MINISTRYOFEDUCATION
ANDTRAINING
VIETNAMACADEMYOFSCIENCE
ANDTECHNOLOGY
GRADUATE UNIVERSITY OF SCIENCE AND TECHNOLOGY
……..….***…………
NGUYEN DINH DUNG
INVERSE DYNAMICS AND MOTION CONTROL
OF DELTA PARALLEL ROBOT
Major:EngineeringMechanics
Code:9520101
SUMMARY OF THE DOCTORAL THESIS
Hanoi – 2018
The thesis has been completed at Graduate University of Science and
Technology,VietnamAcademyofScienceandTechnology
Supervisor1:Prof.Dr.Sc.NguyenVanKhang
Supervisor2:Assoc.Prof.Dr.NguyenQuangHoang
Reviewer1:Prof.Dr.DinhVanPhong
Reviewer2::Prof.Dr.TranVanTuan
Reviewer3::Assoc.Prof.Dr.LeLuongTai
ThethesisisdefendedtothethesiscommitteefortheDoctoralDegree,at
Graduate University of Science and Technology - Vietnam Academy of
ScienceandTechnology,onDateMonth
Year2018
Hardcopyofthethesiscanbefoundat:
- LibraryofGraduateUniversityofScienceandTechnology
- NationalLibraryofVietnam

1
INTRODUCTION
The rationale for the thesis
Parallelrobotsarerobotswithclosedkinematicsstructureinwhichthe
links are connected by joints. Although the parallel robot has a complex
dynamic structure, and is difficult to design and control, but it has some
outstanding advantages over the serial robot: high load bearing capacity,
highrigidityduetoconfiguration.Theycanperformcomplexoperationsand
operate with high accuracy. Therefore, study on theproblem of dynamics
andcontroloftheparallelrobotinordertotakeadvantageofitisascientific
andpracticalmatter.
2. The objective of the thesis
The objective of this thesis is to apply Lagrange equations with
multipliers to study dynamics and control of Delta parallel robots.
Particularly,mechanicalmodel,mathematicalmodel,andcontrolalgorithms
forDeltaparallelrobotsaredevelopedasascientificbasisfortheresearch
anddevelopmentofparallelDeltarobots.
3. The object and the main content of the thesis
Researchobjects:DynamicsandcontroloftwoDeltaparallelrobotsare
3RUSrobotsand3PUSrobots.
The main content of the thesis includes: Study of mathematical and
mechanical modeling problems, study of dynamics and control algorithms
forDeltaparallelrobot.Thethesisdoesnotstudytheproblemofdesignand
manufactureofDeltaparallelrobots.
4. The outline of the thesis
The outline of the thesis contains Introduction, Four main chapters,
Conclusionsandfindingsofthethesis.
Chapter 1: Overview of the study of dynamics and control of Delta
parallel robot in and outside the country is first presented. Since then, the

2
directionofthethesishasbeenselectedtoaddressscientificsignificanceand
practicalapplication.
Chapter 2: Presents the construction of mechanical models and
application of Lagrangian equations with multipliers to formulate
mathematicalmodels fortwoDeltaParallelRobots.Eachrobotofferstwo
mechanicalmodelsforstudyandcomparison.
Chapter3:Presentssomeimprovementsinnumericalmethodstosolve
the inverse kinematics and inverse dynamics of parallel robots. Inverse
kinematic problem is solved by applying the improved Newton-Raphson
method. Inverse dynamics problem is solved by reducing Lagrange
multiplierstocalculatemomentsordrivingforcesinactivejoints.
Chapter 4: Presents tracking control of parallel robot manipulators
based on the mathematical model of parallel robots, which isa system of
differential–algebraicequations.Thetrajectoryofserialrobotsdescribed
bydifferentialequationsisoftenwellstudied.WhiletheDeltaparallelrobot
trajectory is based on the mathematical model, the differential – algebraic
equations system is rarely studied. Control law such as PD control, PID
control,slidingmodecontrol,slidingmodecontrolusingneuralnetworkare
studiedinthischapter.
CHAPTER 1. OVERVIEW OF DYNAMICS AND CONTROL
PARALLEL ROBOT
1.1. Parallel robot
Parallel robots usually consist of a manipulator connected to a fixed
frame,driveninmultipleparallelbranchesalsocalledlegs.Thenumberof
legsisequaltothenumberofdegreesoffreedom.Eachlegiscontrolledby
the actuator on afixed frame or on the leg. Therefore, parallel robots are
sometimesreferredtoasplatformedrobots.
1.2. Comparison between Serial and Parallel Manipulators
3
Parallel robot has high rigidity and load bearing capacity due to load
sharingofeachactuatoroperatinginparallel.Theaccuracyofthepositionof
theparallelrobotishighbecausetherearenocumulativejointerrorsasthe
serial robot. While kinematic chains create kinematic constraints and
workspacelimitations,typicaldesignshavelowinertiacharacteristics.The
fields of parallel robot application include: CNC machine, high precision
machine, automation machine in semiconductor and high speed and high
acceleration electronics assembly industry. A comparison between parallel
andserialrobotsisgiveninthefollowingtable:
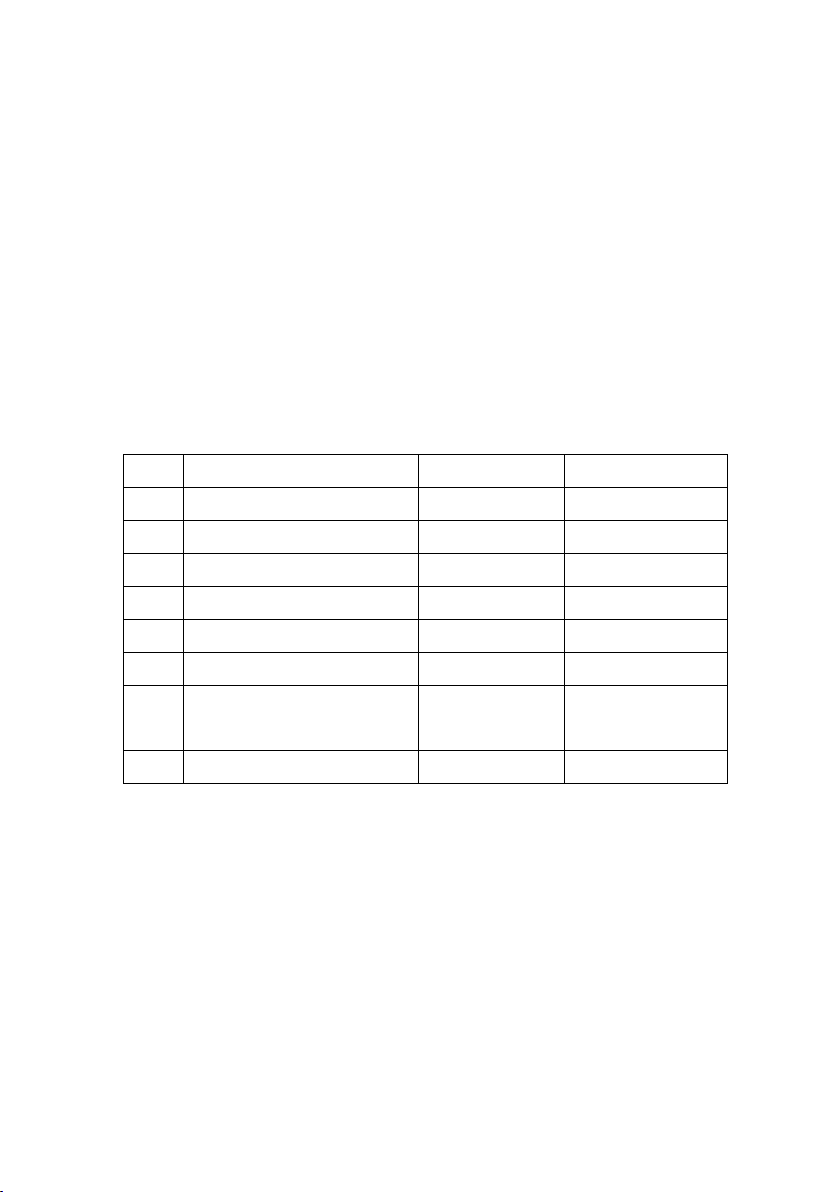
Table 1.1: Comparison between Serial and Parallel Manipulators
STT Features Serial robot Parallel robot
1 Accuracy Lower Higher
2 Workspace Large Small
3 Stiffness Low High
4 Payload Low High
5 Inertial Large Small
6 Speed Low High
7 Design/control
complexity
Simple complex
8 Singularityproblem Some Abundant
1.3. Research on dynamics and control of parallel robots outside of
the country
1.3.1. Inverse dynamics of parallel robots
On the mechanical side, parallel robots are closed-loop multibody
system. Dynamic computation is essential to designing and improving the
controlqualityofparallelrobots.Theliteratureonthetheoryandcalculation
methodofrobotdynamicsisquitesubstantial[47,73,85-88,96,103].The
methods of establishing the dynamic equations of closed-loop multibody






![Robot tự vận hành: Đề tài nghiên cứu khoa học [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2024/20240119/boghoado07/135x160/896608541.jpg)






![Thiết kế mạch điện tử: Đồ án môn học [chuẩn nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20250930/ngotien0801@gmail.com/135x160/55401759287195.jpg)