
Dùng Sensor hồng ngoại (IR) để dò vạch
trắng
Người viết: Administrator
01/05/2007
2.1 các đặc tính của IR sensor
2.2 IR Sensor điều biến
2.1 Các đặc tính của IR sensor
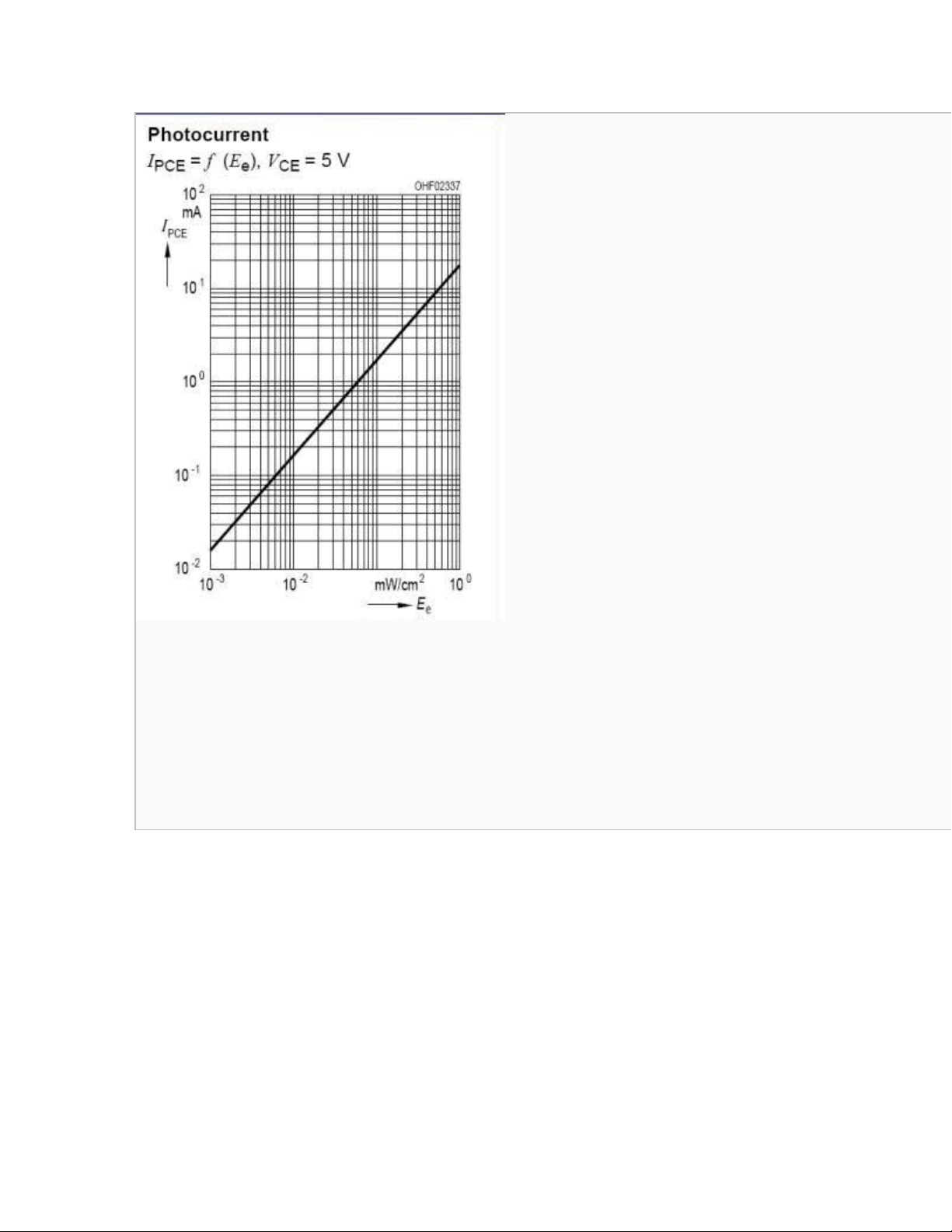
Trong con robot mẫu tự động này, chúng tôi sử dụng 2 linh kiện hồng ngoại (IR): một linh kiện phát hồng ngoại (IR emitter) và một linh kiện nhận
(IR receiver) tạo thành 1 cặp cảm biến sensor. Linh kiện phát sẽ tạo tia hồng ngoại và sau khi phản xạ sẽ truyền tới linh kiện nhận.
Dòng điện đi qua linh kiện nhận sẽ tỉ lệ với cường độ năng lượng của tia hồng ngoại mà nó nhận được.
Trong robot mẫu của chúng tôi, linh kiện phát và nhận được nối mạch theo sơ đồ hình dưới đây. Khi TX ở trạng thái thấp, dòng sẽ đi qua linh kiện
phát và nó sẽ phát ra tia hồng ngoại. Nếu có 1 vật phản xạ mầu trắng thì năng lượng hồng ngoại sẽ phản hồi lại và tạo một dòng cao hơn đi qua
linh kiện nhận, do đó điện áp trên IRS0 sẽ hạ xuống. Nếu vật phản xạ có mầu đen, hoặc mầu sẫm hơn thì điện áp trên IRS0 sẽ nâng lên.
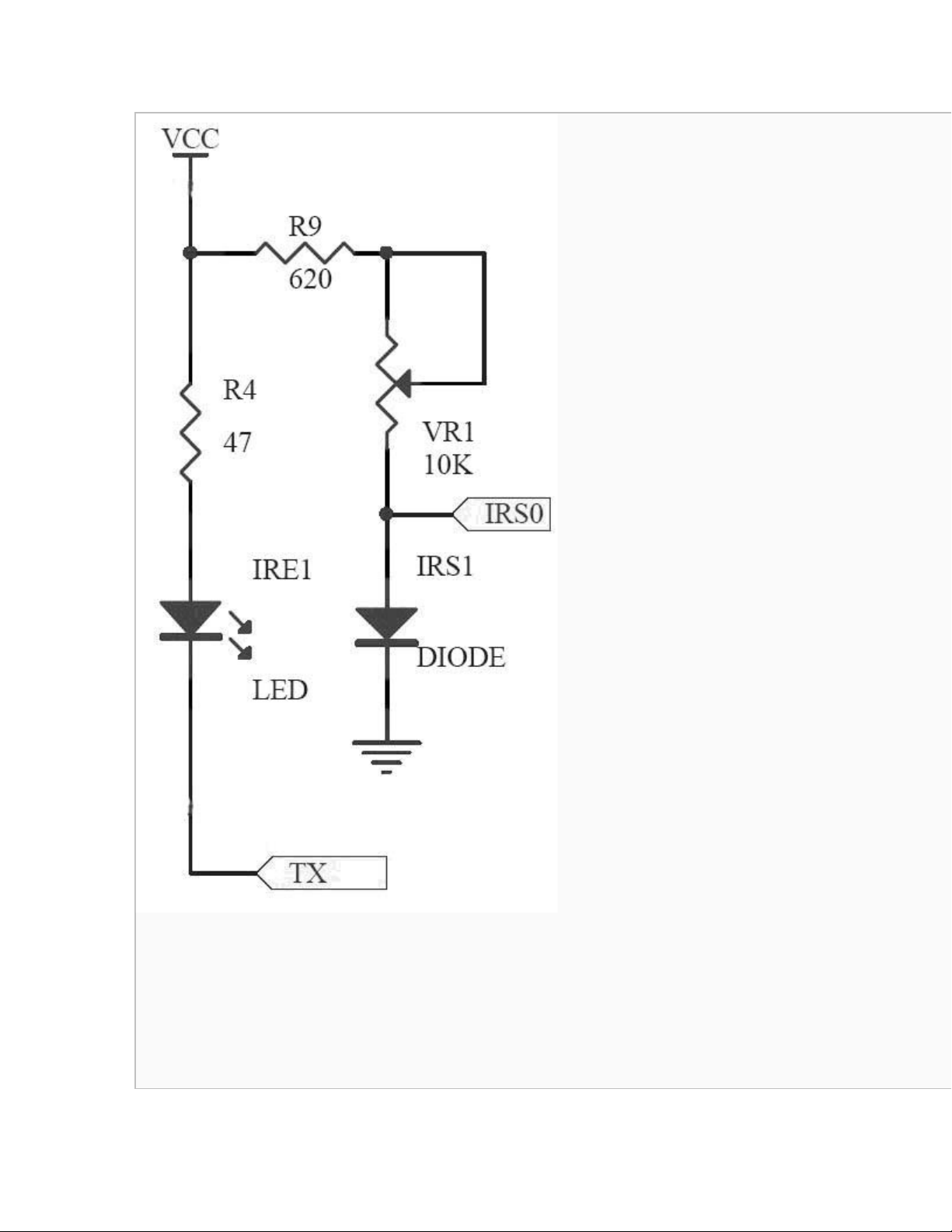
Đọc giá trị điện áp này chúng ta có thể phân biệt được vạch dẫn đường màu trắng trên nền nhà màu xanh.
2.2 IR Sensor điều biến
Độ chính xác của sensor hồng ngoại được miêu tả trên phần trước bị ảnh hưởng rất nhiều bởi ánh sáng môi trường. Mức điện áp trên đầu ra của
sensor IR không chỉ phụ thuộc vào cường độ ánh sáng phản xạ mà còn bị thay đổi bởi điều kiện ánh sáng môi trường.
Để giảm bớt sự ảnh hưởng của ánh sáng môi trường, chúng tôi dùng 1 sensor hồng ngoại điều biến thay vì sensor IR thông thường.
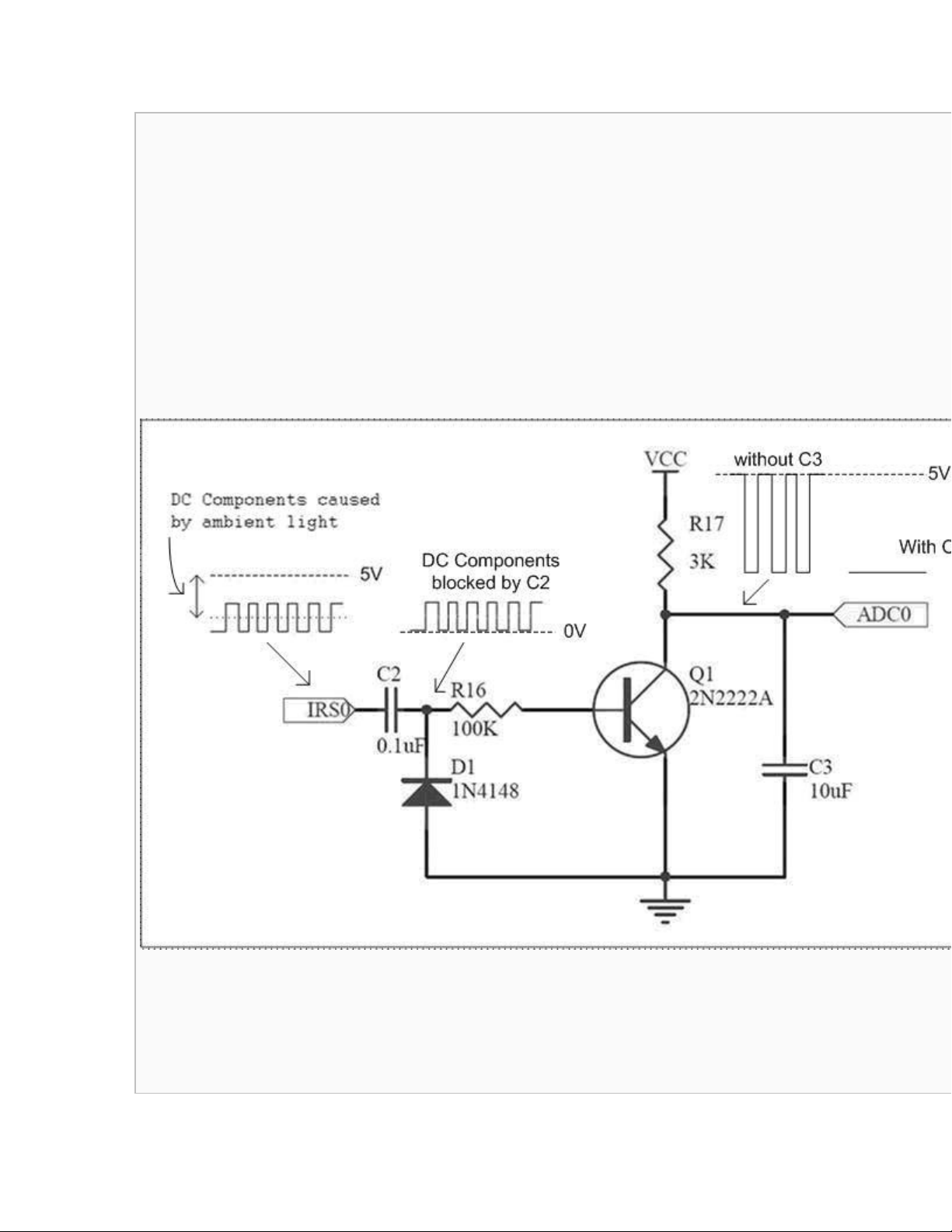
Trong hệ thống sensor IR điều biến của chúng tôi, linh kiện phát được bật và tắt bởi 1 đồng hồ. Tín hiệu nhận được sau đó đi qua 1 mạch khuếch
đại 1 chiều DC như trên hình vẽ dưới đây. Tụ C2 trong mạch sẽ chặn dòng DC ra khỏi tín hiệu đi qua bộ khuếch đại này. Chỉ có phần xoay chiều
của tín hiệu thay đổi tương ứng với tia hồng ngoại phản xạ phát ra từ bộ phát là được khuếch đại và tích hợp vào mức 1 chiều ở đầu ra của mạch.
Như vậy mức ra của mạch chỉ phụ thuộc vào tia hồng ngoại mà không phụ thuộc vào ánh sáng môi trường. [1]
Tham khảo:
[1] bottom.pdf (trong tài liệu hướng dẫn làm robot mẫu)









![Robot song song P2: [Thêm từ mô tả hấp dẫn, ví dụ: Hướng dẫn chi tiết, Cách chế tạo hiệu quả]](https://cdn.tailieu.vn/images/document/thumbnail/2010/20100323/tanlang/135x160/robot_song_song_2_9234.jpg)
















%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)