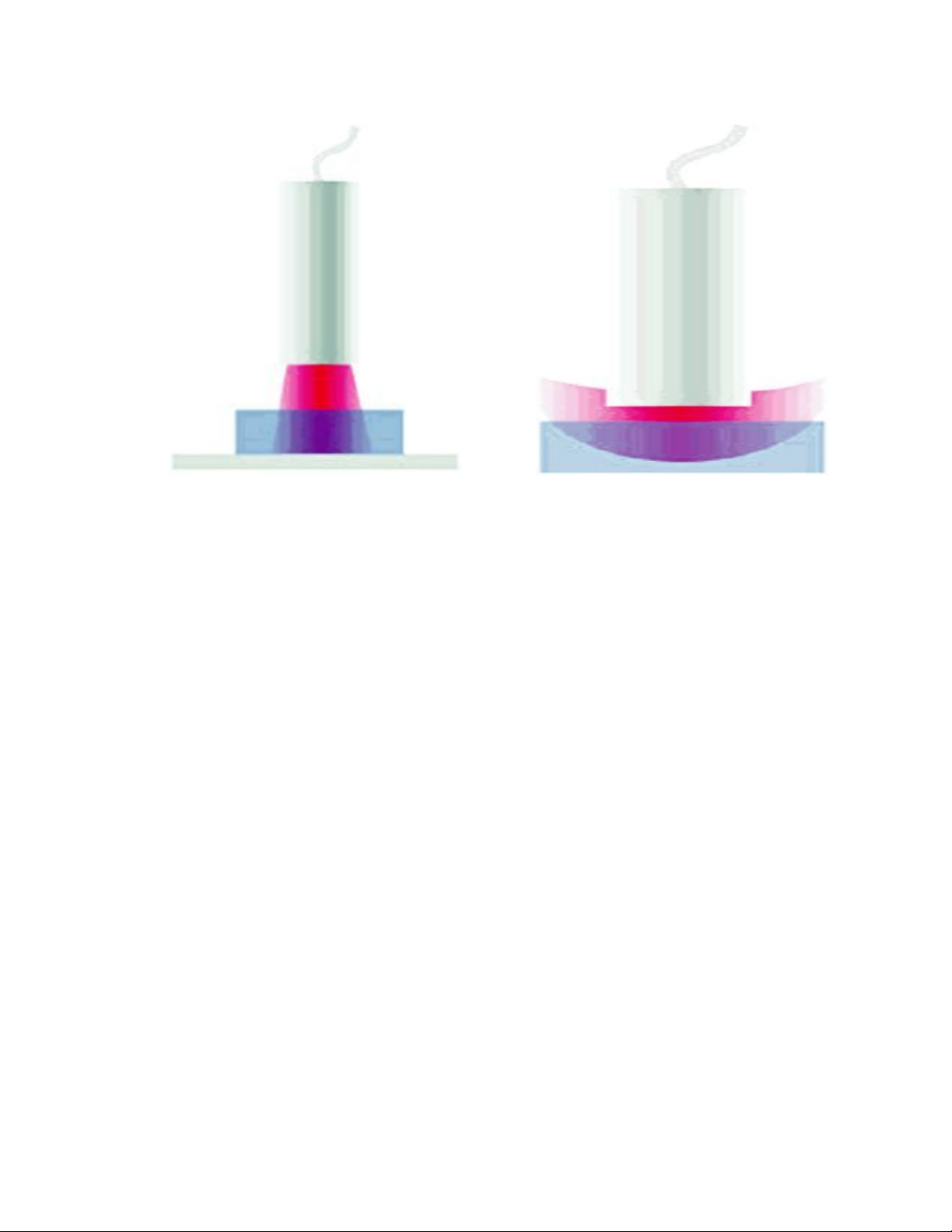
tụ gần với đầu dò, đầu dò nhỏ hơn cần phải ở một khoảng
cách đủ gần so với vật cần phát hiện để có thể thu được
lượng điện dung mong muốn. Nói chung, khoảng cách lớn
nhất mà ở đó đầu dò có thể sử dụng được là khoảng 40% của
đường kính của diện tích nhạy cảm. Các phép chuẩn hay gặp
thường giữ khoảng cách này ở một giá trị nhỏ hơn giá trị tính
toán trên một chút. Mặc dù các mạch điện tử có thể tự cân
chỉnh trong quá trình chuẩn thiết bị nhưng dẫu sao vẫn nên
có thang chuẩn giới hạn.
Phát hiện trên nhiều kênh
Thông thường, mộtđối tượng được đo một cách đồng thời
bằng nhiều đầu dò. Vì hệ thống đo sự thay đổi về điện trường
nên điện thế kích thích cho mỗi đầu dò cần được đồng bộ hóa
nếu không chúng sẽ gây ra hiện tượng nhiễu loạn lẫn nhau.
Khi không được đồng bộ hóa, một đầu dò sẽ làm tăng trường
điện trong khi một đầu dò khác sẽ làm giảm giá trị này và dĩ
nhiên kết quả lối ra sẽ không còn chính xác nữa. Các mạch
điện tử điều khiển có thể được lên cấu hình thành bộ phận