1
1
Electrical Engineering
KHOA ĐIỆN
BỘMÔN TỰ ĐỘNG HÓA
THIẾT KẾHỆTHỐNG VI XỬLÝ
Dr. Nguyễn Hồng Quang
Electrical Engineering 2
Đề cương môn học
•Địa chỉliên hệ
•Nội dung môn học
•Tài liệu tham khảo
•Bài tập dài và đề thi
•Những yêu cầu từsinh viên
2
Electrical Engineering 3
Địa chỉ
•Khoa Tự động hoá, C9-106, Tel 8692306
•Thầy giáo
– Nguyễn Hồng Quang,
quangnh@mail.hut.edu.vn
– Võ Công Thành, thanhvd-
auto@mail.hut.edu.vn
Electrical Engineering 4
Mục đích môn học
• Trang bịkiến thức cơ sởvề:
–Kỹthuật số
– Nguyễn lý làm việc hệthống vi xửlý
– Nghiên cứu tính năng vi điều khiển 8051
• Trang bi kỹ năng làm việc với hệVi xửlý
–Phương pháp thiết kếphần cứng
–Phương pháp thiết kếphần mềm
3
Electrical Engineering 5
Kết quảmôn học
• Phân biệt được các phần tử cơ bản dùng
trong hệthống điều khiển số
•Xây dựng mô hình điều khiển sốsửdụng hệ
thống Vi xửlýkhác nhau
Electrical Engineering 6
Tài liệu tham khảo
•Điều khiển logic, Nguyễn Trọng Thuần
•Họ Vi điều khiển 8051, Tống Văn On
•Đo lường và điều khiển bằng máy tính, Ngô
Diên Tập
•Kỹthuật vi xử lý, Văn ThểMinh
• Internet – code project
4
Electrical Engineering 7
Yêu cầu
•Bài giảng
–Đến nghe đủ các buổi giảng
–Cốgắng hỏi các câu hỏi trong thời gian cho
phép
• Thí nghiệm
–Làm đầy đủ các thí nghiệm, có viết báo cáo
Electrical Engineering 8
Thời gian biểu
TuÇn 1 Giíi thiÖu hÖ thèng sè
TuÇn 2 Các mạch số cơ bản, flip-flop, mạch nhớ
TuÇn 3 Giới thiệu hệVi xử lý, vi điều khiển, cầu trúc phần cứng
TuÇn 4 Cấu trúc phần cứng và nguyên lý hoạt động của vi điều khiển 8051
TuÇn 5 GiớI thiệu vềphần mềm Assembler 8051, chưong trình dịch, phần 1
TuÇn 6 GiớI thiệu vềphần mềm Assembler 8051, chưong trình dịch, phần 2
TuÇn 7 Bộdịnh thời và nguyên lý hoạt động
TuÇn 8 Ngắt và cách xửlý tín hiệu ngắt
TuÇn 9 HÖ thèng truyÒn tin, A/D, D/A,
TuÇn 10 Thí nghiệm ghép nối thiết bịngoại vi, phương pháp xửlý
TuÇn 11 Thí nghiệm điểu khiển động cơ bước, động cơ một chiều
TuÇn 12 GiảI đáp thắc mắc, đề thi
5
Electrical Engineering 9
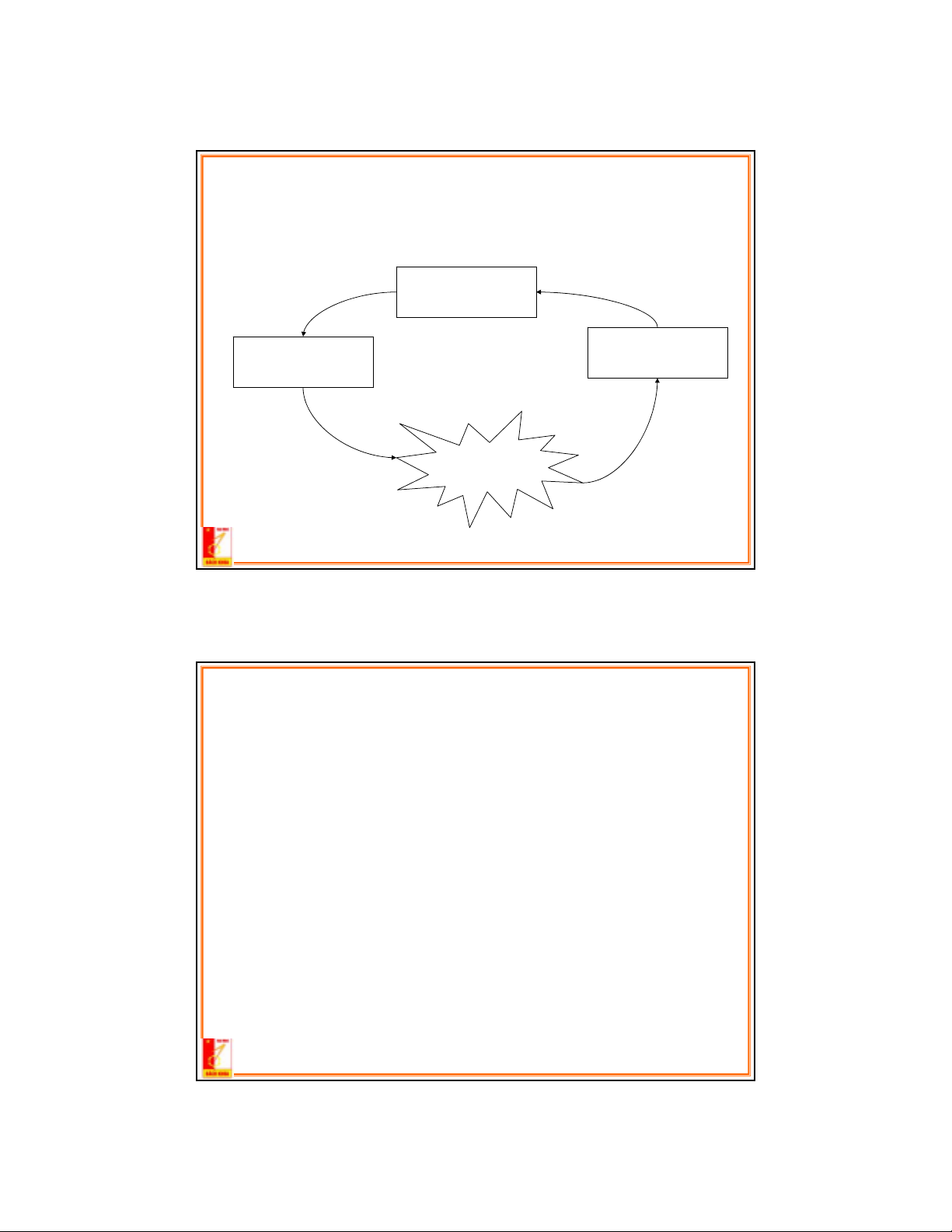
Nguyên lý chung hệthống cơ điện tử
C¬ cÊu chÊp
hµnh
C¶m biÕn
(sensor)
HÖ thèng ra
quyÕt ®Þnh
§èi t−îng thùc
Electrical Engineering 10
Định nghĩa
•Hệthống điều khiển thời gian thực (real
time system) là hệthống phải đáp ứng yêu
cầu điều khiển trong khoảng thời gian xác
định.
• Sai sót trong việc đáp ứng thời gian này sẽ
dẫn tới hậu quảkhác nhau hoặc làm hư
hỏng toàn bộhệthống


























%20--%3e%3cdefs%3e%3cstyle%3e%20.st0%20{%20fill:%20%23fff;%20}%20.st1%20{%20fill:%20%237800fa;%20}%20%3c/style%3e%3c/defs%3e%3cpath%20class='st1'%20d='M117.78,12.18H43.11c2.9,3.47,4.65,7.94,4.65,12.82,0,5.6-2.3,10.66-6.01,14.29h76.02l7.22-13.56-7.22-13.56Z'/%3e%3cg%3e%3cpath%20class='st0'%20d='M53.58,26.17h-.59v-1.46h.59v-4.96h2.83c1.78,0,2.67.94,2.67,2.82v5.76c0,1.87-.89,2.81-2.67,2.81h-2.83v-4.96ZM55.36,21.37v3.34h1.1v1.46h-1.1v3.34h1.01c.61,0,.91-.37.91-1.1v-5.93c0-.74-.3-1.1-.91-1.1h-1.01Z'/%3e%3cpath%20class='st0'%20d='M65.99,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM65.28,18.04c-.25.46-.51.77-.75.94-.21.15-.47.22-.79.22-.26,0-.57-.07-.92-.22l-.38-.15c-.14-.05-.26-.07-.37-.07-.3,0-.53.18-.71.54l-.91-.68c.25-.46.51-.77.75-.94.21-.14.48-.21.79-.21.26,0,.57.07.92.21l.38.15c.14.05.26.07.37.07.3,0,.53-.18.71-.54l.91.68ZM61.91,27.52h1.73l-.87-5.76-.87,5.76Z'/%3e%3cpath%20class='st0'%20d='M74.53,26.89v1.52c0,1.91-.89,2.86-2.67,2.86s-2.67-.95-2.67-2.86v-5.93c0-1.91.89-2.86,2.67-2.86s2.67.95,2.67,2.86v1.11h-1.69v-1.22c0-.75-.31-1.12-.93-1.12s-.93.37-.93,1.12v6.15c0,.74.31,1.11.93,1.11s.93-.37.93-1.11v-1.63h1.69Z'/%3e%3cpath%20class='st0'%20d='M81.4,31.14h-1.8l-.31-2.07h-2.19l-.31,2.07h-1.64l1.82-11.39h2.62l1.82,11.39ZM75.9,19.2l1.52-1.91h1.71l1.51,1.91h-1.61l-.76-.95-.75.95h-1.61ZM77.32,27.52h1.73l-.87-5.76-.87,5.76ZM83.1,15.99l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M84.86,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM84.01,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M93.51,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM92.66,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3cpath%20class='st0'%20d='M98.8,31.14h-1.79v-11.39h1.79v4.88h2.03v-4.88h1.83v11.39h-1.83v-4.88h-2.03v4.88Z'/%3e%3cpath%20class='st0'%20d='M105.36,24.55h2.46v1.62h-2.46v3.34h3.09v1.63h-4.88v-11.39h4.88v1.63h-3.09v3.18ZM108.17,17.29l-1.76,1.91h-1.26l1.17-1.91h1.86Z'/%3e%3cpath%20class='st0'%20d='M112.2,19.75c1.78,0,2.67.94,2.67,2.82v1.48c0,1.87-.89,2.81-2.67,2.81h-.85v4.28h-1.79v-11.39h2.64ZM111.35,21.37v3.86h.85c.58,0,.87-.36.87-1.08v-1.71c0-.71-.29-1.07-.87-1.07h-.85Z'/%3e%3c/g%3e%3ccircle%20class='st1'%20cx='25'%20cy='25'%20r='20'/%3e%3cpath%20class='st0'%20d='M32.78,19.27c2.92,0,4.43,2.55,5.28,5.33l.71,2.17c.14.38-.33.75-.71.75h-5.61c.19-.33.24-.71.09-1.08l-.75-2.45c-.43-1.32-.99-2.64-1.79-3.77.75-.57,1.65-.94,2.78-.94h0ZM25,18.38c3.25,0,4.9,2.78,5.89,5.89l.76,2.45c.14.42-.33.8-.8.8h-11.69c-.42,0-.94-.38-.8-.8l.75-2.45c.99-3.11,2.64-5.89,5.89-5.89h0ZM25,11.35c1.74,0,3.11,1.37,3.11,3.11s-1.37,3.11-3.11,3.11-3.11-1.41-3.11-3.11,1.41-3.11,3.11-3.11h0ZM17.27,19.27c1.08,0,1.98.38,2.73.94-.8,1.13-1.37,2.45-1.74,3.77l-.8,2.45c-.14.38-.05.75.09,1.08h-5.56c-.42,0-.9-.38-.75-.75l.71-2.17c.9-2.78,2.41-5.33,5.33-5.33h0ZM17.27,12.91c1.51,0,2.78,1.27,2.78,2.83s-1.27,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM32.78,12.91c1.56,0,2.78,1.27,2.78,2.83s-1.23,2.83-2.78,2.83-2.83-1.27-2.83-2.83,1.27-2.83,2.83-2.83h0ZM27.07,28.56v.09c0,.57-.24,1.08-.61,1.46h0v.05c-.38.33-.9.57-1.46.57s-1.08-.24-1.46-.61h0c-.38-.38-.61-.9-.61-1.46v-.09h1.41v.09c0,.19.05.38.19.47v.05c.09.09.28.19.47.19s.38-.09.47-.19v-.05c.14-.09.24-.28.24-.47t-.05-.09h1.41ZM30.99,28.56v.09c0,1.65-.66,3.16-1.74,4.24-1.08,1.08-2.59,1.79-4.24,1.79s-3.16-.71-4.24-1.79l-.05-.05c-1.04-1.08-1.7-2.55-1.7-4.2v-.09h1.41v.09c0,1.27.47,2.4,1.27,3.25h.05c.85.85,1.98,1.37,3.25,1.37s2.4-.52,3.25-1.37c.85-.8,1.37-1.98,1.37-3.25v-.09h1.37ZM34.99,28.56v.09c0,2.78-1.13,5.28-2.92,7.07-1.79,1.79-4.29,2.92-7.07,2.92s-5.23-1.13-7.07-2.92c-1.79-1.79-2.92-4.29-2.92-7.07v-.09h1.41v.09c0,2.4.94,4.53,2.5,6.08,1.56,1.56,3.72,2.5,6.08,2.5s4.52-.94,6.08-2.5c1.56-1.56,2.5-3.68,2.5-6.08v-.09h1.41Z'/%3e%3c/svg%3e)