1
MỘT SỐ KẾT QUẢ NGHIÊN CỨU
THIẾT KẾ CHẾ TẠO VÀ ỨNG DỤNG
ROBOCAR
Nguyễn Thiện Phúc, Trần Minh Nghĩa, Lê Hoàng Giang
Trung tâm NCKT Tự động hoá, ĐHBK - HN
Tóm tắt
Trong bài này giới thiệu một số kết quả nghiên
cứu thiết kế chế tạo và ứng dụng Robocar của Trung tâm
NCKT tự động hoá, ĐHBK - HN. Trình bày các phương
pháp tính toán động học và xây dựng các thuật toán điều
khiển chuyển động của Robocar khi yêu cầu bám theo
đường dẫn và tránh được chướng ngại v.v. Đồng thời
giới thiệu một số ứng dụng thực tế.
1. GIỚI THIỆU CHUNG
Robocar là loại robot di động trên xe (a car-like
mobile robot). Hệ thống thiết bị chấp hành gồm 2 phần:
tay máy và xe, nhưng có chung hệ thống điều khiển.
Robocar chủ yếu hoạt động trong các phân xưởng, bến
bãi, với địa hình không quá phức tạp nên kết cấu xe
cũng rất đơn giản.
2. TÍNH TOÁN ĐỘNG HỌC
Trước hết đối với tay máy của robocar thì về
nguyên tắc có thể dùng nhiều loại cơ cấu khác nhau. Ở
đây chọn loại cơ cấu Robot RP thuộc nhóm robot phỏng
sinh trục ngang (bắt chước cơ cấu tay người). Sự khác
biệt của robot này so với các kiểu robot phỏng sinh khác
là ở đây dùng cơ cấu Pantograph với 2 con trượt dẫn
động làm môđun chủ yếu của cơ cấu tay máy. Cũng vì
thế robot này được ký hiệu vắn tắt là robot RP.
Với những quan hệ thông số hợp lý, loại cơ cấu
tay máy này có các ưu điểm sau: 1) Có thể bố trí nguồn
động lực gần với thân nhưng vẫn đảm bảo chuyển động
độc lập của các khâu chấp hành; 2) Đảm bảo đơn giản
về kết cấu, linh hoạt về cấu trúc và nhỏ gọn về kích
thước; 3) Dễ dàng giữ cân bằng ở các vị trí khác nhau
và tiêu hao ít năng lượng; 4) Dễ điều khiển do có thể
thực hiện các chuyển dịch của bàn kẹp theo các trục toạ
độ bằng cách di chuyển con trượt riêng rẽ và các bài
toán trong mọi cấu hình đều có thể đưa về bài toán
phẳng.
Đối với cơ cấu xe di chuyển đã tiến hành tính
toán với các phương án khác nhau: 3 bánh xe hoặc 4
bánh xe, 1 bánh chủ động hoặc 2 bánh chủ động, bánh
trước chủ động hoặc bánh sau chủ động, bánh lái đặt
trước hoặc đặt sau v.v.
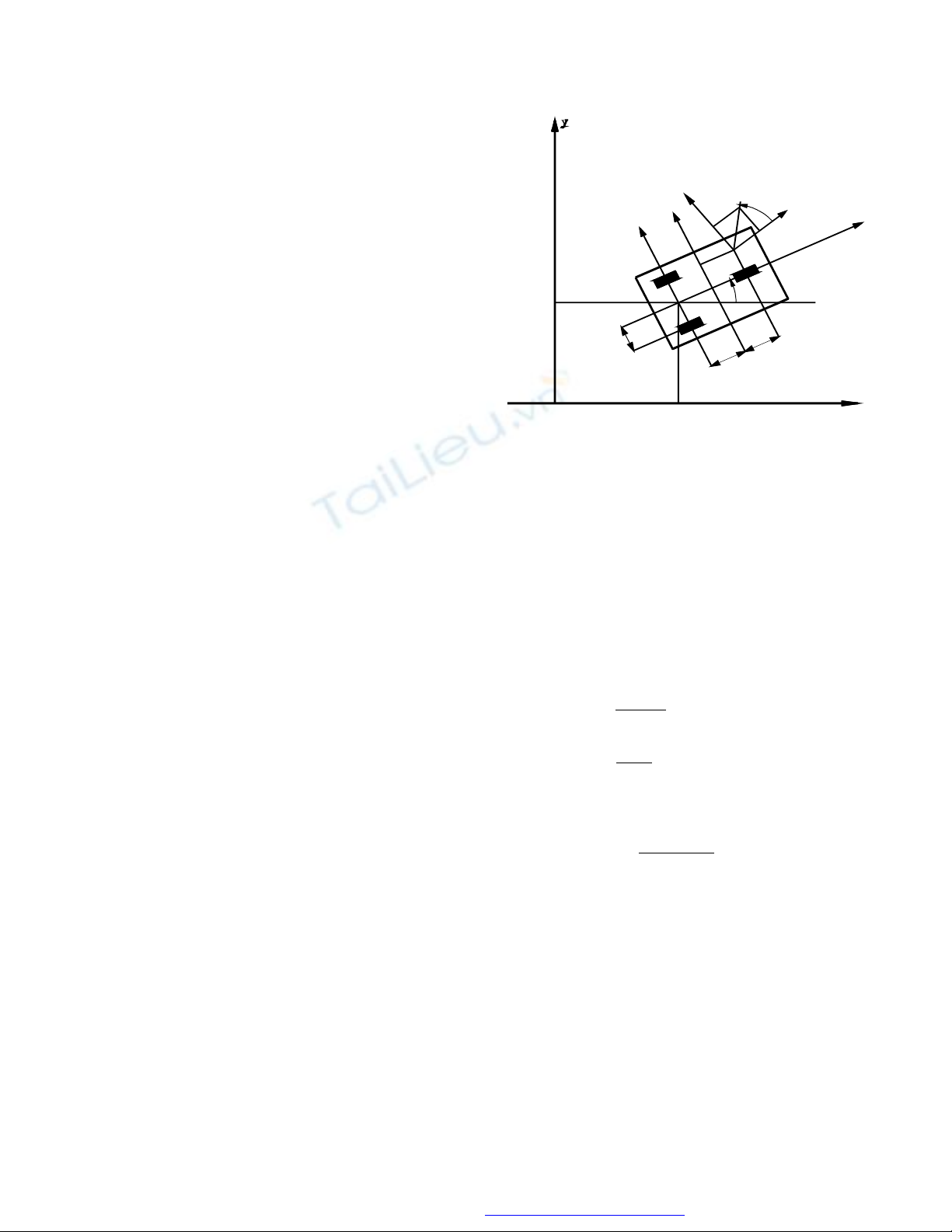
Hình 1
Trên hình 1 là trường hợp 3 bánh, 2 bánh
sau chủ động và là các bánh lái. Cho hệ toạ độ xd yd
zd gắn liền với xe di động, có gốc tại điểm D trung
tâm xe. Ở vị trí xuất phát điểm D trùng với điểm C
(px yy 0) trong không gian cố định x, y, z. Điểm C
nằm trên trục bánh xe sau và cách đều chúng một
khoảng b, còn D nằm giữa 2 trục bánh xe trước và
sau với khoảng cách 2a.
Gọi V là vận tốc di chuyển và ω là vận tốc
góc của xe, tương ứng với góc lái α. Theo các quan
hệ vận tốc, dễ dàng có các biểu thức sau:
V =
2
tp VV
+
, (1)
a
Vtg
2
α
ω=, (2)
pp RV ω=
V
t
= Vp ,
.2
2
α
α
tgba
btga
+
−
(3)
).(),(2[2 tptp VVbVVaarctg
+
−
=
α
(4)
Với R và ωp - bán kính và vận tốc góc của
bánh phải,
V
p
và Vt - vận tốc trên bánh phải và bánh
trái.
Khi cần xét chuyển động của điểm T trên
xe, gắn liền với dụng cụ thao tác (ví dụ, đầu dò, đầu
cắt, đầu hàn v.v.) ta gắn hệ toạ độ xt, yt, zt tại điểm Ot
của xe có toạ độ (m, n, h) trong hệ toạ độ xd yd zd.
x
C
D
b
a
a
ϕ
ϕ
t
x
y
y
x
O
t
t
y
d
c
O
t
T
m
n
P
P
y
xc, xd
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
2
Điểm T cách 0t đoạn L được mô tả trong hệ xt yt zt bằng
các biểu thức sau:
T
ttttt LLr )0,sin,cos( ϕϕ= (5)
Trong hệ toạ độ cố định x, y, z điểm T được
xác định bởi:
tot rMr .= (6)
Thiết lập ma trận chuyển hệ toạ độ Mot theo
phương pháp dùng ma trận đồng nhất [1]:
M
ot = Moc .Mcd.Mdt (7)
Trong đó:
M
0c =
−
1000
0100
0cossin
0sincos
y
x
p
p
ϕϕ
ϕϕ
, (8)
M
cd =
1000
0100
0010
001 a
, (9)
M
dt =
−
1000
100
0cossin
0sincos
h
n
m
θθ
θθ
(10)
Bài toán sẽ tổng quát hơn nếu hệ thống tay
máy của robocar được đặt tại điểm Ot nói trên và kết nối
hệ toạ độ xt, yt, zt với hệ toạ độ động đầu tiên của cơ cấu
tay máy thì ta hoàn toàn có thể xác định về định vị và
định hướng của điểm tác động cuối E (End - effector)
của robocar trong không gian làm việc.
Bài toán động học ngược của robocar có thể
đặt ra như sau: Cho điểm T gắn với dụng cụ thao tác di
chuyển theo một quỹ đạo với vận tốc V không đổi, cần
xác định các giá trị tức thời của ωp và α để điều khiển
cho điểm T của xe bám theo quỹ đạo đó. Hoặc tổng quát
hơn, bài toán động học ngược của robocar được mô tả
như sau: Để đảm bảo cho điểm tác động cuối E của
robocar bám theo một quỹ đạo cho trước trong không
gian làm việc, cần xác định bộ thông số theo thời gian
của vận tốc góc bánh xe chủ động ωp, góc lái α và các
biến khớp qi của cơ cấu tay máy.
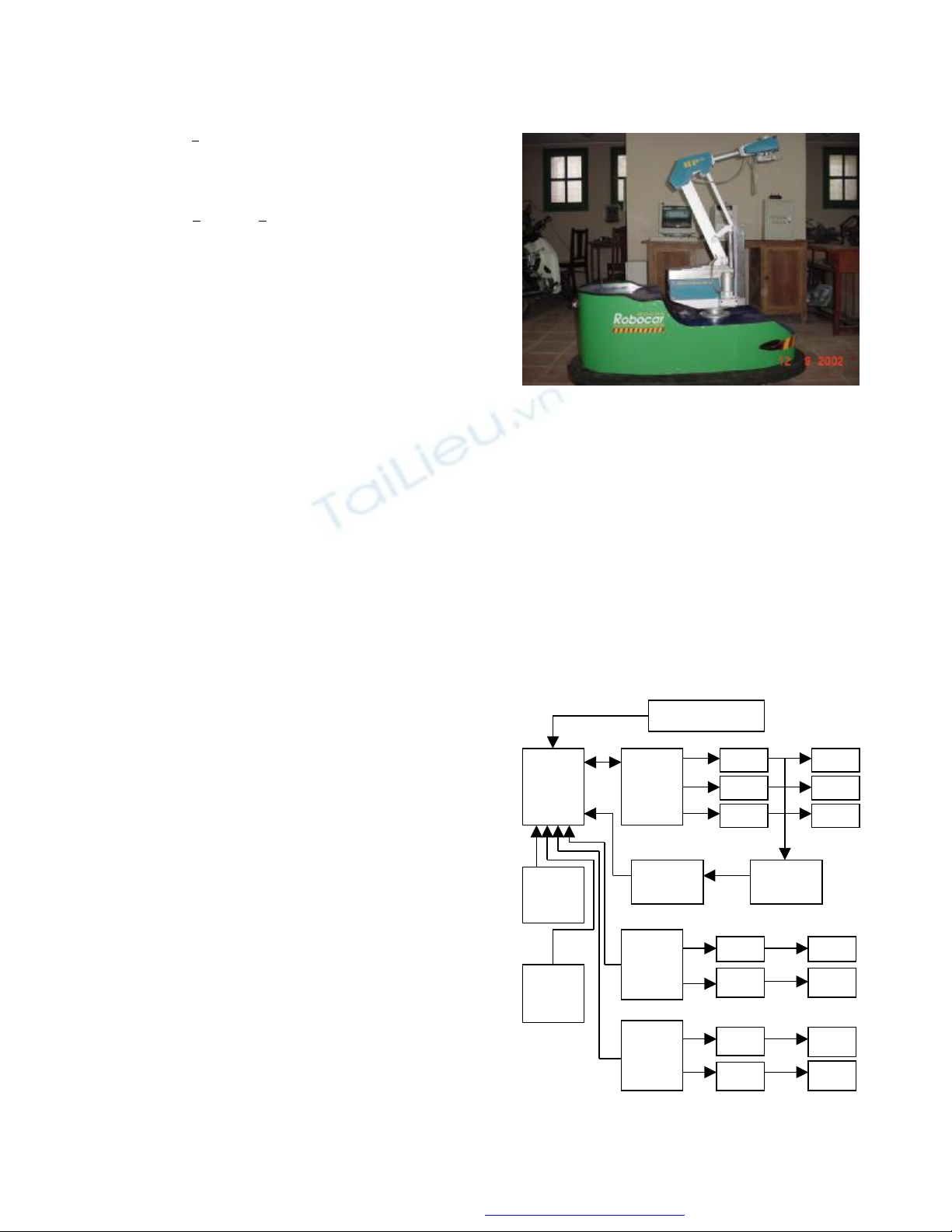
3. ROBOCAR RP
Robocar RP (hình 2) là sản phẩm của Trung
tâm NCKT Tự động hoá, ĐHBK - HN thiết kế, chế tạo
nhằm phục vụ cho các công việc như công gắp, sắp xếp,
vận chuyển phối liệu hoặc sản phẩm trong phân
xưởng của các xí nghiệp công nghiệp.
Hình 2
Phần trên của Robocar RP là một tay máy 4
bậc tự do, thực hiện bởi 3 động cơ một chiều điện áp
24V và một động cơ bước, ngoài ra còn một động cơ
bước cho bàn kẹp.
Phần dưới của Robocar RP là một xe 3
bánh. Bánh trước đóng vai trò vừa là bánh lái vừa là
bánh truyền động, đều dùng động cơ 1 chiều.
Robocar RP làm việc theo chế độ tự hành
nên được trang bị một hệ thống quan sát có thể nhận
biết môi trường xung quanh. Hệ thống quan sát là các
sensor quang học gắn trên khung xe nhằm phát hiện
các chướng ngại trên đường đi. Khi phát hiện chướng
ngại, Robocar dừng lại và báo hiệu.
Hình 3
S7-200
PLC
M
ạch role
đi
ều khiển
DC
DC1
DC2
DC3
Tải 1
Tải
2
Tải
3
Các bộ
đếm xung
Các bộ m
ã
vị trí
Nguồn
cung c
ấp
12 V
Driver
cho đ
ộng
cơ bước
Step2
Step 1
Tải 4
Tải 5
M
ạch role
đi
ều khiển
DC
DC4
DC5
Tải 6
Tải 7
Các cảm
biến vị trí
Bộ thu tín hiệu từ xa
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com
3
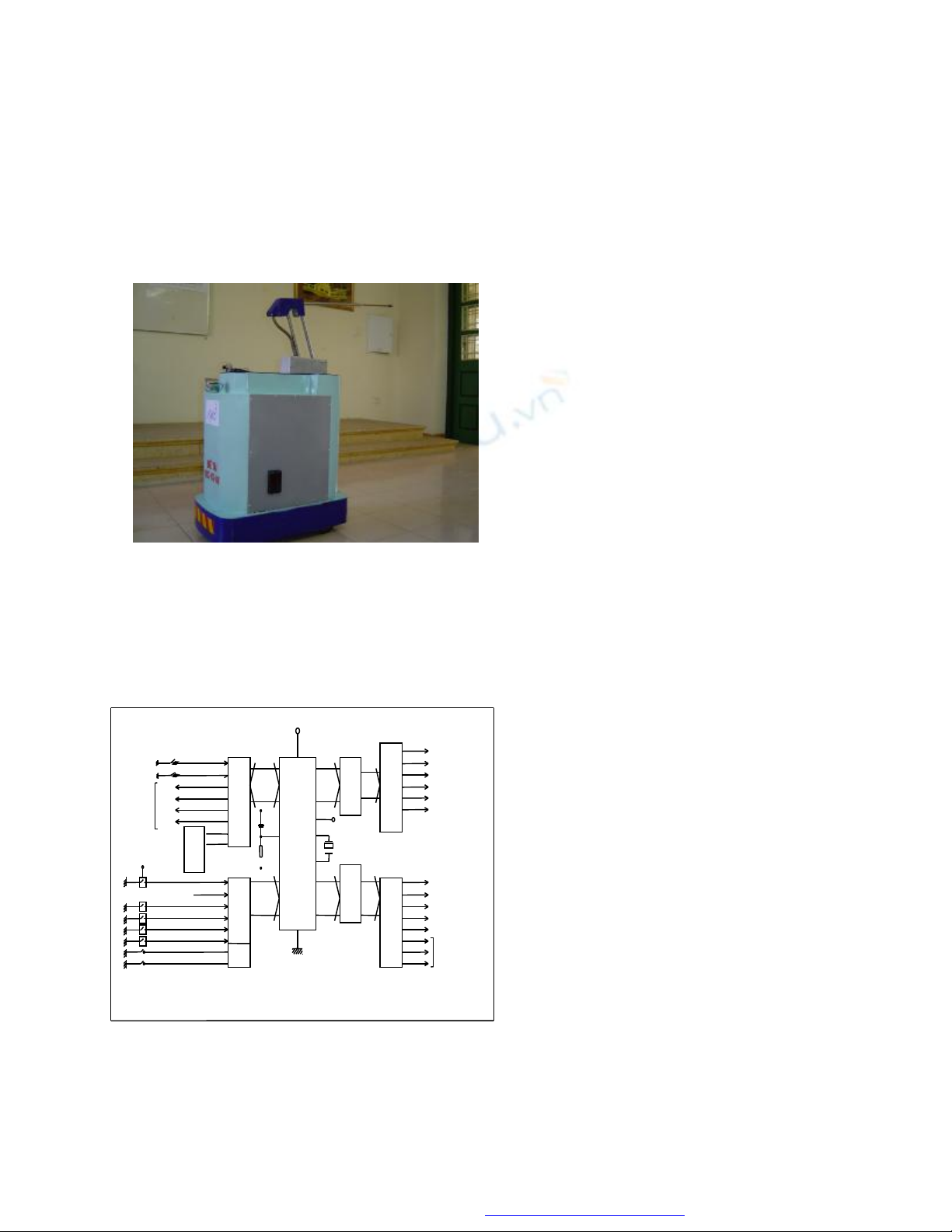
4. ROBOCAR “CHỮ THÂP ĐỎ”
Robocar “chữ thập đỏ” (hình 4) là một robot tự
hành phục vụ trong công tác y tế nhằm giúp đỡ các công
việc cho các y tá, hộ lý trong các bệnh viện. Đặc biệt
trong các công việc phòng chống dịch bệnh. Robocar
“chữ thập đỏ” được thiết kế một cách gọn gàng và linh
hoạt. Nó gồm một xe 3 bánh và một robot 2 bậc tự do
cũng là loại robot RP đơn giản. Đầu cánh tay robot có
gắn một vòi phun hoá chất phục vụ công tác phòng dịch.
Hình 4
Hệ điều khiển của Robocar “chữ thập đỏ” sử
dụng on_chíp 89 C52 với chương trình được nạp trong
bộ nhớ nội và mạch ngoại vi theo sơ đồ hình 5.
Hình 5
Khi bật điện cho Robocar chương trình
được khởi động từ đầu. Nó thực hiện khởi tạo cho bộ
xi xử lý 89C52 đưa bánh lái về vị trí đầu với góc lái
bằng 00 thẳng
với hướng tiến của xe, vòi phun được đưa về vị trí
ban đầu.
Khi ấn nút START động cơ chuyển động và
động cơ lái được nối điện xe tiến về phía trước, các
cảm biến xa, gần được nối điện và dùng để điều
khiển động cơ lái xe. Động cơ bơm nước được khởi
động để tạo áp suất cho vòi phun nước.
Các cảm biến đo khoảng cách được bố trí
theo sườn trái của xe để đo khoảng cách tới vách tựa.
Các cảm biến được điều chỉnh như sau: Cảm biến đo
cự ly gần được điều chỉnh thay đổi trạng thái khi
cách vách tựa 500mm, cảm biến đo cự ly xa được
điều chỉnh thay đổi trạng thái khi cách vách tựa
700mm. Nếu xe chuyển động cách vách tựa trong
khoảng 500 ÷ 700mm thì bánh lái được giữ ở vị trí
thẳng (góc lái bằng 0). Nếu xe chuyển động cách
vách dưới 500mm thì bánh lái được điều khiển quay
về phải trong thời gian T là chu trình lái được xác
định bằng thực nghiệm, sau đó lại trả về vị trí thẳng
để đưa xe về với khoảng cách 500 ÷ 700mm so với
vách. Nếu xe chuyển động cách vách tựa hơn 700mm
thì bánh lái được điều khiển quay về trái để đưa xe về
gần vách tựa, trong thời gian T và lại được trả về vị
trí thẳng để đưa xe trở về trong hành lang 500 ÷
700mm. Cứ như vậy xe được điều khiển chuyển
động cách vách tựa một khoảng định sẵn, khoảng
cách này có thể đặt trước theo ý muốn.
Khi xe gặp chướng ngại vật ở phía trước,
cảm biến báo vật cản được kích hoạt để điều khiển xe
dừng lại và đổi hướng đi hoặc lúc đó sẽ điều khiển
bơm hoá chất hoạt động để phòng dịch tuỳ chuyển
mạch chọn chế độ làm việc được chọn trước.
Các hoạt động của xe được điều khiển bởi
chương trình chứa trong EEPROM của bộ vi điều
khiển 89C52 có thể bổ sung, sửa đổi và thay thế dễ
dàng, các ứng dụng của xe vì thế có thể thay đổi một
cách dễ dàng theo những ứng dụng mở cho phép tuỳ
theo những nhiệm vụ mà người sử dụng có thể lựa
chọn.
Chương trình được viết bằng hợp ngữ của
họ vi xử lý 8051 và được kiểm tra chạy thử trên
Emulator cho họ 8051. Chương trình được dịch bởi
bộ dịch chéo cho họ vi xử lý 8051 và được nạp bằng
bộ nạp chuyên dụng.
5. KẾT LUẬN
Trên đây đã trình bày phương pháp tính toán
động học và xây dựng các thuật toán điều khiển
chuyển động của robocar trong hợp chung nhất,
không xem xét tách biệt phần xe riêng, phần robot
1
8
32
29
89C52
9
Bộ ĐKTT
17
10
Đ
ệm
vào
ra
A1013
24C
02
P1
P0
P2
P3
P1.0
P1.1
P1.2
P1.3
P1.4
P1.5
P1.6
P1.7
Bộ nhớ
Vị trí cuối dưới
Vị trí cuối ngoài
Dự
trũ
Ra
1
Ra
2
Ra 4
Ra 3
P3.7
P3.6
P3.5
P3.4
P3.3
P3.2
P3.1
P3.
0
CB gãc l¸i
sau
CB vËt c¶n
CB gãc l¸i tr<íc
CB xa
CB gÇn
Chän chÕ ®é
20
P0.5
P0.4
P0.3
P0.2
P0.1
P0.0
§éng c¬ lïi
§éng c¬ tiÕn
§éng c¬ l¸i tr¸i
§éng c¬ l¸i ph¶i
§éng c¬ cßi
§éng c¬ b¬m
§éng c¬ x¶
n<íc
§éng c¬ vµo
§éng c¬ ra
§éng c¬ xuèng
§éng c¬ lªn
P2.0
P2.1
P2.2
P2.3
P2.4
P2.5
P2.7
P2.6
Dù tr÷
19
18
XTAL
12M
hz
31
5
v
40
5
v
Vcc
START
5
v
Reset
Đ
ệm
vào
v à
ra
Ra
Đ
ệm
ra
ULN
2803
Đ
ệm
ra
ULN
2803
28
21
KD
Công
suất
2383
KD
công
suất
2383
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com

4
riêng và số bậc tự do của robot không hạn chế. Bộ phận
sensor được trang bị như những môđun độc lập nhưng
cùng trong một hệ thống điều khiển và ngày càng phong
phú dần. Các kết quả nghiên cứu ngày càng mở rộng
phạm vi ứng dụng, rất có hiệu quả.
TÀI LIỆU THAM KHẢO
1. Nguyễn Thiện Phúc - Robot công nghiệp - NXB khoa
học và kỹ thuật, Hà Nội, 2002.
SOME RESULTS OF DESIGNING,
MANUFACTURING
AND APPLICATION OF THE ROBOCAR
Nguyen Thien Phuc, Tran Minh Nghia, Le Hoang Giang
Research Centre of Automation, Hanoi University of
Technology
In this paper are introduced some results of
studying and applying of the Robocar produced at the
RCA of Hanoi University of Technology. The paper
presents a method of kinematic calculation and
establishment of algorithm calculation for motion
control along a described trajectory and for a way
avoided obstacles v.v...In this paper are also introduced
some application of robocar
PDF created with FinePrint pdfFactory Pro trial version http://www.fineprint.com




![Chương trình Test Aero-Acoustic: Tổng hợp [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2012/20120202/luly_meo1/135x160/aero_acoustic_test_programs_split_6_4917.jpg)










![Cẩm nang Gia công kim loại Việt Nam [mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2026/20260513/baobinh_011/135x160/7971778670576.jpg)


![Giáo trình Hàn ống nâng cao (Nghề Hàn - CĐ) Trường Cao đẳng nghề Hải Dương [Mới nhất]](https://cdn.tailieu.vn/images/document/thumbnail/2025/20251212/laphong0906/135x160/47521779076565.jpg)







%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)