
HARDWARE C AỦ
SOCCER ROBOT

2.1 Gi i thi u chung v hardware c a soccer robot:ớ ệ ề ủ
Soccer robot bao g m CPU MR188 board, board đi u khi n đ ng c , RF(vô tuy n)ồ ề ể ộ ơ ế
module.Đ tăng s ho t đ ng c a robot, b đi u khi n CPLD đ c s d ng đ đi uể ự ạ ộ ủ ộ ề ể ượ ử ụ ể ề
khi n đ r ng xung PWM đ ng c và các tín hi u encoder.CPLD là ph ng ti n tr giúpể ộ ộ ộ ơ ệ ươ ệ ợ
cho vi c l p trình đi u khi n.ệ ậ ề ể
Hardware c a robot c th nh sau:ủ ụ ể ư
•CPU:Kích th c 72mmx46mm(MR188A1 Board)ướ
• RF và Motor Control Board:71.5mmx72.5mm
• DC motor:
-H p s : 7.5:1ộ ố
-T c đ t i đa:1.5m/s.ố ộ ố
•Encoder: 512 pulse/vòng
• Pin: 7.2V,450mAh
• RF Module: BiM-418 ho c BiM-433ặ
• Driver đ ng c DC:L298ộ ơ
• DC motor controller: CY37128(CPLD)
2.2 RF Module:
2.2.1 RF Module là gì?
RF (Radio Frequency) module là thi t b s d ng đ truy n thông sóng vô tuy n.ế ị ử ụ ề ề ế
Trong tr ng h p này t n s sóng vô tuy n đ c p đ n sóng đi n thông d ng và không chườ ợ ầ ố ế ề ậ ế ệ ụ ỉ
là t n s vô tuy n phát thanh. RF module có th đ c phân lo i theo t n s , ph ng phápầ ố ế ể ượ ạ ầ ố ươ
đi u bi n (s bi n đ i c a tín hi u d ng s sang d ng t ng t , th ng dùng trong truy nề ế ự ế ổ ủ ệ ạ ố ạ ươ ự ườ ề
tín hi u qua các h th ng vi n thông), d li u, c ng đ ngõ ra…ệ ệ ố ễ ữ ệ ườ ộ
2.2.2 Charisma RF Board:
M ch giao ti p vô tuy n Charisma chuy n đ i d li u n i ti p RS232 sang d li uạ ế ế ể ổ ữ ệ ố ế ữ ệ
RF và ng c l i. Charisma Board có th d dàng k t n i v i các thi t b s d ng c ngượ ạ ể ễ ế ố ớ ế ị ử ụ ổ
RS232. Charisma đ c thi t k s d ng RadioMetrix BiM,TX2 hay RX2ượ ế ế ử ụ

modules. PC và PC cũng có th giao ti p đ c v i nhau n u c 2 PC đ u k t n i v iể ế ượ ớ ế ả ề ế ố ớ
Charisma board.
2.3 Radiometrix BiM-UHF:
2.3.1 Đ nh nghĩa và ng d ng Radiometrix:ị ứ ụ
BiM-418-F và BiM-433F là nh ng module vô tuy n UHF thu nh có kh năng truy nữ ế ỏ ả ề
d li u đ n công v i t c đ lên đ n 40Kbit/s và kho ng cách truy n lên đ nữ ệ ơ ớ ố ộ ế ả ề ế
30m(trong nhà) và 120m(ngoài tr i).ờ
T n s T c đ Kho ng cách Ngu n Antenầ ố ố ộ ả ồ
BiM-418-F 418MHz 40K bps 30-120m 4.5V-5.5V 16.5cm
BiM-433-F 433.92MHz 40H bps 30-120m 4.5V-5.5V 16.5cm
Module này tích h p b phát UHF FM năng l ng th p, b thu đ i t n s phù h pợ ộ ượ ấ ộ ổ ầ ố ợ
v i ph c h i d li u và nh ng m ch chuy n đ i TX/RX đ cung c p m t gi i pháp kinhớ ụ ồ ữ ệ ữ ạ ể ổ ể ấ ộ ả
t trong th c hi n vi c liên k t d li u b ng sóng vô tuy n t m ng n theoế ự ệ ệ ế ữ ệ ằ ế ầ ắ
2 chi u. T c đ d li u cao (40kbit/s) và s chuy n đ i TX/RX nhanh(<1ms) làm cho bề ố ộ ữ ệ ự ể ổ ộ
phát BiM lý t ng cho vi c truy n nguyên v n thông tin c a nh ng liên k t one-to-one vàưở ệ ề ẹ ủ ữ ế
m ng.ạ
Nh ng ng d ng th c t c a module:ữ ứ ụ ự ế ủ
•Nh ng m ng máy tính có t c đ trung bình.ữ ạ ố ộ
• Nh ng báo đ ng v an ninh/c u h a.ữ ộ ề ứ ỏ
• Vi c đi u khi n / hi n th trong các tòa nhà.vvệ ề ể ể ị
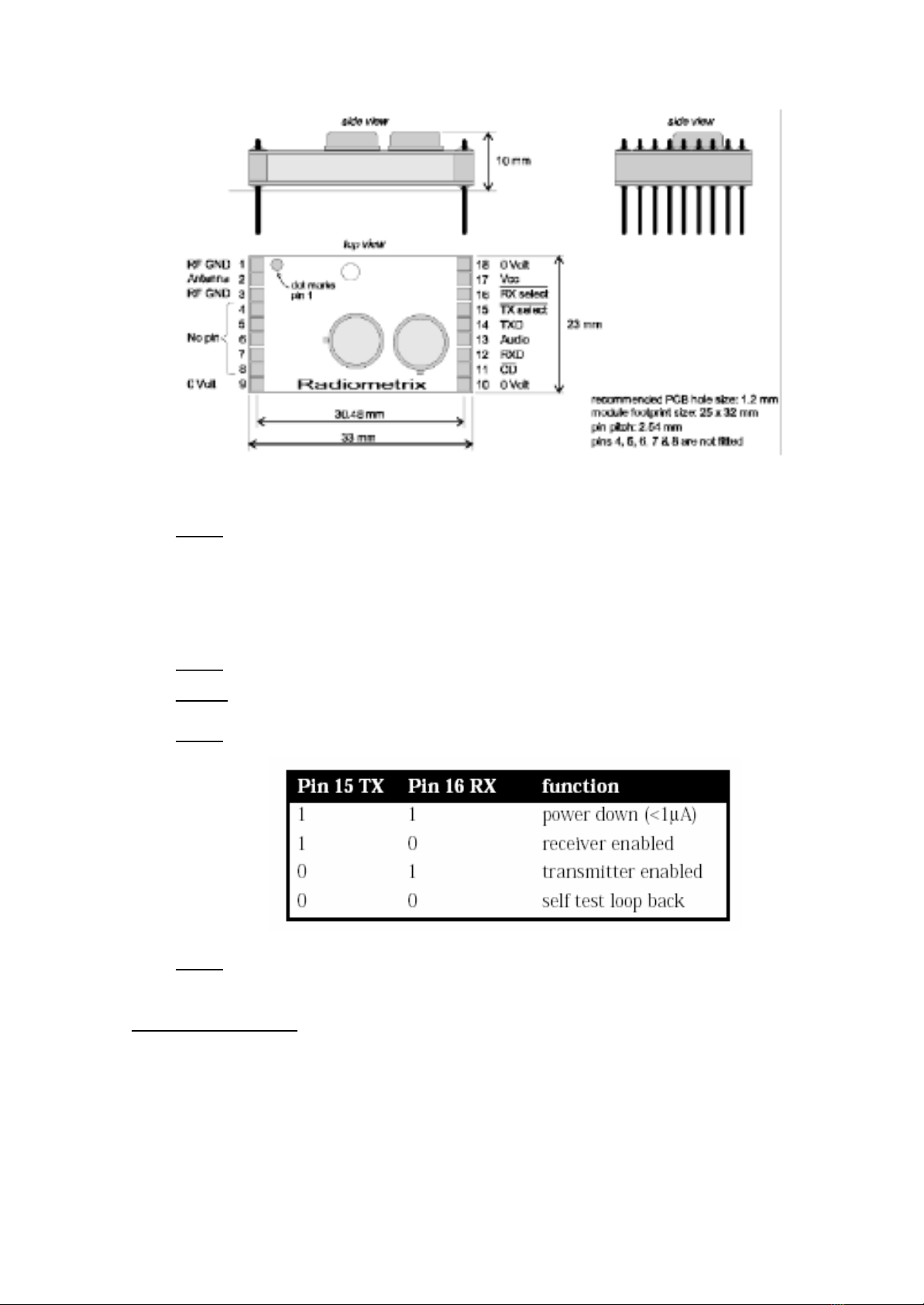
2.3.2 Mô t các chân :ả
Hình 2.1: Mô t các chân c a Radiometrix.ả ủ
Pin13:Đây là ngõ ra c a đi u ch FM. Nó có DC bias hi n hành kho ngủ ề ế ệ ả x p xấ ỉ
1.5V và có th đ c s d ng đ lái nh ng b gi i mã d li u t ng t nh là nh ng bể ượ ử ụ ể ữ ộ ả ữ ệ ươ ự ư ữ ộ
gi i mã modem. Tr kháng ngõ ra là 10kOhm. Ngõ ra ch là d li u th c cho BiM-418 vàả ở ỉ ữ ệ ự
đ o ng c l i v i BiM-433.ả ượ ạ ớ
Pin14 (TXD): Ngõ vào này luôn <0.5V khi TX không đ c ch n.ượ ọ
Pin 15 (TX select):S l a ch n truy n/nh n v i đi n tr trong 10kOhm.ự ự ọ ề ậ ớ ệ ở
Pin16 (RX select): Có th đ c lái b ng c c thu h ho c là CMOS logic.ể ượ ằ ự ở ặ
Pin17: VCC: có th s d ng các ngu n áp t 4.5-5.5 V. Đ g n sóng t i đa làể ử ụ ồ ừ ộ ợ ố
50mV đ nh-đ nh.ỉ ỉ
2.4 Charisma board:
2.4.1 S đ b trí:ơồố
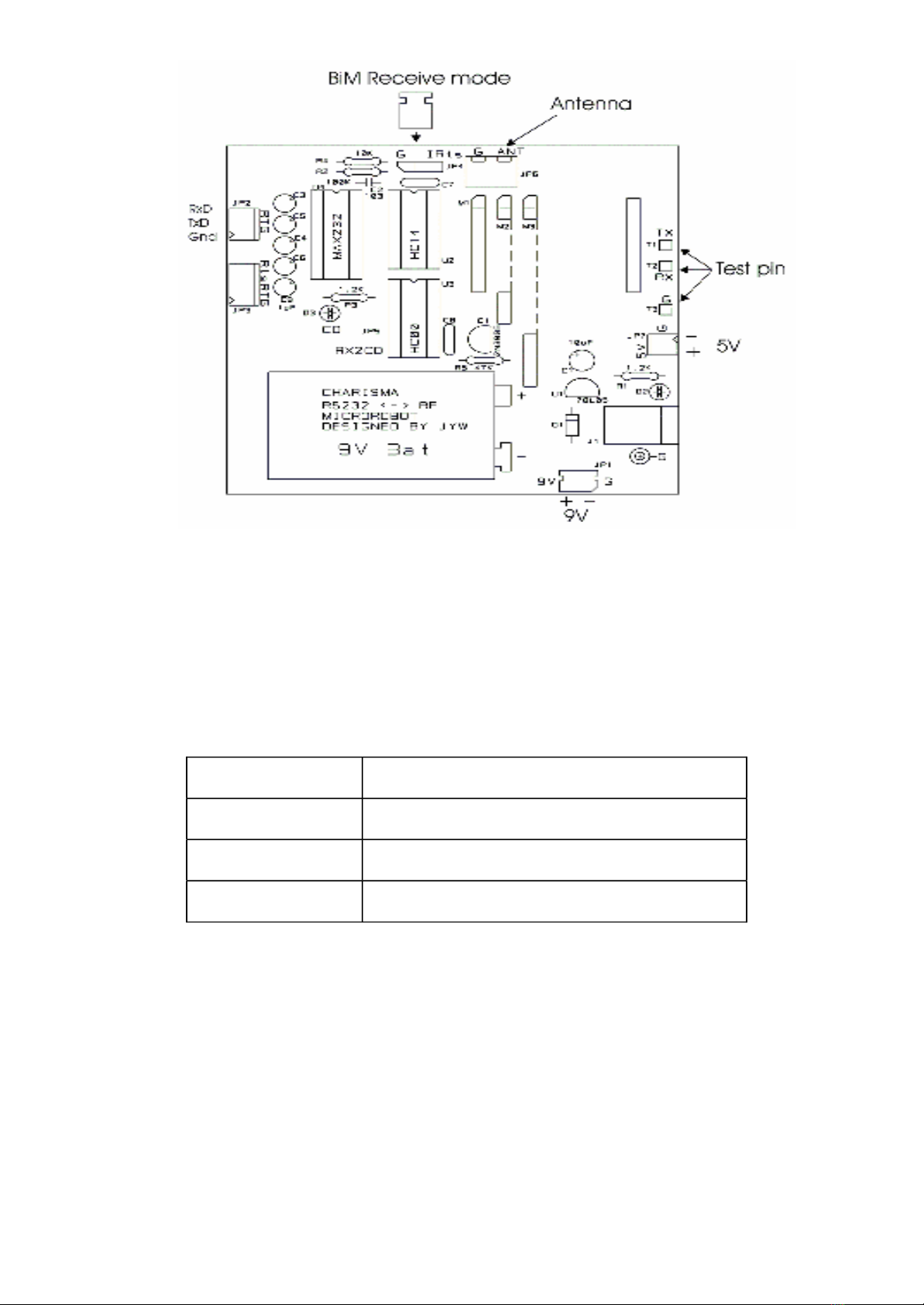
Hình 2.2: S đ b trí c a m ch giao ti p RF.ơ ồ ố ủ ạ ế
2.4.2 Cài đ t module:ặ
Module RF là các module giao ti p 2 chi u.Đ ch n ch đ truy n và nh n có thế ề ể ọ ế ộ ề ậ ể
s d ng ph ng pháp ph n m m và ph n c ng.Ph ng pháp ph n m m s d ng chânử ụ ươ ầ ề ầ ứ ươ ầ ề ử ụ
RTS c a c ng RS232.Ph ng pháp ph n c ng s d ng kh i jumper nh sau:ủ ổ ươ ầ ứ ử ụ ố ư
Cài đ t jumper Ch đặ ế ộ
1,2 Nh nậ
2,3 Ph ng pháp ph n m m (truy n và nh n)ươ ầ ề ề ậ
Empty Truy n, phátề









![Robot song song P2: [Thêm từ mô tả hấp dẫn, ví dụ: Hướng dẫn chi tiết, Cách chế tạo hiệu quả]](https://cdn.tailieu.vn/images/document/thumbnail/2010/20100323/tanlang/135x160/robot_song_song_2_9234.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)