Tài liệu kỹ thuật
BKpro – http://www.bkpro.info
Tài liệu kỹ thuật từ Bkpro
Trang - 1 -
KỸ THUẬT DÒ ĐƯỜNG
Trong bài này chúng tôi giới thiệu với các bạn giả thuật Robot dò đường.
Điều khiển Robot dò đường hiện nay đã có rất nhiều đội làm được và rất ổn định.
Tuy nhiên giả thuật của mỗi đội thường theo ý tưởng của riêng mình và theo kinh
nghiệm.Chúng tôi làm việc theo tinh thần “sáng tạo Robot”, vì vậy chúng tôi chỉ
đưa ra sơ đồ giải thuật để góp ý cùng các bạn xây dựng nên một chương trình
hoàn hảo. Với mỗi đội nên có một bản sắc cho riêng mình trên cơ sở một giả
thuật chung ổn định.
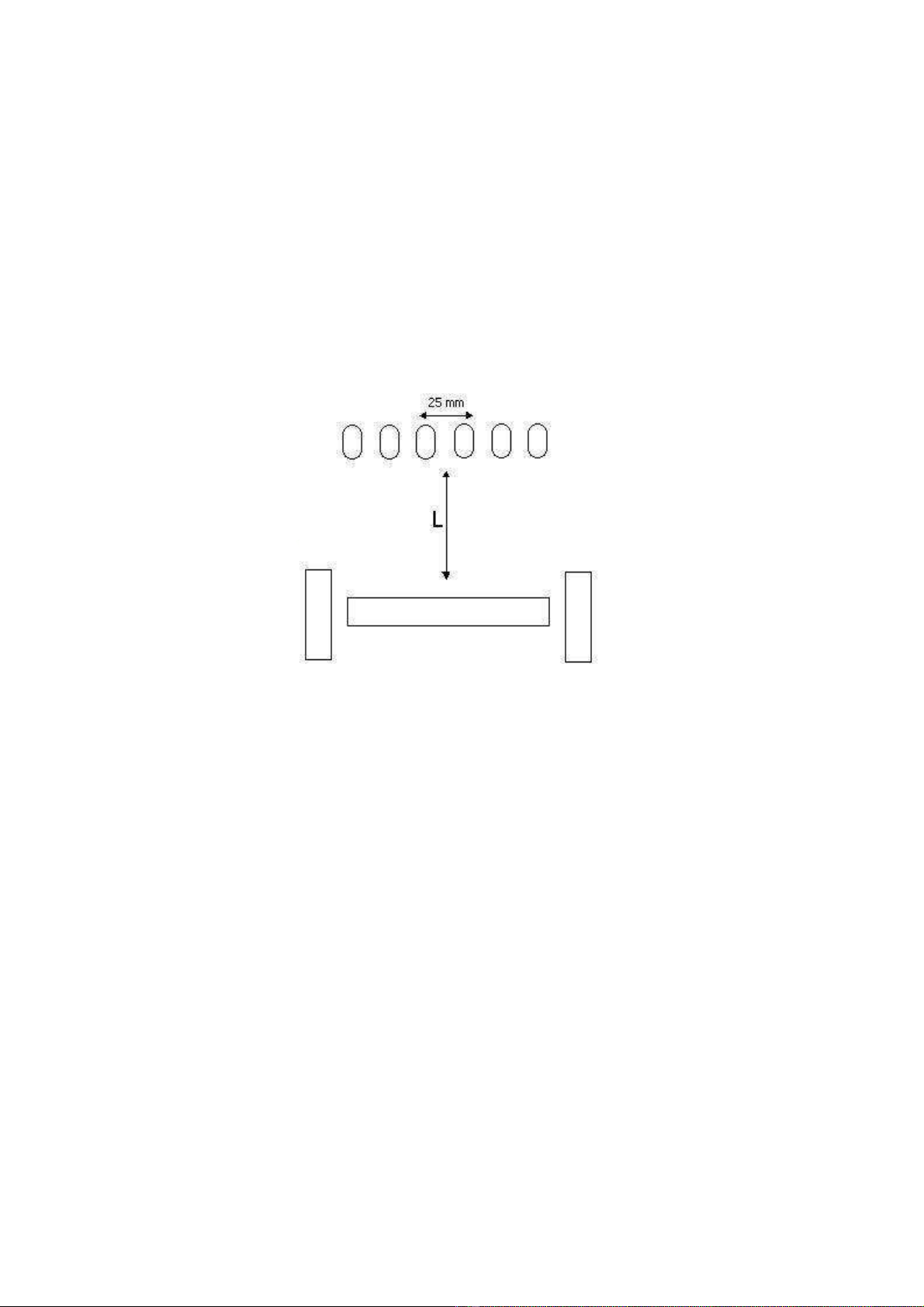
Giả thuật Robot dò đường bằng 6 led.
Sơ đồ bố trí :
Ta chia 6 cảm biến thành 13 vùng:
Chú ý: ledn cảm biến n tích cực.
/ledn cảm biến n không tích cực.
+ Vùng trung tâm : led3+ led4
+Vùng trái 1 : /led2 + led3 + /led4
+Vùng trái 2 : led2 + led3
+Vùng trái 3 : /led1 + led2 +/led3
+Vùng trái 4 : led1 + led2
+Vùng trái 5 : led1 + /led2
+Vùng trái 6 : bit nhớ trái + /led1
+Vùng phải 1 : /led3 + led4 + /led5
+Vùng phải 2 : led4 + led5
+Vùng phải 3 : /led4 + led5 +/led6
+Vùng phải 4 : led5 + led6
+Vùng phải 5 : /led5 + led6
+Vùng phải 6 : bit nhớ phải + /led6
Bit nhớ = 1 khi tất cả cảm biến lệch ra khỏi đường line theo hướng
trái (bit nhớ phải) và theo hướng phải (bit nhớ trái). Ví dụ Bit nhớ phải
được set trong trường hợp /5led + led6 và được clr khi led4 +led5
Tài liệu kỹ thuật
BKpro – http://www.bkpro.info
Tài liệu kỹ thuật từ Bkpro
Trang - 2 -
Ứng với mỗi vùng ta xây dựng 1 hàm vận tốc tương ứng để có thể
điều khiển vận tốc linh hoạt. Phần điều xung chúng tôi đã đề cập ở Bài 2.
Ví dụ :
Vùng trung tâm: MOV V_bánhphải,#255
MOV V_bánhtrái,#255
Vùng phải 1: MOV V_bánhphải,#200
MOV V_bánhtrái,#255
Chú ý:
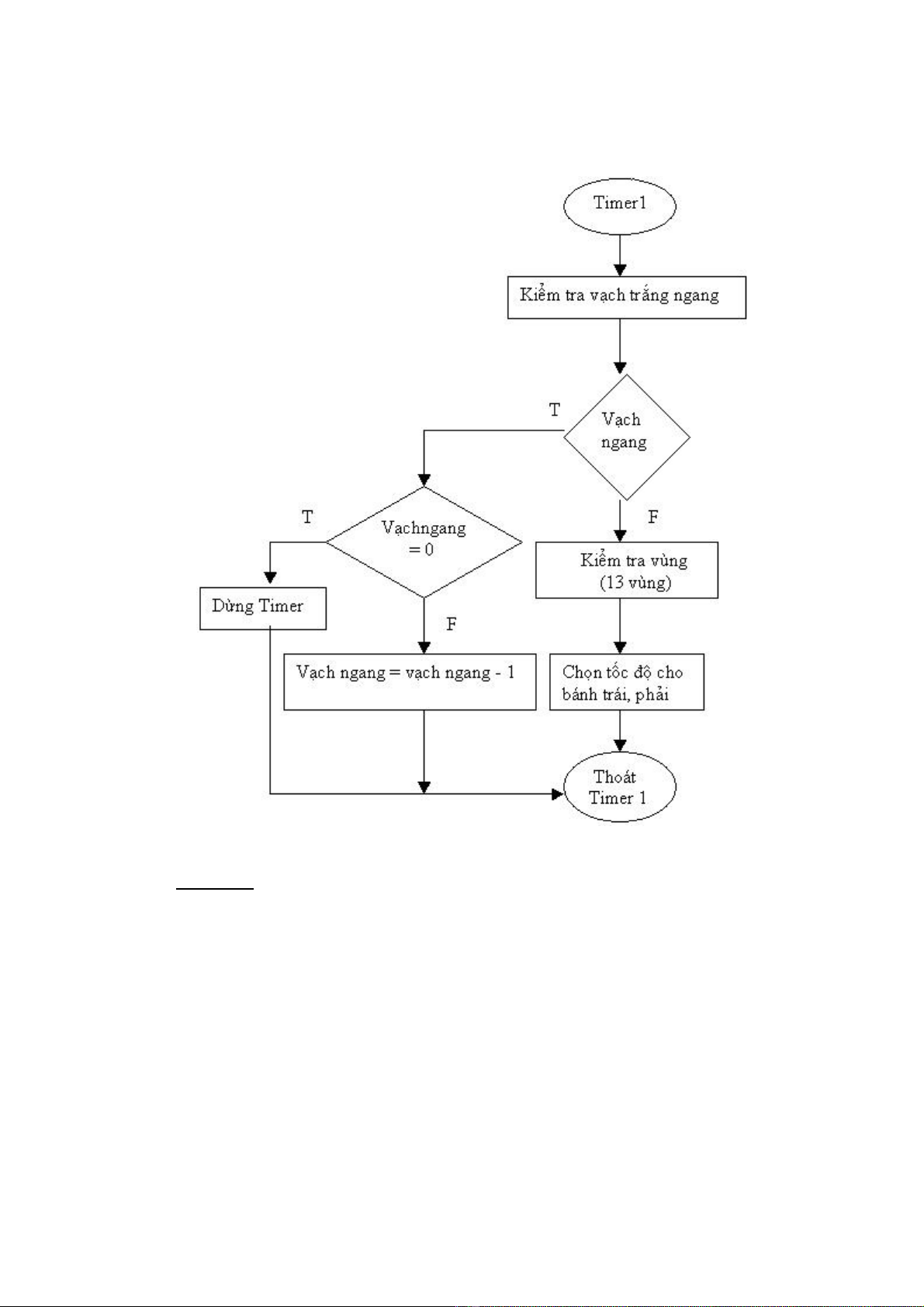
· Chương trình dò đường đặt trong Timer 1.
· Chương trình quét led và Timer out đặt trong Timer 2.
· Các hoạt động của Robot xây dựng thành các chương trình con.
Ví dụ : cua phải, cua trái, gắp quà ...
· 1 vạch trắng ngang ứng với trường hợp có 4 (hoặc 5 hoặc 6 led tích
cực tuỳ thuộc vào mức độ chống nhiễu mà người lập trình tuỳ chọn).
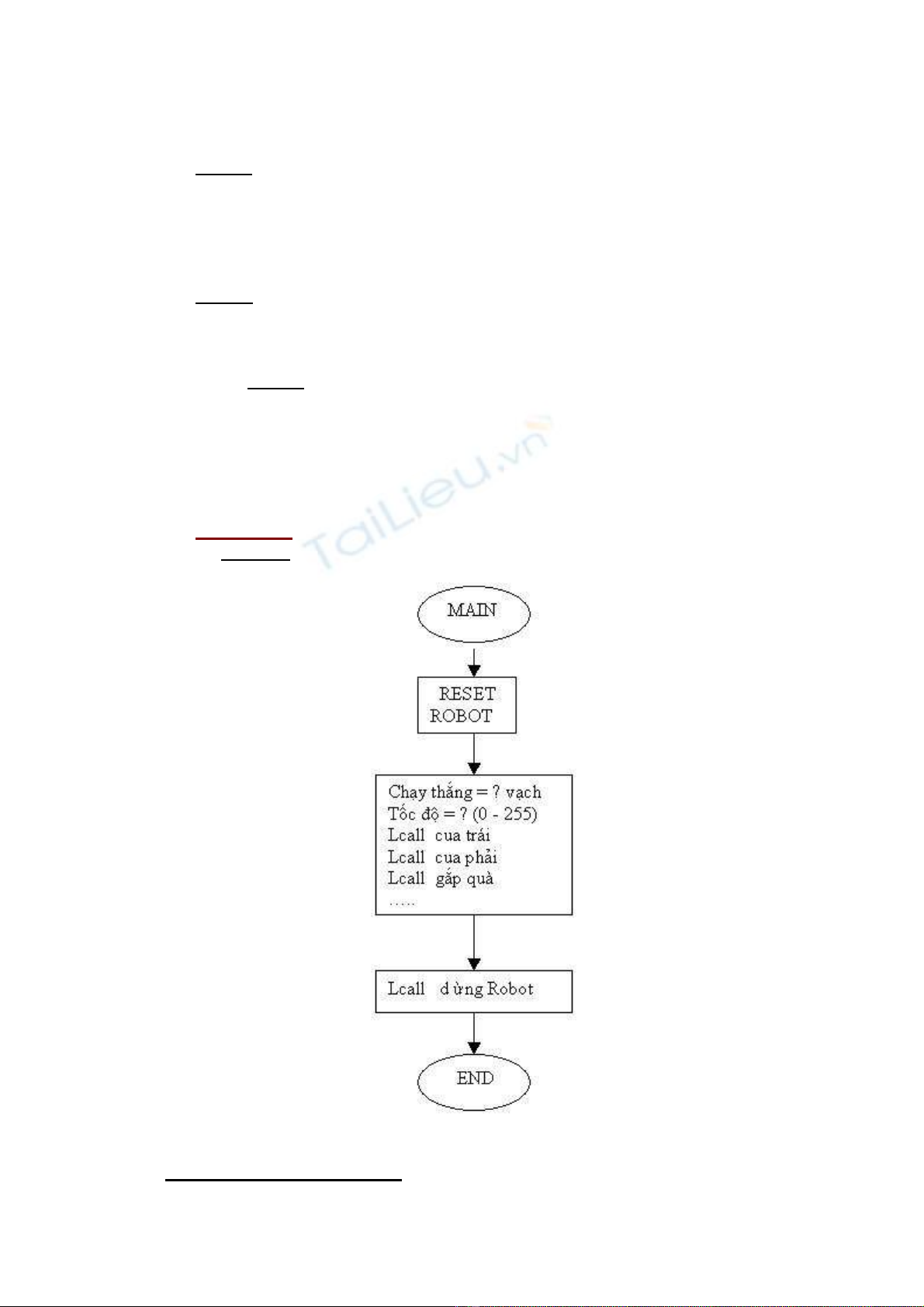
· Chương trình được xây dựng sao cho ở chương trình MAIN ta chỉ
cần gọi chạy thẳng bao nhiêu vạch ứng với tốc độ bao nhiêu, cua trái,
phải, gắp quà,…nhằm đơn giản cho người sử dụng và linh hoạt khi thay
đổi chương trình.
Gii thut :
· MAIN :
· Chương trình dò đường :
Tài liệu kỹ thuật
BKpro – http://www.bkpro.info
Tài liệu kỹ thuật từ Bkpro
Trang - 3 -
Timer1 sẽ quét liên tục sau mỗi 1ms (tuỳ vào giá trị đặt), sẽ dừng khi bit
TR1= 0 lúc Robot hoàn thành xong quãng đường cần đi.
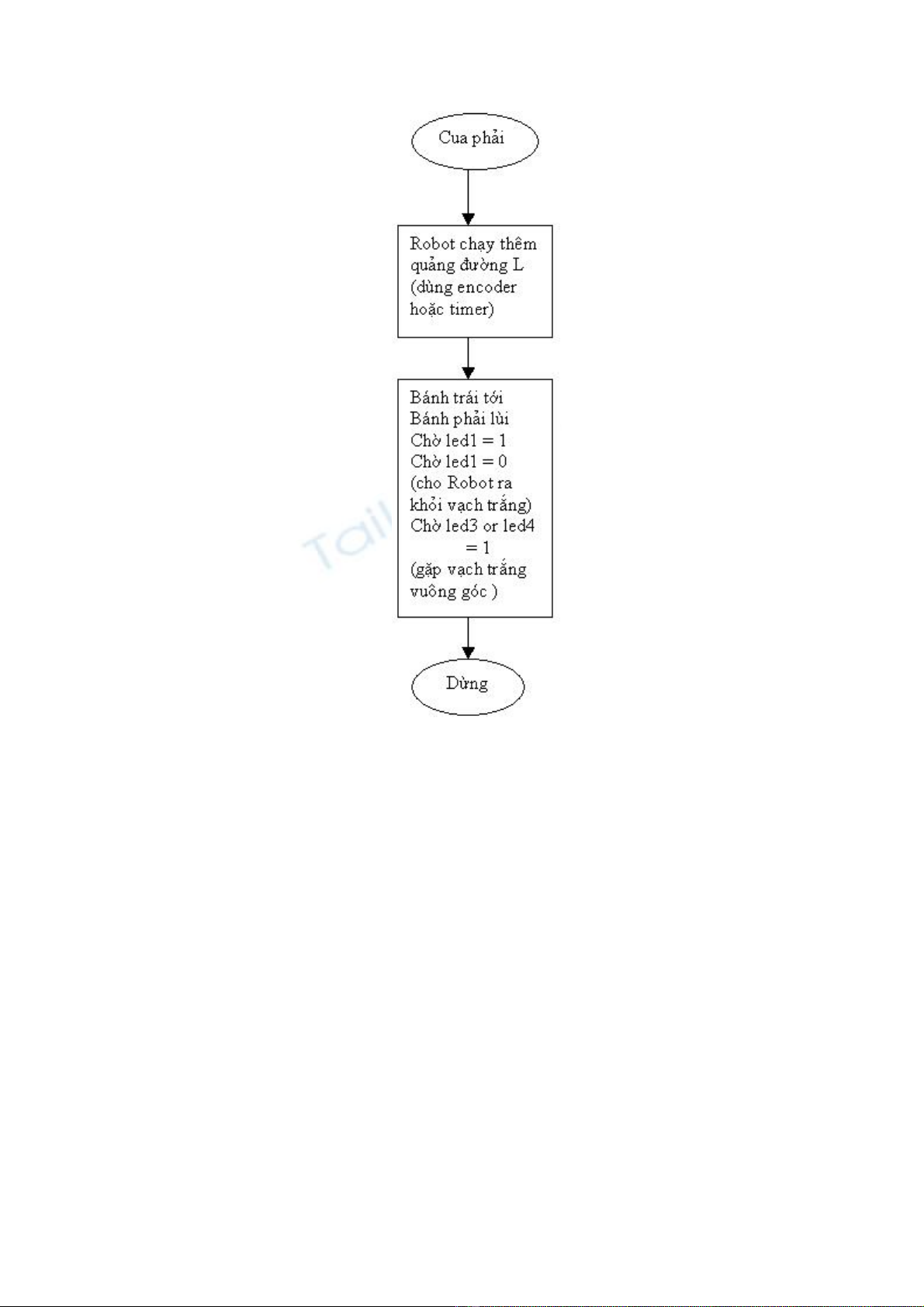
· Cua 90:
Tài liệu kỹ thuật
BKpro – http://www.bkpro.info
Tài liệu kỹ thuật từ Bkpro
Trang - 4 -
Khi chương trình dò đường chỉ sử dụng cảm biến thành công. Chúng ta
có thể kết hợp với các thiết bị như encoder, la bàn … để tăng tính ổn đinh, chính
xác và linh hoạt cho Robot.
Chúc các bạn thành công !
Mọi thắc mắc xin liên hệ Bkpro.









![Robot song song P2: [Thêm từ mô tả hấp dẫn, ví dụ: Hướng dẫn chi tiết, Cách chế tạo hiệu quả]](https://cdn.tailieu.vn/images/document/thumbnail/2010/20100323/tanlang/135x160/robot_song_song_2_9234.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)