
48
Chương 5
HỆ THỐNG ĐIỀU KHIỂN BẰNG KHÍ NÉN
5.1. Đặt vấn đề
5.1.1. Mục đích
Trong kỹ thuật điều khiển, các hoạt động của các cơ cấu trong hệ thống điều khiển tự động đều
xuất phát từ các phương trình chuyển động được xây dựng trên nguyên lý làm việc của hệ thống. Các
phương trình này là hàm tích hợp những giá trị của tín hiệu vào và tín hiệu ra và được viết dưới dạng các
biến số của đại số Bool.
5.1.2. Nhiệm vụ
Quá trình định nghĩa tín hiệu vào ra đầy đủ, tuân thủ nguyên lý hoạt động của hệ thống để xây
dựng được các hàm tối ưu, tức giảm thiểu được tối đa các phần tử logic trong thiết kế là một nhiệm vụ
quan trọng trong kỹ thuật điều khiển.
Tùy theo mức độ đơn giản hay phức tạp của hoạt động hệ thống ta có thể có ít hay nhiều phương
trình điều khiển.
5.1.3. Xây dựng bài toán
Để mô tả 1 bài toán thiết kế hay phân tích 1 hệ thống điều khiển bằng khí nén người ta thường
dùng các phương pháp sau:
- Biểu đồ trạng thái.
- Sơ đồ chức năng.
- Lưu đồ tiến trình.
a. Biểu đồ trạng thái
+ Biểu đồ trạng thái biểu diễn trạng thái các phần tử trong mạch, mối liên giữa các phần tử và
trình tự chuyển mạch của các phần tử.
+ Trục tọa độ thẳng đứng biểu diễn trạng thái (hành trình chuyển động, áp suất, góc quay, ...), trục
tọa độ nằm ngang biểu diễn các bước thực hiện hoặc thời gian hành trình. Hành trình làm việc được chia
thành các bước, sự thay đổi trạng thái trong các bước được biểu diễn bằng đường đậm, sự liên kết các tín
hiệu được biểu diễn bằng đường nét mảnh và chiều tác động biểu diễn bằng mũi tên.
+ Xilanh đi ra ký hiệu dấu (+), lùi về ký hiệu (-).
+ Các phần tử điều khiển ký hiệu vị trí “0” và vị trí “1” (hoặc “a”, “b”).
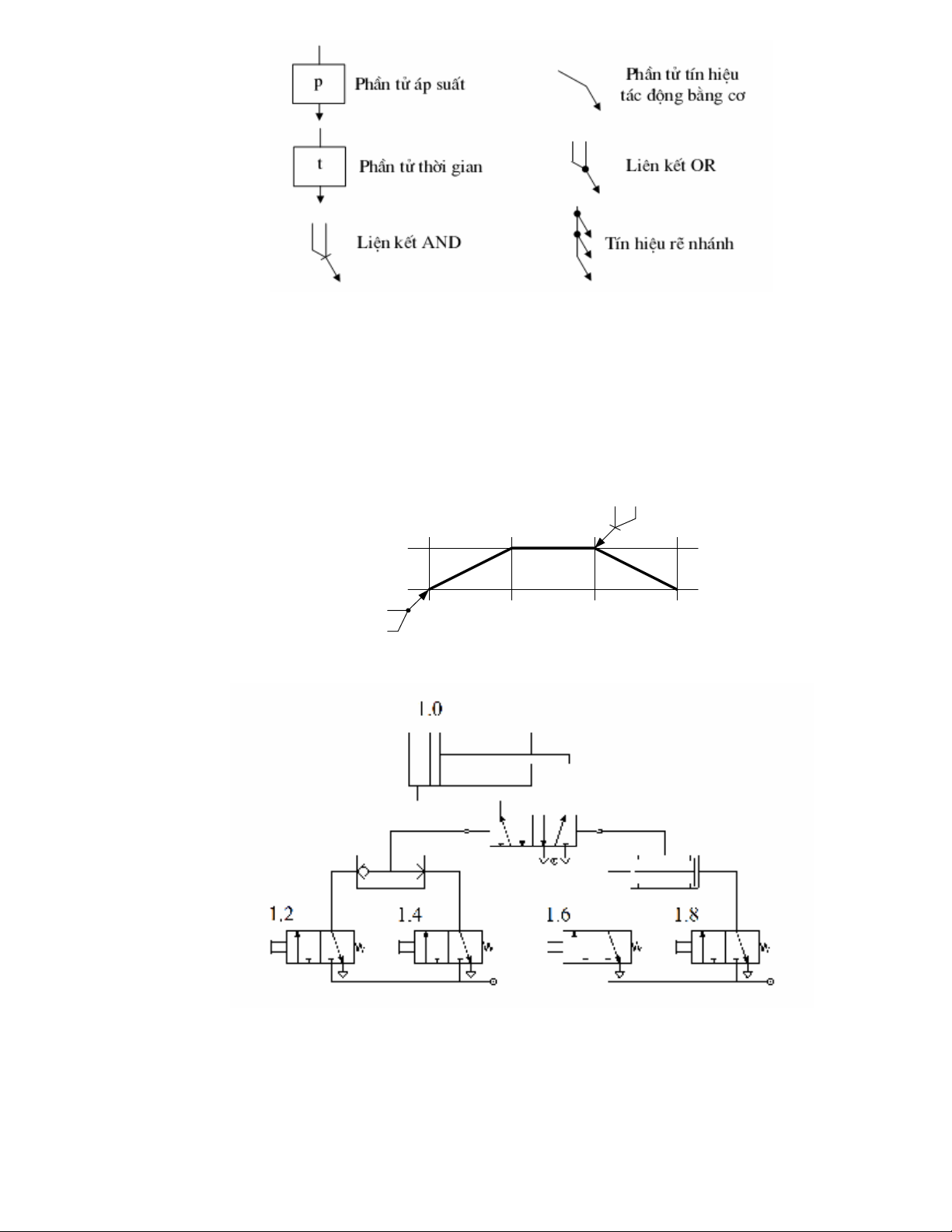
+ Một số ký hiệu biểu diễn biểu đồ trạng thái:
49
Hình 5.1 Một số ký hiệu biểu diễn biểu đồ trạng thái.
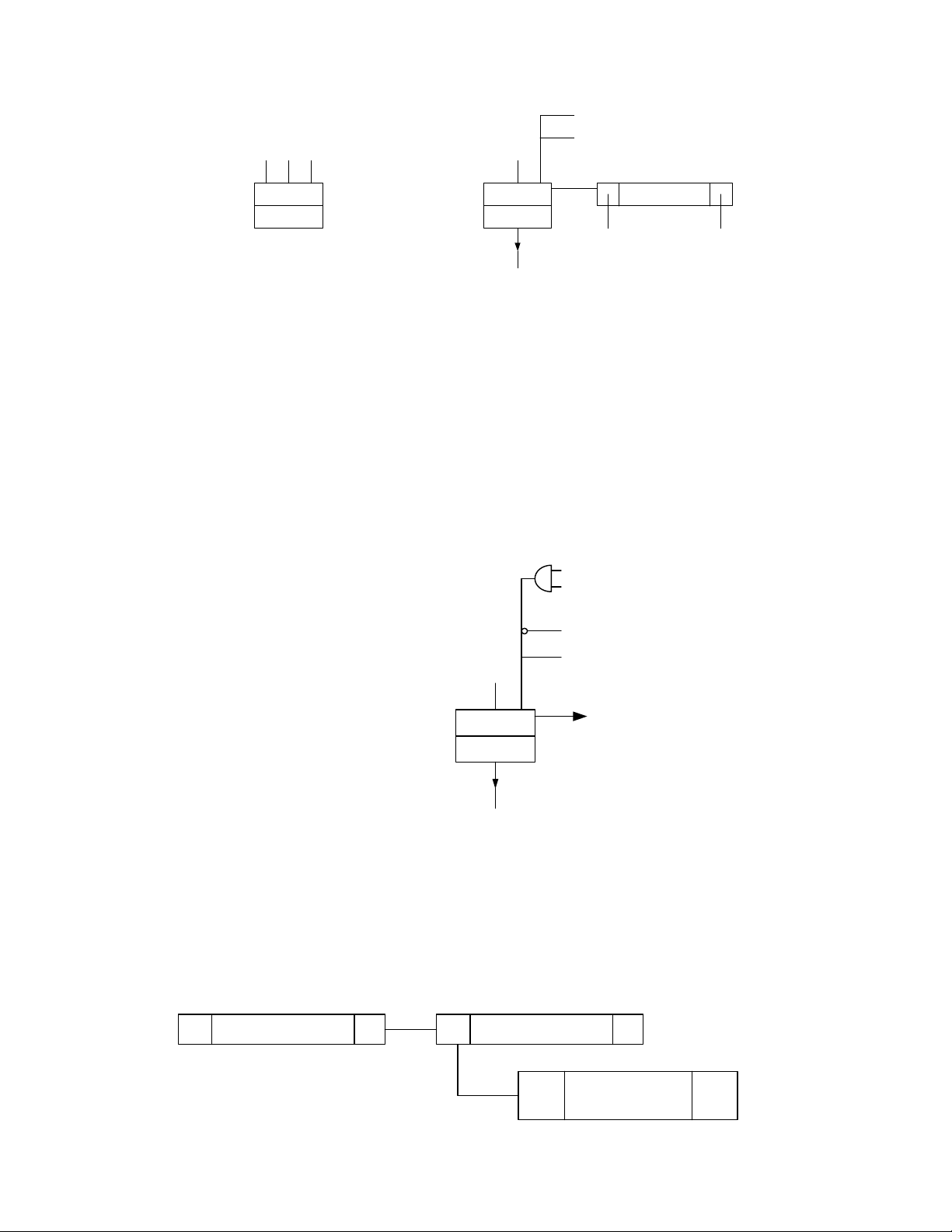
Ví dụ: thiết kế biểu đồ trạng thái của quy trình điều khiển sau: Xylanh tác dụng hai chiều 1.0 sẽ đi
ra, khi nút ấn 1.2 hoặc 1.4. Muốn xylanh lùi về, thì phải đồng thời tác động 2 nút ấn 1.6 và 1.8.
Biểu đồ trạng thái của xylanh 1.0 được biểu diễn ở hình 5.1. Nút ấn 1.6 và 1.8 là liên kết AND,
nút ấn 1.2 và 1.4 là liên kết OR. Xylanh đi ra kí hiệu dấu cộng (+), xylanh đi về ký hiệu dấu trừ (-)
Sơ đồ mạch khí nén của quy trình điều khiển trên được biểu biễn ở hình 5.2
Hình 5.2 Biểu đồ trạng thái của xylanh 1.0
Hình 5.3 Sơ đồ mạch khí nén
b. Sơ đồ chức năng
+ Kí hiệu
50
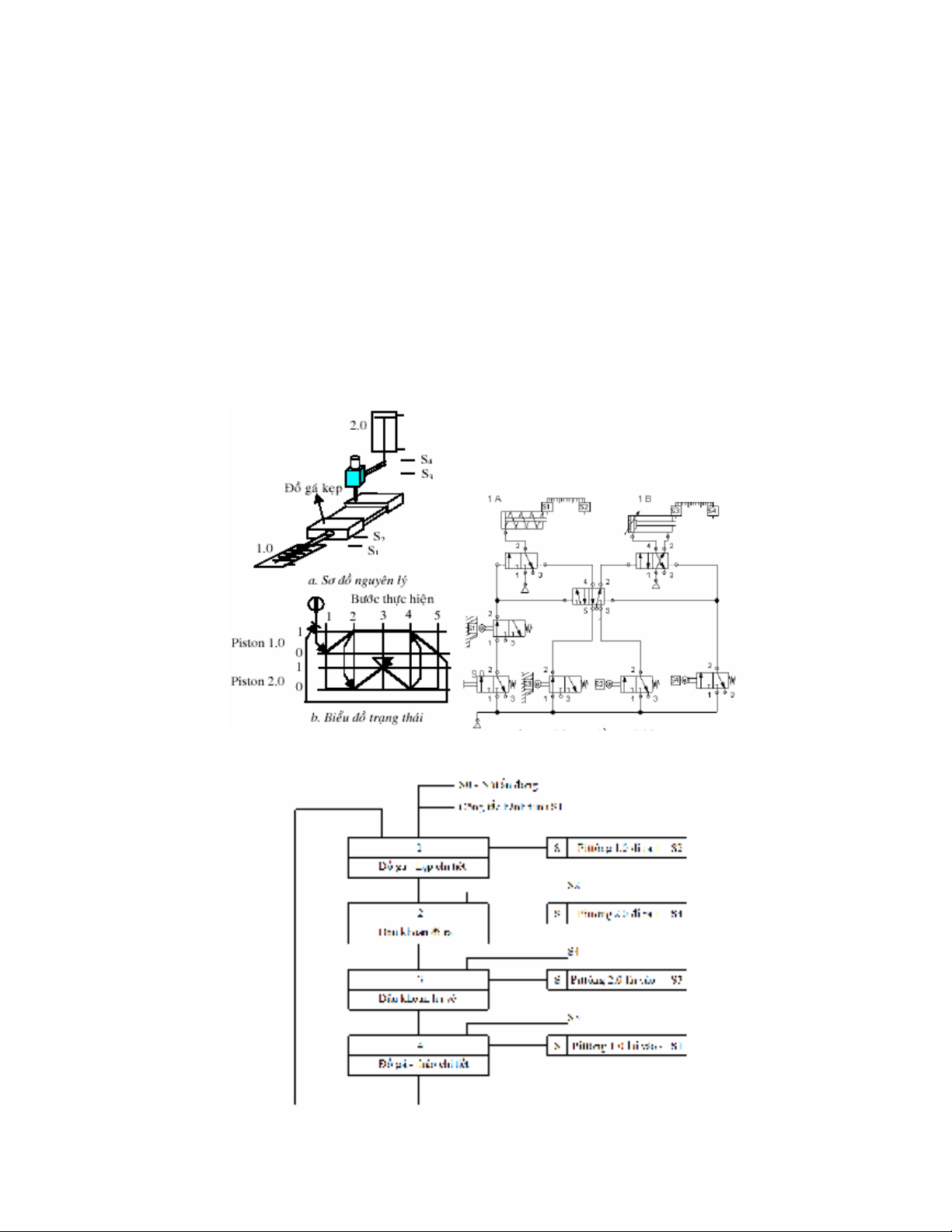
Sơ đồ chức năng bao gồm các lệnh và các bước thực hiện. Các bước thực hiện được kí hiệu theo
số thứ tự và các lệnh gồm tên loại, loại lệnh và vị trí ngắt của lệnh (hình 5.3).
Hình 5.4 Ký hiệu các bước và thực hiện lệnh của sơ đồ chức năng theo DIN 49719
Ký hiệu bước thực hiện được biểu diễn ở hình 5.4
Tín hiệu ra a1 của bước thực hiện điều khiển lệnh thực hiện (van đảo chiều, xylanh, động cơ) và
được biểu diễn những đường thẳng nằm bên phải và phía dưới ký hiệu của bước thực hiện.
Tín hiệu vào được biểu diễn bằng những đường thẳng nằm phía trên và bên trái của ký hiệu bước
thực hiện
Bước thực hiện thứ n sẽ có hiệu lực, khi lệnh của bước thực hiện thứ n-1 trước đó phải hoàn
thành, và đạt được vị trí ngắt của lệnh đó. Bước thực hiện thứ n sẽ được xóa khi các bước thực hiện tiếp
sau đó có hiệu lực.
Hình 5.5 Ký hiệu bước thực hiện
Ký hiệu lệnh thực hiện được biểu diễn ở hình 5.5, gồm 3 phần: tên lệnh, loại lệnh và vị trí ngắt
lệnh. Tín hiệu ra kí hiệu của lệnh có thể không cần biểu diễn ở ô vuông bên phải của ký hiệu.
Ví dụ: tín hiệu ra a1 sẽ điều khiển van đảo chiều V1 bằng loại lệnh SH (loại lệnh nhớ, khi dòng
năng lượng trong hệ thống mất đi). Với tín hiệu ra A1 từ van đảo chiều sẽ điều khiển pittông Z1 đi ra với
loại lệnh NS (không nhớ).
Hình 5.6 Ký hiệu lệnh thực hiện
51
S Loại lệnh nhớ
NS Loại lệnh không nhớ
SH Loại lệnh nhớ, mặc dù dòng năng lượng trong hệ thống mất đi
T Loại lệnh giới hạn thời gian
D Loại lệnh bị chậm trễ
SD Loại lệnh nhớ và bị chậm trễ
NSD Loại lệnh không nhớ, nhưng chậm trễ
ST Loại lệnh nhớ và giới hạn thời gian
+ Thiết kế sơ đồ chức năng
Nguyên lý làm việc của máy khoan bàn như sau: sau khi chi tiết được kẹp (xylanh 1.0 đi ra) đầu
khoan bắt đầu đi xuống (xylanh 2.0) và khoan chi tiết. Khi đầu khoan đã lùi trở về, thì chi tiết được tháo
ra (xylanh 1.0 lùi trở về).
Hình 5.7 Nguyên lý làm việc của máy khoan và sơ đồ mạch điều khiển khí nén
Hình 5.8 Sơ đồ chức năng với tín hiệu ra của lệnh trực tiếp tác động lên cơ cấu chấp hành
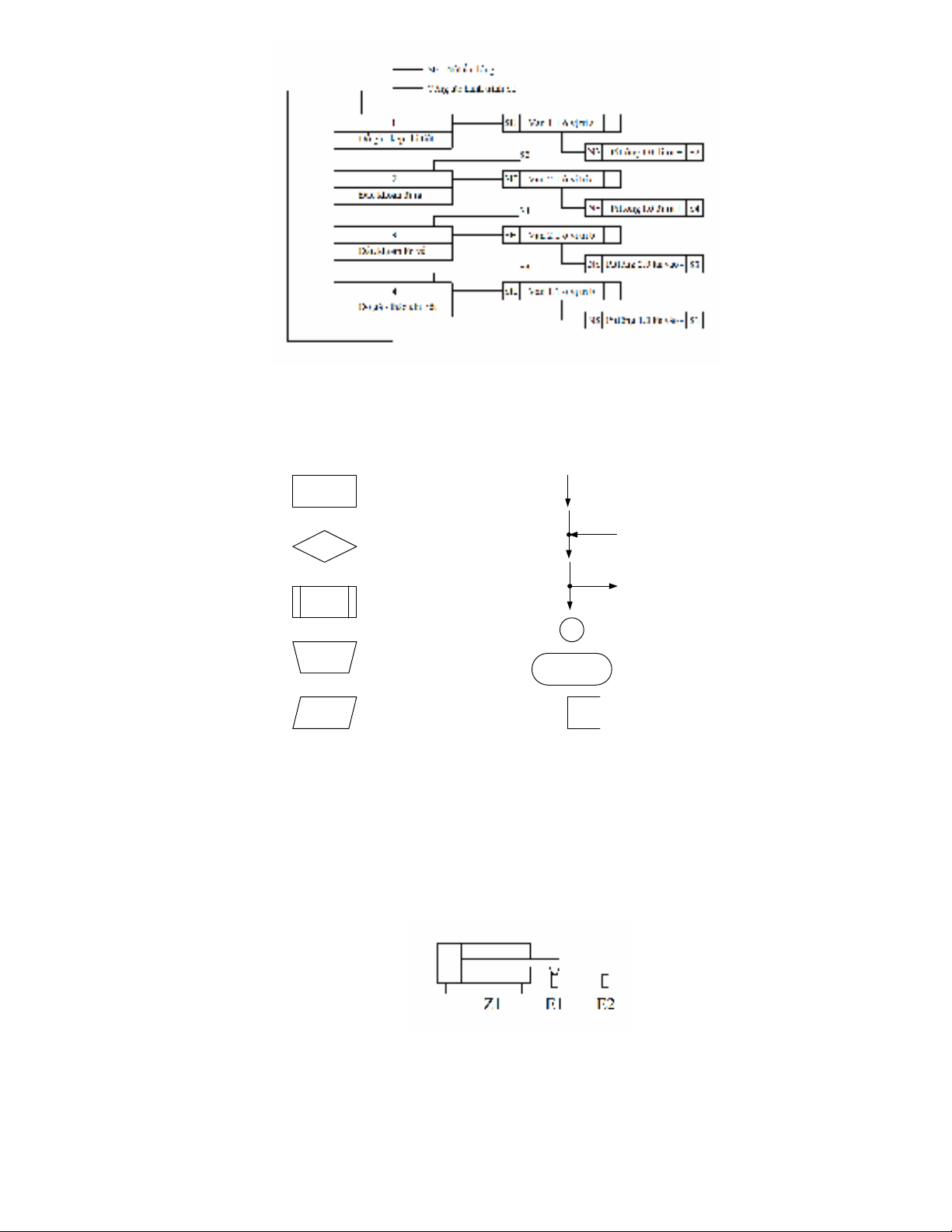
52
Hình 5.9 Sơ đồ chức năng với tín hiệu ra của ký hiệu lệnh trực tiếp tác động lên van đảo chiều
c. Lưu đồ tiến trình
Ký hiệu để biểu diễn lưu đồ tiến trình theo DIN 66 001 được trình bày trên hình sau
Hình 5.10 Ký hiệu biểu diễn lưu đồ tiến trình
Lưu đồ tiến trình biểu diễn phương thức giải của một quá trình điều khiển. Lưu đồ tiến trình
không biểu diễn những thông số và phần tử điều khiển. Lưu đồ tiến trình có ưu điểm là vạch ra hướng
tổng quát của quá trình điều khiển và có tác dụng như là phương tiện thông tin giữa người sản xuất phần
tử điều khiển và kỹ thuật viên sử dụng phần tử đó.
Ví dụ thiết kế lưu đồ tiến trình:
Nguyên tắc hoạt động của mạch điều khiển ở hình được thực hiện như sau
- Khi pittông ở vị trí ban đầu (E1 = 1/ E2 = 0) nút ấn khởi động E0 tác động, pittông đi ra (Z1 +)
- Khi pittông đi ra đến cuối hành trình, chạm công tắc hành trình E2, pittông sẽ lùi về (Z1 -)
- Tại vị trí ban đầu, pittông chạm công tắc hành trình E1, quá trình điều khiển kết thúc.
![Sơ đồ thủy lực nghiền xi măng: [Hướng dẫn chi tiết/ Tìm hiểu ngay]](https://cdn.tailieu.vn/images/document/thumbnail/2017/20170425/frankincense/135x160/801493105449.jpg)

![Bảng tính thủy lực: Tổng hợp các loại [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2015/20151209/readthe1303/135x160/1244909860.jpg)









![Giáo trình Tính toán thiết kế hệ thống máy lạnh và điều hoà không khí (CĐ) - Trường Cao đẳng Công nghiệp Thanh Hóa [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260511/hoabattu2026/135x160/70831778842526.jpg)













%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)