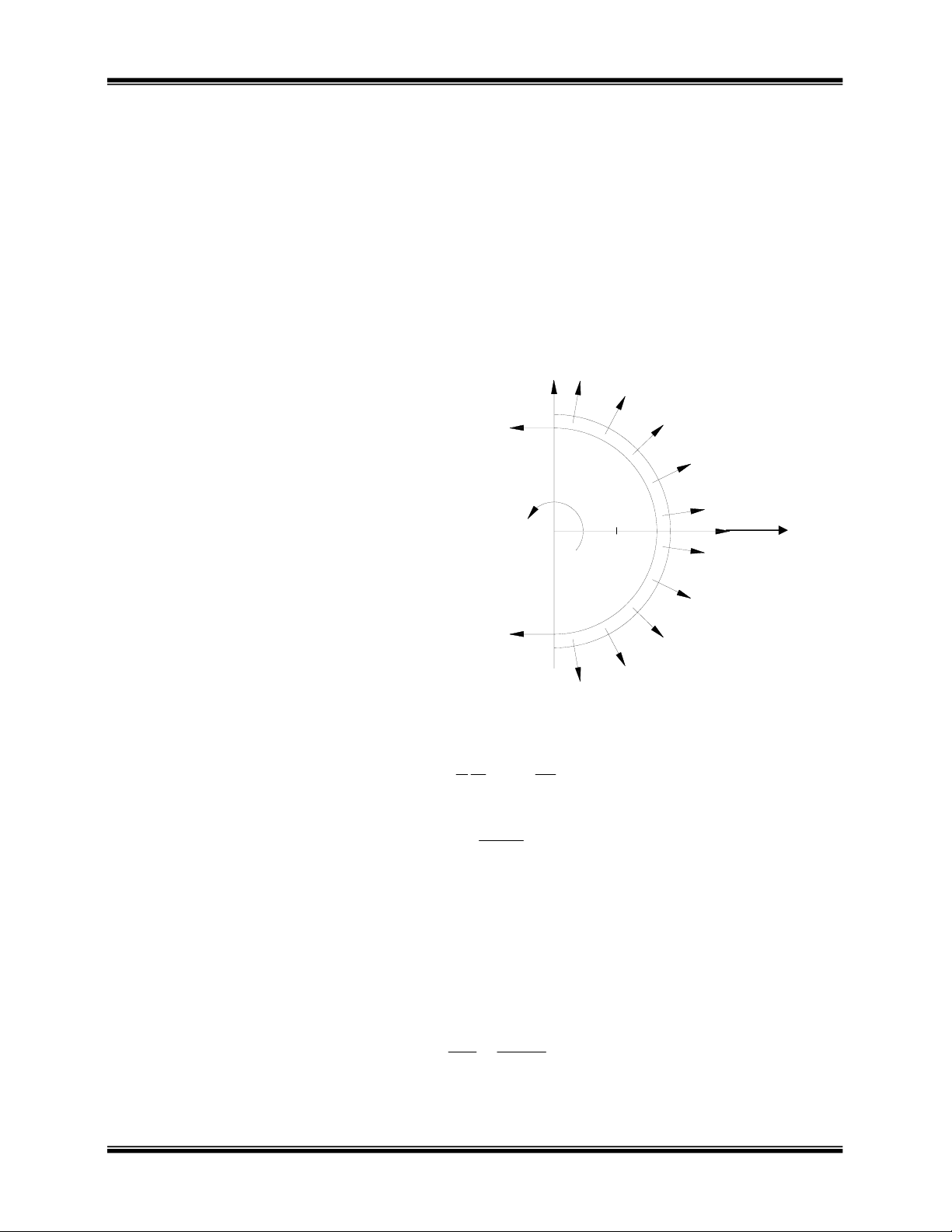
a) Ví dụ 1: Một vôlăng trọng lượng P quay quanh một trục có định Oz vuông góc với
mặt phẳng của nó với vận tốc không đổi. Coi vôlăng là một vòng tròn đồng chất bán
kính r. Bỏ qua khối lượng của các nan hoa và tác dụng của trọng lượng, hãy xác định
lực có khuynh hướng phá vỡ vôlăng (Hình 7).
Giải : Đối với vôlăng, lực cần phải tìm là
nội lực. Để xác định nó ta cắt vôlăng ra
làm hai phần bỏ đi phần phía trái và giữ
lại phần bên phải. Thay vào bằng các lực
. Xác định lực quán tính, vì vôlăng
quay đều nên ε = 0 do đó chỉ có lực quán
tính pháp, do tính chất đối xứng nên các
lực quán tính có hợp lực đặt tại khối tâm
C nằm trên trục Ox và có độ lớn bằng :
21 ,NN
GG
2
ω
CC
qt MxMWR == Hình 7
C
2
N
G
1
N
G
y
x
qt
R
G
O
Trong đó :
π
r
x
g
P
MC
2
,
2
1==
Do đó : g
Rqt
.
Pr 2
π
ω
=
Theo nguyên lý Đalămbe ta có :
(
)
0~,, 21
qt
RNN
G
G
G
Chiếu lên trục Ox :
- N1 – N2 + Rqt = 0
Do tính đối xứng : N1 = N2 = N.
Vậy : g
PRR
N
qt
.22
2
π
ω
==
Chương IV Nguyên lý Đalămbe Trang 62

GIÁO TRÌNH CƠ HỌC LÝ THUYẾT II PHẦN ĐỘNG LỰC HỌC
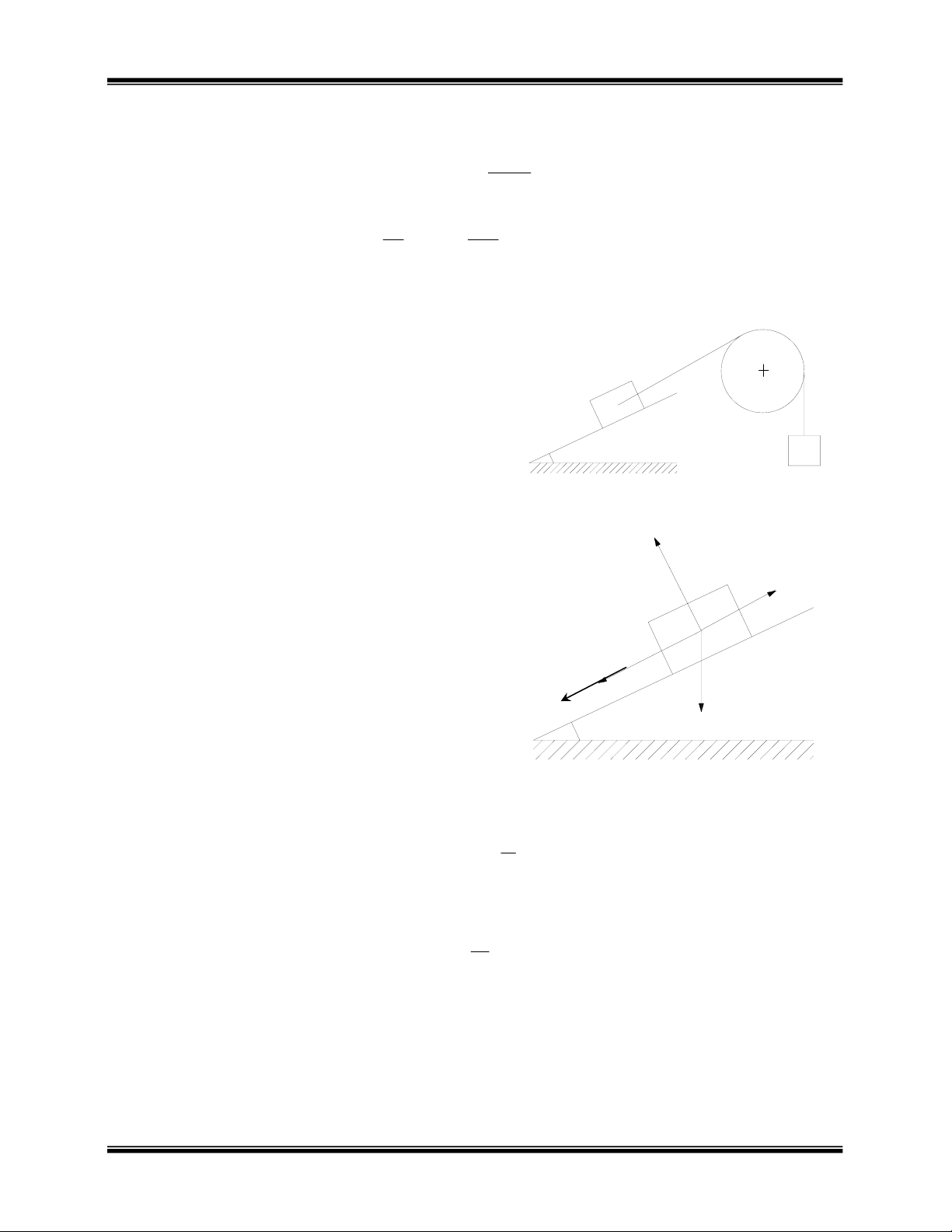
Ví dụ 2 :
Một thanh đồng chất AB trọng
lượng P dài l, được ghép chặt vào
trục thẳng đứng OO1 dưới góc α,
Trục CO1 cùng với thanh AB quay
với vận tốc góc không đổi ω. Hãy xác
định phản lực tại ngàm (Hình 8).
Giải :
Khảo sát chuyển động của thanh
AB. Hệ lực tác dụng :
.
AAAA MZYXP
GGGGG
,,,,
Ta đi xác định lực quán tính các
phần tử của thanh AB.
Hình 8
x
O
B
D
z
y
A
Cqt
R
G
P
G
A
Y
G
A
Z
G
A
X
G
α
Vì ω = const nên chỉ có thành phần qt
kn
F
G
hướng theo bán kính k
r
G
có độ lớn bằng:
2
ω
kkknk
qt
kn rmWmF ==
Đây là hệ lực song song phân bố theo quy luật tam giác.
Thu gọn hệ lực này được hợp lực đi qua điểm D cách A một đoạn bằng 2/3l có độ
lớn bằng :
22 .sin
2
ωαω
l
g
P
r
g
P
MWR CC
qt ===
Theo nguyên lý Đalămbe ta có :
(
)
0~,,,,, qt
AAAA RMZYXP
G
G
G
G
G
G
Thiết lập phương trình cân bằng (Hình 8)
0
0
0cos
3
2
sin
2
0
0
0
==
==
=−+−=
=−=
=+=
=
=
Azz
Ayy
qt
Axx
Az
qt
Ay
Ax
MM
MM
lRM
l
PM
PZR
RYR
XR
αα
Chương IV Nguyên lý Đalămbe Trang 63
GIÁO TRÌNH CƠ HỌC LÝ THUYẾT II PHẦN ĐỘNG LỰC HỌC
Từ đây ta tìm được :
PZ
g
Pl
YX AAA =−== ,sin
2
,0
2
α
ω
0);2sin
3
(sin
2
2
==+= AzAyAx MM
g
lPl
M
α
ω
α
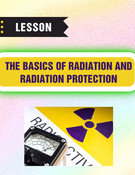
Ví dụ 3:
Vật A và B nối nhau bằng một sợi dây
không giãn mắc qua ròng rọc D. Khi thả vật
A trọng lượng P1 ròng rọc D trọng lượng P3
quay quanh trục cố định O, còn vật B trọng
lượng P2 trượt lên trên mặt phẳng nghiêng α.
Hãy xác định gia tốc của vật A và B và sức
căng của hai nhánh dây. Cho hệ số ma sát
trượt là f. Ròng rọc coi như đĩa tròn đồng
chất. (hình 9).
Giải :
Hệ khảo sát gồm ba vật A, B và ròng rọc
D.
- Xét vật A : Ta tách vật A theo nguyên lý
Đalambe ta có:
(
)
0~,,
1
P
G
1A
qt
FT
GG
.
Trong đó : A
qt
AW
g
P
F=
α
Hình 9
2
T
G
N
G
mg
F
G
qt
B
P
G
2
P
G
α
A
O
Chiếu lên phương X :
0
1
11 =−− A
W
g
P
TP (1)
Xét vật B tương tự ta có :
(
)
0~,,,, 22 ms
qt
BFFNTP
G
G
G
G
G
Trong đó :
Chương IV Nguyên lý Đalămbe Trang 64




















![Đề thi học kì 2 môn Vật lí 1 năm 2023-2024 có đáp án [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/64291778553454.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2023-2024 có đáp án [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/1381778553461.jpg)
![Đề thi học kì 2 Vật lí 1 năm 2022-2023 có đáp án [kèm PDF]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260507/hoahongxanh0906/135x160/21778553462.jpg)


%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)